基础信息
引入
假定现在有一个无限放水的自来水厂和一个无限收水的小区,他们之间有多条水管和一些节点构成。
每一条水管有三个属性:流向,流量,容量。我们用 ( u , v ) (u,v) (u,v) 表示一条水管,这意味着水管中的水只能从 u u u 流向 v v v,而不能从 v v v 流向 u u u。流量即经过这条水管的单位时间内经过这条水管的水量。
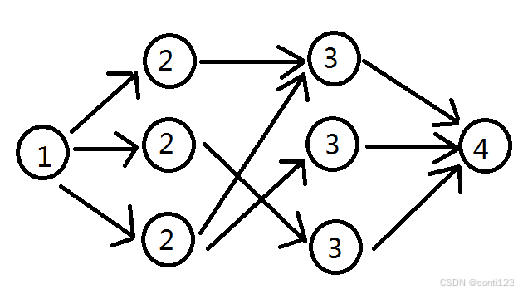
我们将其模型化成为一个有向图,如下图所示,边上的数字即为水管的容量,流向用箭头来表示。当然,现在所有的水管流量都是 0 0 0。
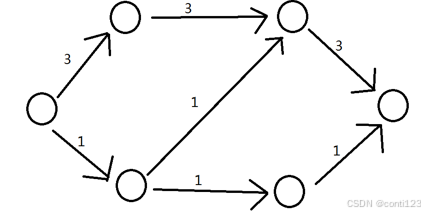
对于这一类型的有向图,我们称之为流网络。
一些概念
对于一个流网络,我们有如下几个概念:
- 源点:发送流的节点。
- 汇点:接收流的节点。
- 弧:流网络图中的有向边,为了方便,后文均用“边或弧”表示
- 弧的流量:在一个流网络中,每一条边都有一个流量,即单位时间内流经该边的流的量。一般地,我们使用流量函数 f ( x , y ) f(x,y) f(x,y) 表示 ( x , y ) (x,y) (x,y) 的流量。
- 弧的容量:在一个流网络中,每一条边都会有一个容量限制,即边上流量的最大值。一般地,我们使用容量函数 c ( x , y ) c(x,y) c(x,y) 表示 ( x , y ) (x,y) (x,y) 的容量。
- 弧的残量:即每一条边的剩余容量,可以表示为 c ( x , y ) − f ( x , y ) c(x,y)-f(x,y) c(x,y)−f(x,y),用 c f ( u , v ) c_f(u,v) cf(u,v) 表示
- 容量网络:已知每一条边的容量的流网络即为容量网络
- 流量网络:已知每一条边的流量的流网络即为流量网络
- 残量网络:已知每一条边的残量的流网络即为残量网络。所有边的流量均为 0 0 0 的残量网络就是容量网络。用 G f G_f Gf 表示,即 G f = ( V , E f ) , E f = G_f=(V,E_f),E_f= Gf=(V,Ef),Ef={ ( u , v ) ∣ c f ( u , v ) > 0 (u,v)|c_f(u,v)>0 (u,v)∣cf(u,v)>0 }
请确保你对概念比较熟悉
基本性质
- 容量限制: ∀ ( x , y ) ∈ E , 0 ≤ f ( x , y ) ≤ c ( x , y ) \forall (x,y)\in E,0\le f(x,y)\le c(x,y) ∀(x,y)∈E,0≤f(x,y)≤c(x,y)
- 斜对称性: ∀ ( x , y ) ∈ E , f ( x , y ) = − f ( y , x ) \forall (x,y)\in E,f(x,y)=-f(y,x) ∀(x,y)∈E,f(x,y)=−f(y,x)
- 流量守恒:除了源点与汇点之外,流入任何节点的流一定等于流出该节点的流。
最大流
定义
通俗地讲,回到引例,现在有一个问题需要我们去解决:水厂在单位时间内最多能发送多少水给小区?
