目录
一、LCD1602液晶显示屏

1.说明
1.引脚接口说明
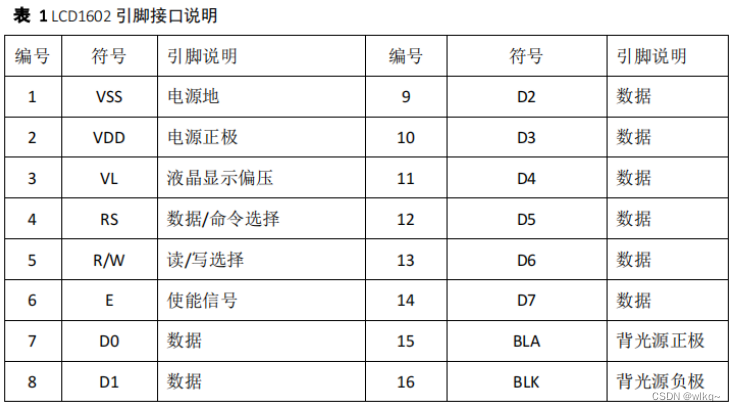
第 1 脚: VSS 为电源地
第 2 脚: VDD 接 5V 正电源
第 3 脚: VL 为液晶显示器对比度调整端,接正电源时对比度最弱,接地时对比度最高,对比度 过高时会产生“鬼影”,使用时可以通过一个 10K 的电位器调整对比度。
第 4 脚:RS 为寄存器选择,高电平时选择数据寄存器、低电平时选择指令寄存器。
第 5 脚:R/W 为读写信号线,高电平时进行读操作,低电平时进行写操作。
当 RS 和 R/W 共 同为低电平时可以写入指令或者显示地址,
当 RS 为低电平 R/W 为高电平时可以读忙信号,
当 RS 为高电平 R/W 为低电平时可以写入数据。
第 6 脚:E 端为使能端,当 E 端由高电平跳变成低电平时,液晶模块执行命令。
第 7-14 脚:D0~D7 为 8 位双向数据线。
第 15 脚:背光源正极。
第 16 脚:背光源负极。
2.模块控制指令

3.在什么位置显示
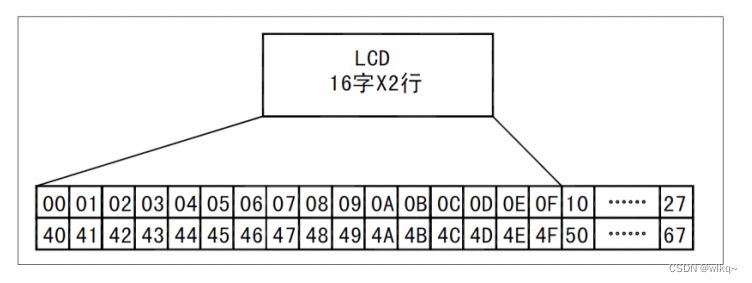
例如:第二行第一个字符的地址是 40H,那么是否直接写入 40H 就可以将光标定位在第二行第 一个字符的位置呢?这样不行,因为写入显示地址时要求最高位 D7 恒定为高电平 1 所以实 际写入的数据应该是 01000000B(40H) +10000000B(80H)=11000000B(C0H)。
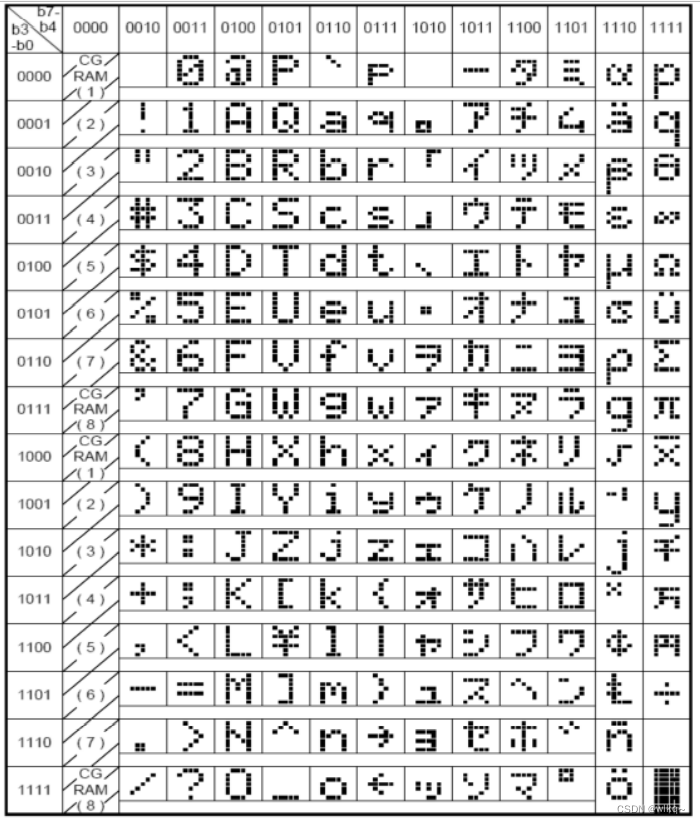
4.显示什么(Ascll码表)
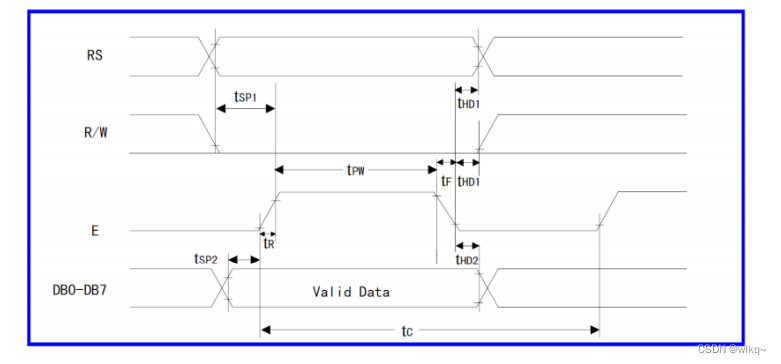
5.读操作时序
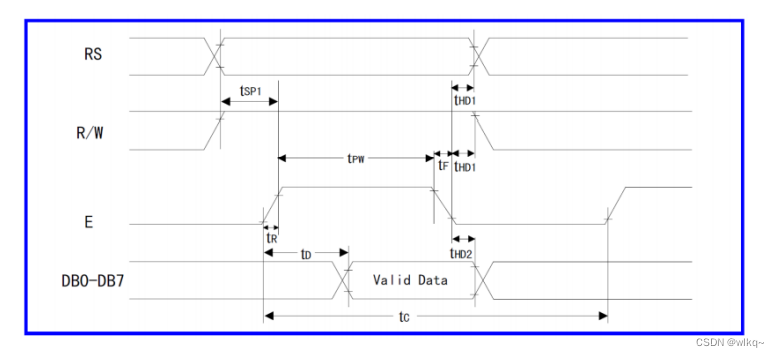
6.写操作时序
2.例子(LDC显示字符)
1.接线
D0~D7->A0~A7 RS -> B1 RW -> B2 EN -> B10 V0 ->GND
BLA ->VCC BLK->GND
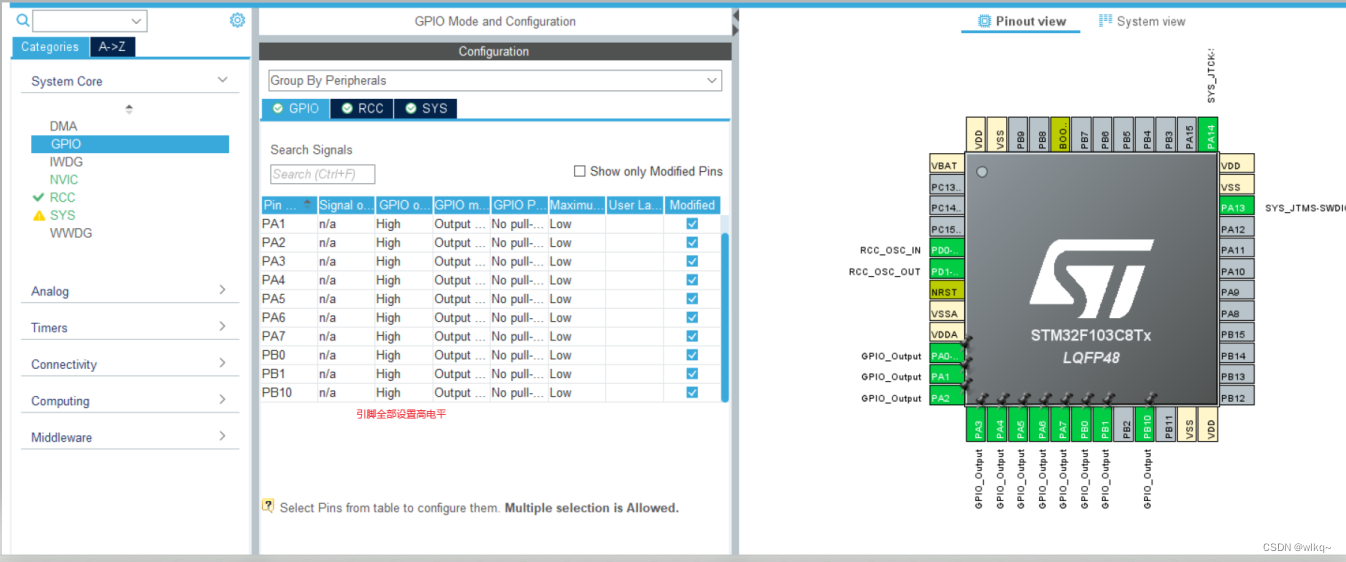
2.配置
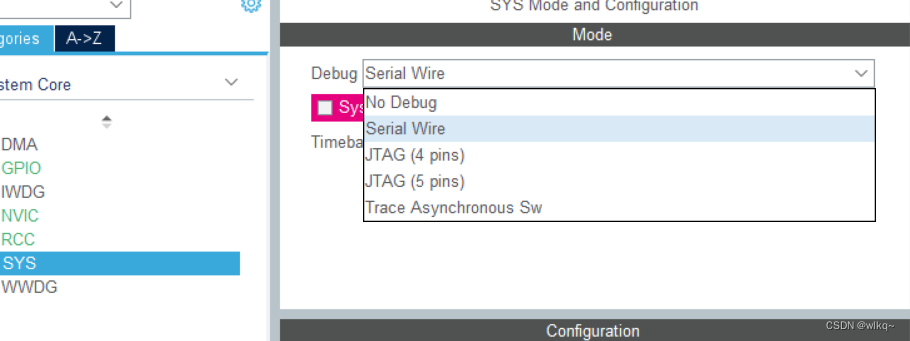
1.SYS
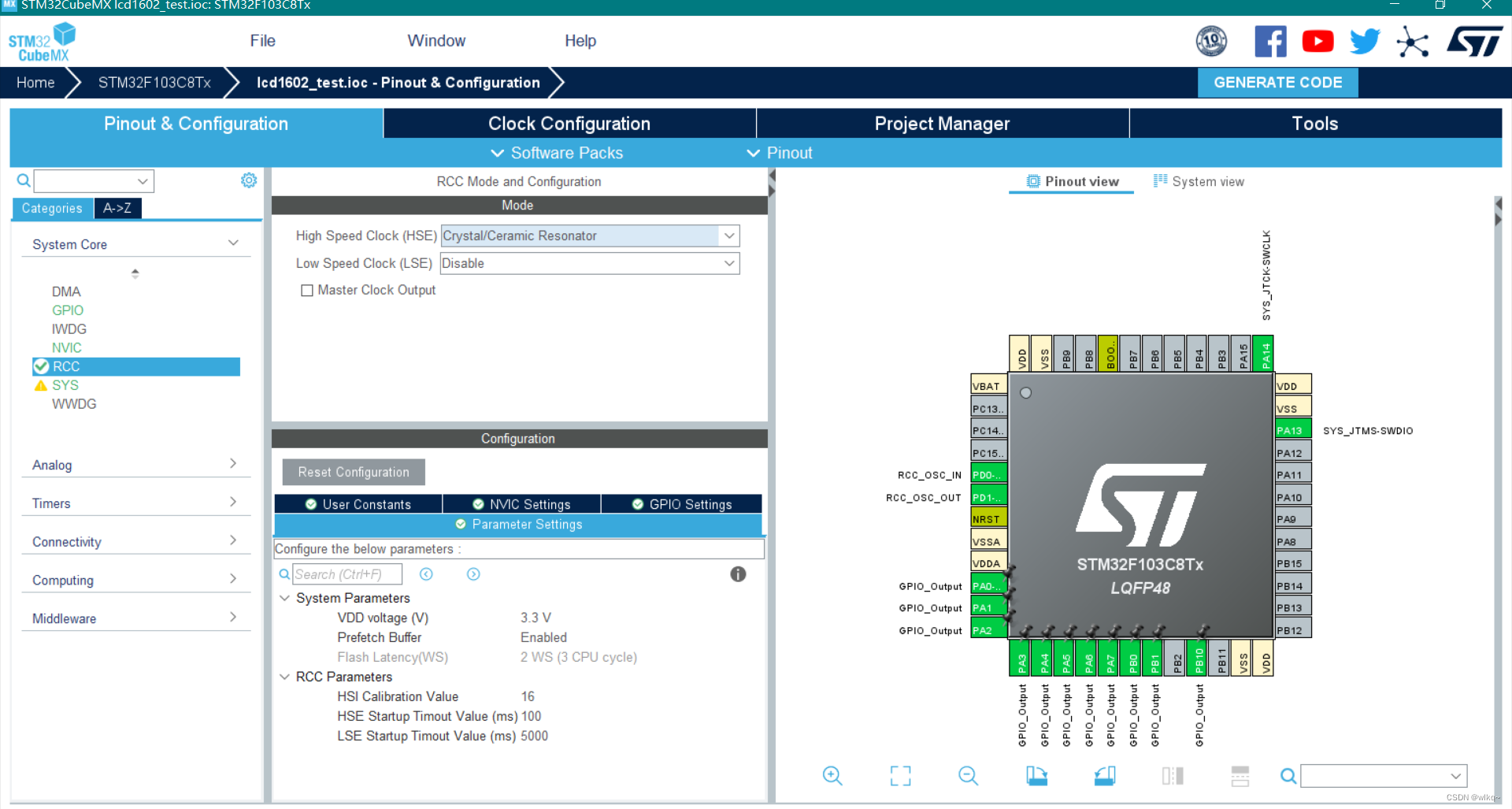
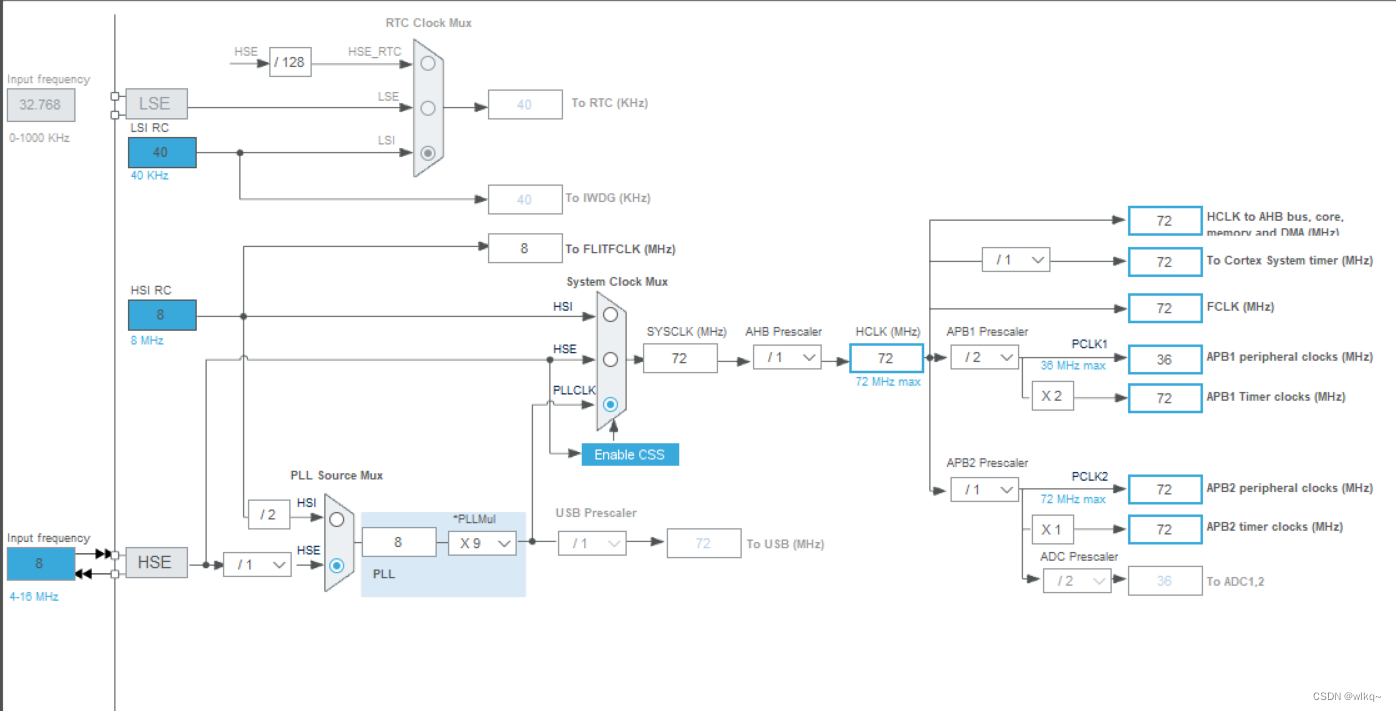
2.RCC
3.main.c代码(显示jiayou)
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//宏定义 为了更加简便
#define RS_GPIO_Port GPIOB
#define RW_GPIO_Port GPIOB
#define EN_GPIO_Port GPIOB
#define RS_Pin GPIO_PIN_1
#define RW_Pin GPIO_PIN_10
#define EN_Pin GPIO_PIN_0
#define RS_HIGH HAL_GPIO_WritePin(RS_GPIO_Port, RS_Pin, GPIO_PIN_SET)//RS拉高
#define RS_LOW HAL_GPIO_WritePin(RS_GPIO_Port, RS_Pin, GPIO_PIN_RESET)
#define RW_HIGH HAL_GPIO_WritePin(RW_GPIO_Port, RW_Pin, GPIO_PIN_SET)//RW拉高
#define RW_LOW HAL_GPIO_WritePin(RW_GPIO_Port, RW_Pin, GPIO_PIN_RESET)
#define EN_HIGH HAL_GPIO_WritePin(EN_GPIO_Port, EN_Pin, GPIO_PIN_SET)//EN拉高
#define EN_LOW HAL_GPIO_WritePin(EN_GPIO_Port, EN_Pin, GPIO_PIN_RESET)
void Write_Cmd_Func(uint8_t cmd)//写命令
{
RS_LOW;
RW_LOW;
EN_LOW;
GPIOA->ODR = cmd;//cmd的数据按位输出给A口
HAL_Delay(5);//5ms
EN_HIGH;
HAL_Delay(5);
EN_LOW;
}
void Write_Data_Func(uint8_t dataShow)//写数据
{
RS_HIGH;
RW_LOW;
EN_LOW;
GPIOA->ODR = dataShow;
HAL_Delay(5);