这就是网络流中的一个问题:最大流问题。

Ford–Fulkerson 增广
- 假设有源点到汇点的一条可行路径 R R R,满足 ∀ ( x , y ) ∈ R , c f ( x , y ) > 0 \forall(x,y)∈R,c_f(x,y)>0 ∀(x,y)∈R,cf(x,y)>0,即残量为严格大于 0 0 0,我们称 R R R 为一条增广路。
- 此时我们可以得出一个简单的思路:在残量网络中不断地寻找增广路,从源点向汇点发送流。该增广路的流量满足 0 < f ≤ m i n ( c f ( x , y ) ) 0<f\le min(c_f(x,y)) 0<f≤min(cf(x,y)),为了取得最大流,我们自然而然的令该增广路的流量为 min ( c f ( x , y ) ) \min(c_f(x,y)) min(cf(x,y)),然后修改路径上每一条边的残量即可。
- 这个思路即为Ford−Fulkerson方法,简称为FF方法。
- 可以使用DFS实现基本的Ford−Fulkerson算法。
- 为了保证算法的正确性,有时候我们需要缩减流网络中一些特定边的流量。
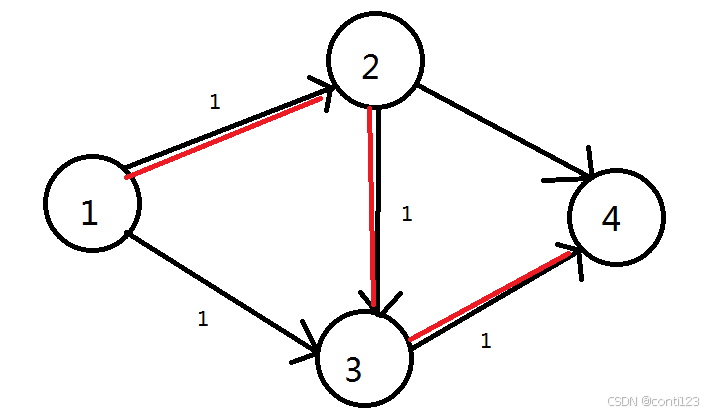
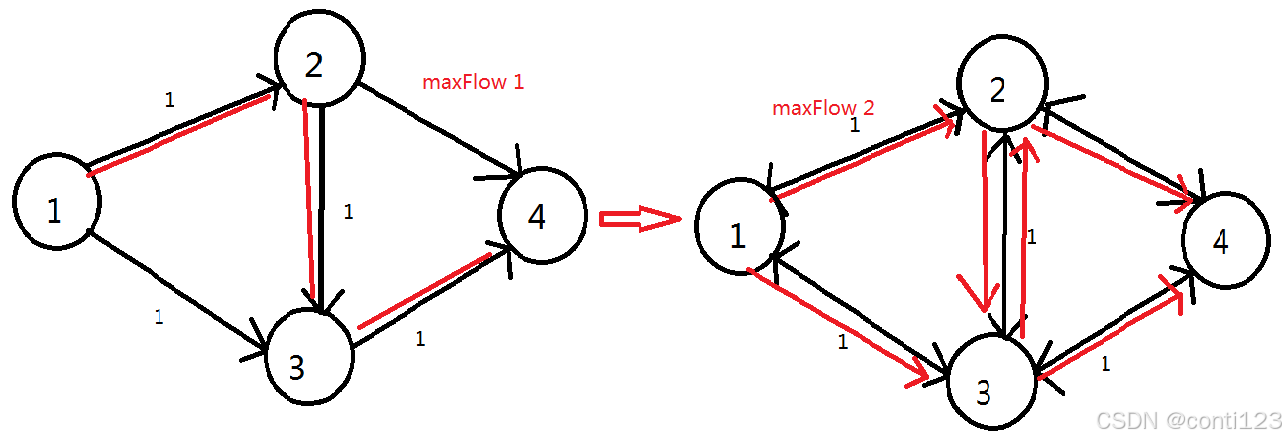
- 举个例子,如图。
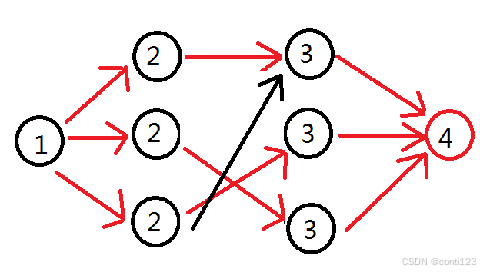
假定我们使用DFS找到了红色的这一条增广路径,显然此时源点到汇点的流量为1。此时图中不再有任何增广路径,但是这个流是最大流吗?
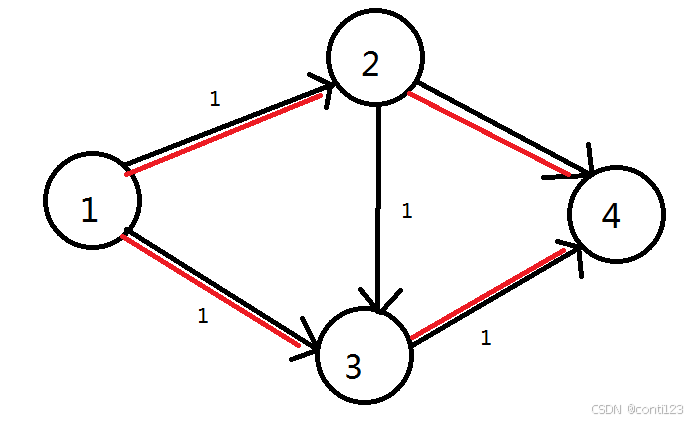
显然不是,我们可以找到更好的,如图:
此时流量为
2
2
2,这才是最大流。
- 问题出在哪里?