EN_HIGH;
HAL_Delay(5);
EN_LOW;
}
void LCD1602_INIT(void)//初始化
{
//(1)延时 15ms
HAL_Delay(15);
//(2)写指令 38H(不检测忙信号)
Write_Cmd_Func(0x38);
//(3)延时 5ms
HAL_Delay(5);
//(4)以后每次写指令,读/写数据操作均需要检测忙信号
//(5)写指令 38H:显示模式设置
Write_Cmd_Func(0x38);
//(6)写指令 08H:显示关闭
Write_Cmd_Func(0x08);
//(7)写指令 01H:显示清屏
Write_Cmd_Func(0x01);
//(8)写指令 06H:显示光标移动设置
Write_Cmd_Func(0x06);
//(9)写指令 0CH:显示开及光标设置}
Write_Cmd_Func(0x0c);
}
void LCD1602_showLine(char row, char col, char *string)
{
switch(row){
case 1:
Write_Cmd_Func(0x80+col);//第一行
while(*string){
Write_Data_Func(*string);
string++;
}
break;
case 2:
Write_Cmd_Func(0x80+0x40+col);//第二行
while(*string){
Write_Data_Func(*string);
string++;
}
break;
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
LCD1602_INIT();//初始化
LCD1602_showLine(1,1,"jia");//横、列、字符串
LCD1602_showLine(2,1,"you");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
二、DHT11温湿度传感器

详细介绍看(1条消息) STM32—项目三(温湿度在oled屏显示)_wlkq~的博客-CSDN博客
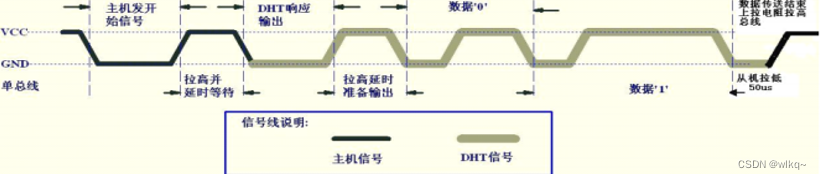
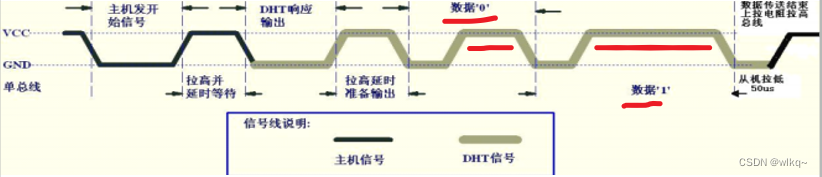
1.总时序图(主机信号由代码设置波形,DHT信号由DHT11发出)
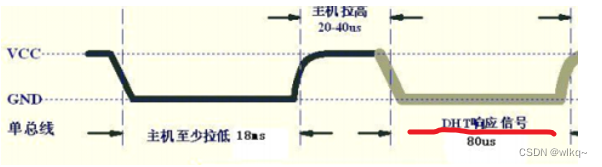
2.初始化部分 检测模块是否存在(检测下图DHT响应信号有没有被拉低)
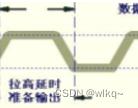
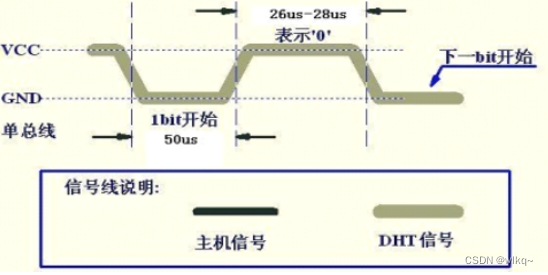
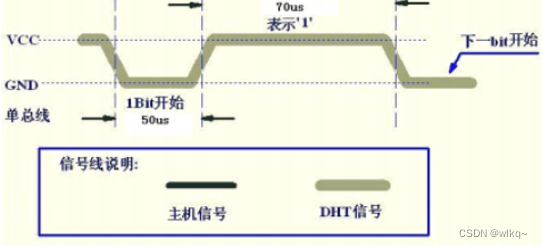
3.接收数据部分(有效数据都是高电平,但持续时间不一样,可通过延时后是否被拉低来判断是0还是1)
DHT11传输0的时序分析
DHT11传输1的时序分析
4.数据格式
只有一根数据线DAT,发送序列指令给DHT11模块,模块就会传输一次完整的数据为40bit(8bit湿度整数数据+8bit湿度小数数据+8bi温度整数数据+8bit温度小数数据+8bit校验),高位先出。
三、实验(LCD屏显示温湿度)
1.接线
D0~D7->A0~A7 RS -> B1 RW -> B2 EN -> B10 V0 ->GND
BLA ->VCC BLK->GND
DAT->B3
2.配置
1.SYS
2.RCC
4.B3既作为输入,也作为输出,则不能直接在CubeMX里配置,需要自己写代码。
3.main.c代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//LCD宏定义 为了更加简便
#define RS_GPIO_Port GPIOB
#define RW_GPIO_Port GPIOB
#define EN_GPIO_Port GPIOB
#define RS_Pin GPIO_PIN_1
#define RW_Pin GPIO_PIN_10
#define EN_Pin GPIO_PIN_0
#define RS_HIGH HAL_GPIO_WritePin(RS_GPIO_Port, RS_Pin, GPIO_PIN_SET)//RS拉高
#define RS_LOW HAL_GPIO_WritePin(RS_GPIO_Port, RS_Pin, GPIO_PIN_RESET)
#define RW_HIGH HAL_GPIO_WritePin(RW_GPIO_Port, RW_Pin, GPIO_PIN_SET)//RW拉高