- 由于我们没有给程序一个反悔的机会,所以才会出现上面这样的尴尬情况。
- 那么如何解决这个问题呢?
- 引入“后向弧”。我们给每一条边 ( u , v ) (u,v) (u,v) 建立一条对应的反向边 ( v , u ) (v,u) (v,u),用于对正向边流量的缩减。
- 很自然地,我们会把反向边的初始残量设置为 0 0 0,因为没有正向流量,无法缩减。
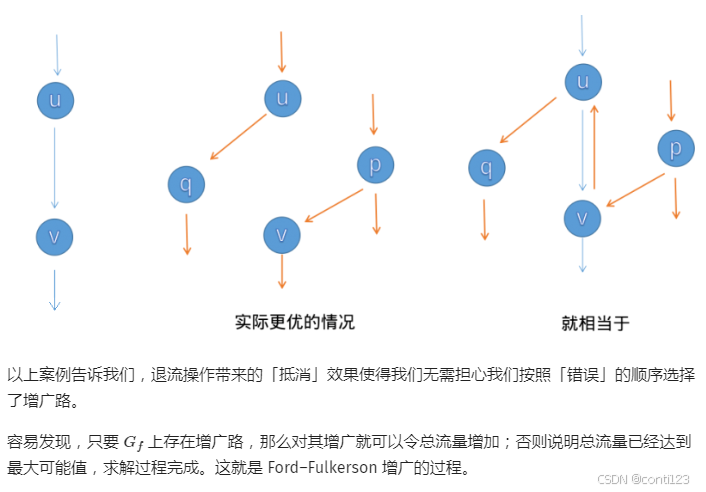
- 那么观察下面的算法图示:
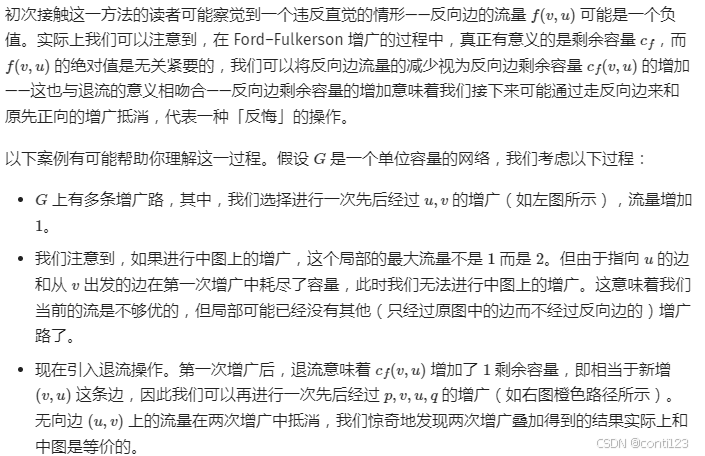
然后对于初学者可能会注意到:反向边的流量
f
(
v
,
u
)
f(v,u)
f(v,u) 可能是一个负的,这里可以参考一下 OI-WIKI 的解释。
是不是有点懵?