#define RW_LOW HAL_GPIO_WritePin(RW_GPIO_Port, RW_Pin, GPIO_PIN_RESET)
#define EN_HIGH HAL_GPIO_WritePin(EN_GPIO_Port, EN_Pin, GPIO_PIN_SET)//EN拉高
#define EN_LOW HAL_GPIO_WritePin(EN_GPIO_Port, EN_Pin, GPIO_PIN_RESET)
//DH11宏定义
#define DAT_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_3, GPIO_PIN_RESET)
#define DAT_HIGH HAL_GPIO_WritePin(GPIOB, GPIO_PIN_3, GPIO_PIN_SET)
#define DAT_VALUE HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_3)
void delay_us(uint32_t us)//微妙延时
{
uint32_t delay = (HAL_RCC_GetHCLKFreq() / 4000000 * us);
while (delay--)
{
;
}
}
void Write_Cmd_Func(uint8_t cmd)//LCD写命令
{
RS_LOW;
RW_LOW;
EN_LOW;
GPIOA->ODR = cmd;//cmd的数据按位输出给A口
HAL_Delay(5);//5ms
EN_HIGH;
HAL_Delay(5);
EN_LOW;
}
void Write_Data_Func(uint8_t dataShow)//LCD写数据
{
RS_HIGH;
RW_LOW;
EN_LOW;
GPIOA->ODR = dataShow;
HAL_Delay(5);
EN_HIGH;
HAL_Delay(5);
EN_LOW;
}
void LCD1602_INIT(void)//LCD初始化
{
//(1)延时 15ms
HAL_Delay(15);
//(2)写指令 38H(不检测忙信号)
Write_Cmd_Func(0x38);
//(3)延时 5ms