- 通俗的文字解释就是:反向边的功能是将正向边的流量往回推送,此时反向边推送的流量(反向流量)最多恰好把正向流量抵消,所以反向边的残量等于正向边流量。
- 综上所述,反向边的残量应当是动态更新,一旦正向边的流量更新,反向边的残量也需要更新。
Edmons−Karp算法
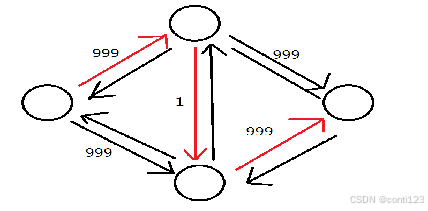
观察到基于 DFS 的FF 可能不是很优。
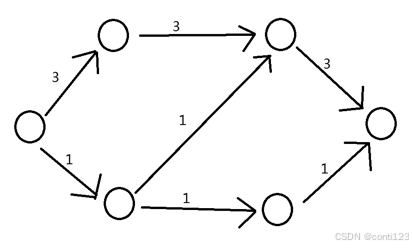
- 观察这样一张图,如果我们使用基于DFS实现的FF方法,假定一开始找到的增广路径为红色的这一条,那么我们可能需要反复进行
999
×
2
999\times 2
999×2次DFS才能够找到最大流。
- 但是事实上,我们在最好情况下只需要走两次(直接走 999 999 999 的边)就能够达到最大流。
- 在这种情况下,我们引入EK算法。其基础仍然是FF方法,但是我们不再使用DFS,而是转为使用BFS寻找最短增广路改进效率,时间复杂度为 O ( n m 2 ) O(nm^2) O(nm2)。
参考代码:
queue<int> que;flow[s]=0x3f3f3f3f;que.push(s);
for (int i=1;i<=n;i++)prep[i]=-1,pree[i]=0;
prep[s]=0;
while(!que.empty())
{
int now=que.front();
que.pop();
for (int i=head[now];i;i=e[i].next)
{
if(e[i].val>0&&prep[e[i].to]==-1)
{
flow[e[i].to]=min(flow[now],e[i].val);//flow记录的是在增广路上经过该点的流量
pree[e[i].to]=i;//用于记录前驱边的编号
prep[e[i].to]=now;//用于记录前驱节点
if (e[i].to==t) break;
que.push(e[i].to);
}
}
}
if (prep[t]!=-1) return flow[t];
else return -1;
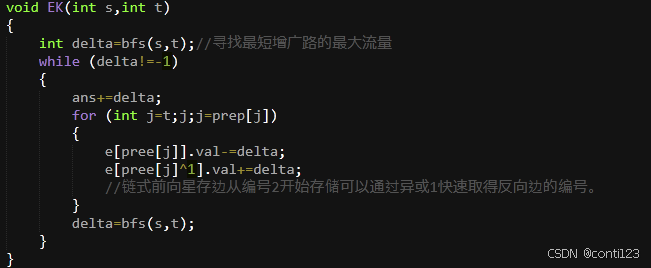
- 下一步就是对路径上的所有边进行信息的更新。
- 现在有一个问题,我们如何快速取得反向边呢?
- 对于链式前向星,我们设置第一条边的编号为 2 2 2 ,我们存入一条正向边时,下一条边就存入反向边,那么只要对一条边的编号异或 1 1 1 就能取得它对应的反向边。
- 证明:偶数的二进制表示最后一位为
0
0
0 ,对这个偶数异或
1
1
1 相当于对这个偶数
+
1
+1
+1。奇数的二进制表示最后一位为
1
1
1,对这个奇数异或
1
1
1 相当于对这个奇数
−
1
-1
−1。
那么路径的信息更新就可以轻松实现了。
Dinic 算法
- 由于EK算法每次只求一条最短增广路,其效率在某些情况下可能不够优秀。
- 对于下面这一张图,如果我们使用EK算法,那么我们至少需要重复三次EK算法的流程才能求出最大流。
- 自然而然地,我们会想到能不能实现多路增广呢?
于是 Dinic 算法就出来了。(其实就是把EK和FF融在一起)
Dinic算法的流程如下:
- BFS对流网络分层。
- DFS对图上增广路的信息进行更新。
如图所示,此时已经完成了对于流网络的分层,点上的编号即为所在的层数。
这个时候我们从源点开始DFS,在最好情况下,我们能同时找到三条增广路,即标红色的三条。
- BFS对图分层的作用在于一次可以得到多条长度相同的最短增广路。
- 那么路径的信息应该如何更新呢?
- 每次从当前点出发,选用从当前点所在层到下一层的边,发送一定的流量,流量的大小取边残量和当前点从源点获取的剩余流中两者的最小值。
- 搜索完成后,即不再有流能够往后发送,或者能够抵达汇点。此时返回一个流量值,即这条增广路的流量(若不再有流能够往后发送,则返回的流量值为0),此时就能够对边和反向边的残量进行更新了。
- Dinic算法就完成了,其时间复杂度为 O ( n 2 m ) O(n^2 m) O(n2m)。
- 显然,这样的时间复杂度并算不上多么高效,原因在于尽管我们一次BFS找到了多条增广路,但是DFS时路径的信息仍然是一条一条更新的。
参考代码:
BFS实现:
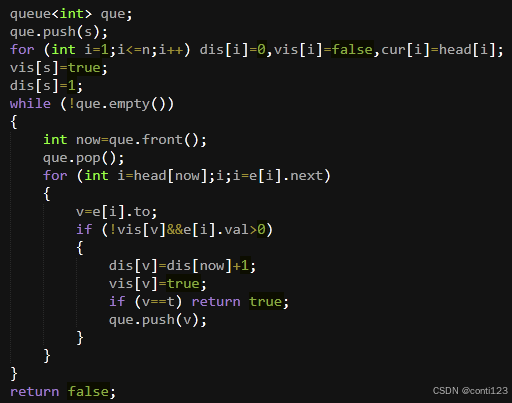
实现难度不大,只是一个模板BFS。
dis数组用于记录层数,vis数组用于记录是否被访问过。
事实上vis数组是不必要的,因为dis数组也可以实现一样的功能。
DFS实现:
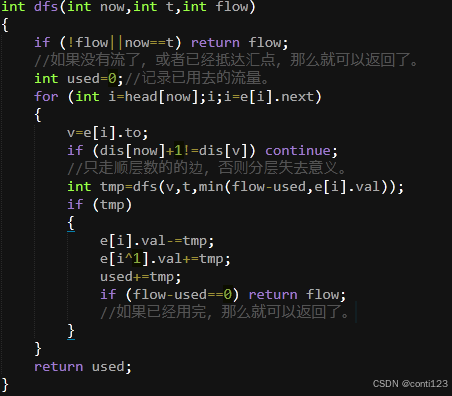
注意到,Dinic算法的复杂度上界也不是很优, 所以,我们会考虑对DFS的过程加入一定的优化。
当前弧优化:
- 在DFS的过程中,我们可能会多次经过一个点。我们会重复的处理一些边。
- 但是事实上,在每次处理的过程中,已经处理完毕的边在这次DFS中不再有任何作用,一旦处理完毕,该边的“潜力”一定已经被榨干了。
- 所以,我们每次只需要记录当前处理的边的编号,下次经过这个点的时候,可以直接从这条边开始。
- 这就叫作当前弧优化。
证明:增广次数为 O ( m ) O(m) O(m),每次增广最多经过 O ( n ) O(n) O(n) 个点,总复杂度为 O ( n m ) O(nm) O(nm)
注意,不写这个优化,复杂度是错的,可能退化为 O ( n m 2 ) O(nm^2) O(nm2)
点优化:
-
假如从一个点流不出流量,则把该点的dis变为 − 1 -1 −1,这样这一次多路增广再也不会来了。
-
大多数情况下这只能优化常数,但是在某些毒瘤题里面跑的很快。
这就是常用的两个优化,更多的可以参考 command_block大佬的博客。
虽然EK和Dinic的时间复杂度上界都不是非常优秀,但是在实际应用上效率非常高。
对于EK算法,一般能够解决
1
0
3
到
1
0
4
10^3 \text{到}10^4
103到104 的网络流问题。
对于Dinic算法,一般能够解决
1
0
4
到
1
0
5
10^4 \text{到}10^5
104到105 的网络流问题。
Dinic完整的参考代码:
#include<bits/stdc++.h>
#define int long long
#define IOS ios::sync_with_stdio(false),cin.tie(NULL),cout.tie(NULL)
using namespace std;
const int N=1e5+1,inf=1e9;
struct fy{
int v,w,nxt;
}e[N];
int head[N],idx=1,n,m,s,t,ans=0,dis[N],cur[N],vis[N];
void add(int x,int y,int z){
e[++idx].v=y,e[idx].w=z,e[idx].nxt=head[x],head[x]=idx;
}
bool bfs(){
for(int i=1;i<=n;i++)
dis[i]=0,vis[i]=0,cur[i]=head[i];
vis[s]=1,dis[s]=1;
queue<int>Q;
Q.push(s);
while(!Q.empty()){
int u=Q.front();
Q.pop();
for(int i=head[u];i;i=e[i].nxt){
int v=e[i].v;
if(!vis[v]&&e[i].w>0){
dis[v]=dis[u]+1;
vis[v]=1;
if(v==t)
return 1;
Q.push(v);
}
}
}
return 0;
}
int dfs(int u,int flow){
if(!flow||u==t)
return flow;
int used=0;
for(int i=cur[u];i;i=e[i].nxt){
cur[u]=i;
int v=e[i].v;
if(dis[u]+1!=dis[v])
continue;
int _=dfs(v,min(flow-used,e[i].w));
if(_){
e[i].w-=_;
e[i^1].w+=_;
used+=_;
if(flow-used==0)
return flow;
}
}
return used;
}
signed main(){
IOS;
cin>>n>>m>>s>>t;
for(int i=1,x,y,z;i<=m;i++)
cin>>x>>y>>z,add(x,y,z),add(y,x,0);
while(bfs())
ans+=dfs(s,inf);
cout<<ans<<"\n";
return 0;
}
当然,常用的是Dinic,但还有MPN算法,ISAP,Push-Relabel 预流推进算法 等其他方法,可能以后会填坑