HAL_Delay(5);
//(4)以后每次写指令,读/写数据操作均需要检测忙信号
//(5)写指令 38H:显示模式设置
Write_Cmd_Func(0x38);
//(6)写指令 08H:显示关闭
Write_Cmd_Func(0x08);
//(7)写指令 01H:显示清屏
Write_Cmd_Func(0x01);
//(8)写指令 06H:显示光标移动设置
Write_Cmd_Func(0x06);
//(9)写指令 0CH:显示开及光标设置}
Write_Cmd_Func(0x0c);
}
void LCD1602_showLine(char row, char col, char *string)//LCD行、列、字符串显示
{
switch(row){
case 1:
Write_Cmd_Func(0x80+col);//第一行
while(*string){
Write_Data_Func(*string);
string++;
}
break;
case 2:
Write_Cmd_Func(0x80+0x40+col);//第二行
while(*string){
Write_Data_Func(*string);
string++;
}
break;
}
}
void DHT_GPIO_Init(uint32_t Mode)//初始化GPIO口,PB3口接温度传感器DAT
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOB_CLK_ENABLE();//时钟
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = Mode;//输出还是输入
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
void DHT11_Start()//DHT11初始化开始信号
{
//下面是主机信号
DHT_GPIO_Init(GPIO_MODE_OUTPUT_PP);//PA5设置为输出推挽模式
DAT_HIGH;
DAT_LOW;
HAL_Delay(30);//ms
DAT_HIGH;
DHT_GPIO_Init(GPIO_MODE_INPUT);//PA5设置为输入模式
//下面是DHT信号,如果符合DHT信号时序图就进行运行
while(DAT_VALUE);
//dht=0
while(!DAT_VALUE);
//dht=1
while(DAT_VALUE);//之后开始传输数据
//dht=0
}
uint8_t data[5];//存放DH11数据
void DHT11_Read()//接收DH11数据
{
int i;
int j;
char tmp;//移位,存放8个bit
char flag;//标志位
DHT11_Start();//重启进入高速模式之后才发送bit
DHT_GPIO_Init(GPIO_MODE_INPUT);//PA5设置为输入模式
for(i = 0;i < 5;i++){//取4个字节
for(j=0;j<8;j++){//每个字节取8个bit
while(!DAT_VALUE);//卡g点数据来会从0变成1
delay_us(40); //延时读取
if(DAT_VALUE == 1){
flag = 1;
while(DAT_VALUE);//等待变位70us下一个bit
}else{
flag = 0;
}
tmp = tmp << 1;//左移一位或者 tmp<<=1,为了使先出来的bit到高位
tmp |= flag;//可以为 tmp=tmp|flag
}
data[i] = tmp;//得到8个bit为一个字节,存放在数组里
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
char SpeedMes[16];//存放显示的字符串
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
LCD1602_INIT();//初始化
DHT11_Read();//读取数据
sprintf(SpeedMes,"H:%d.%d",data[0], data[1]);
LCD1602_showLine(1,0,SpeedMes);//横、列、字符串
sprintf(SpeedMes,"T:%d.%d",data[2], data[3]);
LCD1602_showLine(2,0,SpeedMes);//横、列、字符串
HAL_Delay(600);// 600毫秒
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */