(1) 问题描述
OpenPose可以解决多人骨骼、手势、面部实时识别的问题。本项目是OpenPose获取的数据在Unity3D中的一个实现,可将解析出来的坐标数据在Unity中进行调用,实现Unity模型的随动控制。
(2) OpenPose的安装
请参考:
Win10的VS17/15环境下OpenPose的安装部署,以及一些经验分享
https://blog.csdn.net/BenJamin_Blue/article/details/84574750
(3) JSON数据的解析
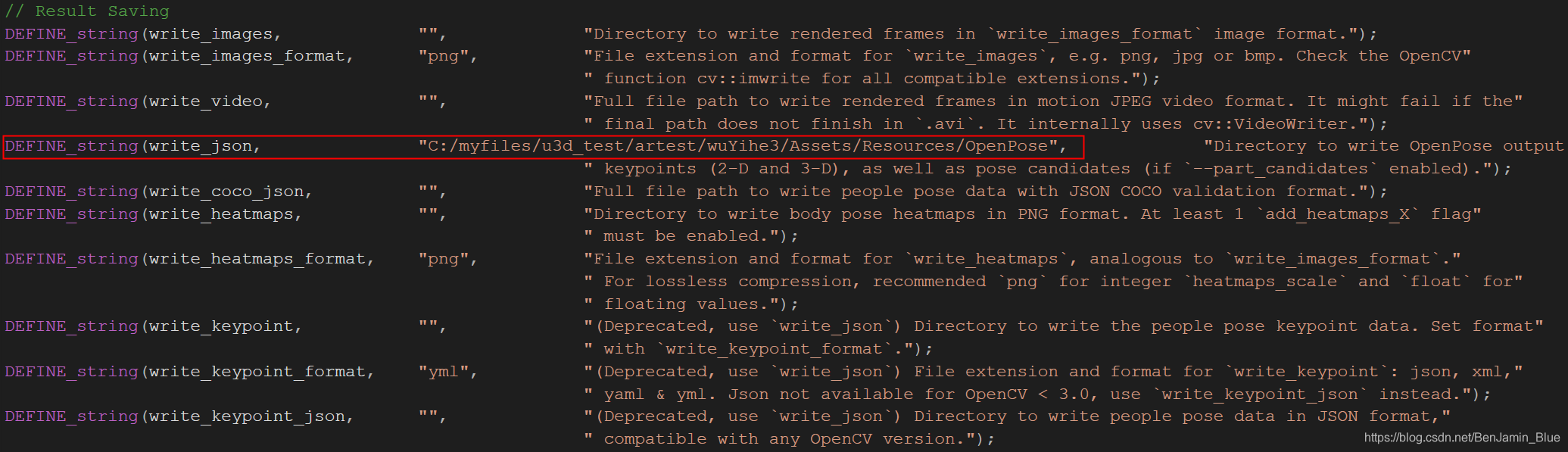
对OpenPose结果保留的源码做如图所示处理,即可获得JSON格式的节点坐标数据。
其中框选位置为JSON数据的保存路径。
数据的解析过程请参考:
JSON数据的Unity3D解析过程
https://blog.csdn.net/BenJamin_Blue/article/details/86565510
代码如下:
using UnityEngine;
using System;
using System.Collections;
using System.Linq;
using System.Text;
using System.Collections.Generic;
[Serializable]
public class ModelTest
{
public float version;
public List<People_sets> people;
}
[Serializable]
public class People_sets
{
public float[] pose_keypoints_2d;
// public float[] hand_left_keypoints_2d;
// public float[] hand_right_keypoints_2d;
}
using UnityEngine;
using System.IO;
using System.Text;
using System;
using System.Collections;
using System.Linq;
using System.Collections.Generic;
public class JsonTest : MonoBehaviour
{
static public float[] pose_joint_x = new float[20];
static public float[] pose_joint_y = new float[20];
int num = 0;
// Use this for initialization
void Start()
{
}
// Update is called once per frame
void Update()
{
try
{
num += 1;
//get the last file name
string numString = Convert.ToString(num);
string zero = "";
string pathBefore = "/Resources/OpenPose/";
for (int j = 0; j < (12 - numString.Length); j++)
{
zero = zero + "0";
}
Debug.Log(pathBefore + zero + numString + "_keypoints.json");
//analysis data from json
string jsonTest = File.ReadAllText(Application.dataPath + pathBefore + zero + numString + "_keypoints.json", Encoding.UTF8);
ModelTest obj = JsonUtility.FromJson<ModelTest>(jsonTest);
//pervent joints return to (0,0,0)
for (int i = 0; i < 18; i++)
{
if (obj.people[0].pose_keypoints_2d[3 * i] == 0.0f)
{
}
else
{
pose_joint_x[i] = obj.people[0].pose_keypoints_2d[3 * i];
}
if (obj.people[0].pose_keypoints_2d[3 * i + 1] == 0.0f)
{
}
else
{
pose_joint_y[i] = obj.people[0].pose_keypoints_2d[3 * i + 1];
}
}
}
catch (ArgumentOutOfRangeException)
{
}
//stay if file doesn't reach the num
catch (FileNotFoundException)
{
num = num - 1;
}
}
}
(4) 人物点线模型的构建&节点的运动
请参考:
Unity3D人体18节点骨骼动态简单点线模型的建立
https://blog.csdn.net/BenJamin_Blue/article/details/86566015
代码如下:
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using System.Threading;
public class MoveJoints : MonoBehaviour
{
#region definition
public float speed = 5f;
//线段渲染器*4
private LineRenderer lineRenderer1;
private LineRenderer lineRenderer2;
private LineRenderer lineRenderer3;
private LineRenderer lineRenderer4;
private int lineLength = 300;
GameObject LEar16;
GameObject LEye14;
GameObject MNose0;
GameObject REye15;
GameObject REar17;
GameObject MMid1;
GameObject LShoulder2;
GameObject RShoulder5;
GameObject LElbow3;
GameObject RElbow6;
GameObject LWrist4;
GameObject RWrist7;
GameObject LAss8;
GameObject RAss11;
GameObject LKnee9;
GameObject RKnee12;
GameObject LFoot10;
GameObject RFoot13;
#endregion
//将场景的物体关联到该脚本中
void InitObject()
{
LEar16 = GameObject.Find("LEar16");
LEye14 = GameObject.Find("LEye14");
MNose0 = GameObject.Find("MNose0");
REye15 = GameObject.Find("REye15");
REar17 = GameObject.Find("REar17");
MMid1 = GameObject.Find("MMid1");
LShoulder2 = GameObject.Find("LShoulder2");
RShoulder5 = GameObject.Find("RShoulder5");
LElbow3 = GameObject.Find("LElbow3");
RElbow6 = GameObject.Find("RElbow6");
LWrist4 = GameObject.Find("LWrist4");
RWrist7 = GameObject.Find("RWrist7");
LAss8 = GameObject.Find("LAss8");
RAss11 = GameObject.Find("RAss11");
LKnee9 = GameObject.Find("LKnee9");
RKnee12 = GameObject.Find("RKnee12");
LFoot10 = GameObject.Find("LFoot10");
RFoot13 = GameObject.Find("RFoot13");
// Line1 = GameObject.Find("Line1");
lineRenderer1 = (LineRenderer)MNose0.GetComponent("LineRenderer");
lineRenderer2 = (LineRenderer)MMid1.GetComponent("LineRenderer");
lineRenderer3 = (LineRenderer)LShoulder2.GetComponent("LineRenderer");
lineRenderer4 = (LineRenderer)LElbow3.GetComponent("LineRenderer");
}
// Use this for initialization
void Start()
{
InitObject();
lineRenderer1.positionCount = lineLength;
lineRenderer2.positionCount = lineLength;
lineRenderer3.positionCount = lineLength;
lineRenderer4.positionCount = lineLength;
lineRenderer1.positionCount = 7;
lineRenderer2.positionCount = 7;
lineRenderer3.positionCount = 4;
lineRenderer4.positionCount = 4;
}
// Update is called once per frame
void Update()
{
float step = speed * Time.deltaTime;
//move joints using interpolation method
LEar16.transform.localPosition = new Vector3(Mathf.Lerp(LEar16.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[16], step), Mathf.Lerp(LEar16.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[16], step), 0);
MNose0.transform.localPosition = new Vector3(Mathf.Lerp(MNose0.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[0], step), Mathf.Lerp(MNose0.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[0], step), 0);
LEye14.transform.localPosition = new Vector3(Mathf.Lerp(LEye14.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[14], step), Mathf.Lerp(LEye14.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[14], step), 0);
REye15.transform.localPosition = new Vector3(Mathf.Lerp(REye15.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[15], step), Mathf.Lerp(REye15.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[15], step), 0);
MMid1.transform.localPosition = new Vector3(Mathf.Lerp(MMid1.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[1], step), Mathf.Lerp(MMid1.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[1], step), 0);
LShoulder2.transform.localPosition = new Vector3(Mathf.Lerp(LShoulder2.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[2], step), Mathf.Lerp(LShoulder2.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[2], step), 0);
RShoulder5.transform.localPosition = new Vector3(Mathf.Lerp(RShoulder5.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[5], step), Mathf.Lerp(RShoulder5.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[5], step), 0);
LElbow3.transform.localPosition = new Vector3(Mathf.Lerp(LElbow3.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[3], step), Mathf.Lerp(LElbow3.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[3], step), 0);
RElbow6.transform.localPosition = new Vector3(Mathf.Lerp(RElbow6.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[6], step), Mathf.Lerp(RElbow6.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[6], step), 0);
LWrist4.transform.localPosition = new Vector3(Mathf.Lerp(LWrist4.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[4], step), Mathf.Lerp(LWrist4.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[4], step), 0);
RWrist7.transform.localPosition = new Vector3(Mathf.Lerp(RWrist7.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[7], step), Mathf.Lerp(RWrist7.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[7], step), 0);
LAss8.transform.localPosition = new Vector3(Mathf.Lerp(LAss8.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[8], step), Mathf.Lerp(LAss8.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[8], step), 0);
RAss11.transform.localPosition = new Vector3(Mathf.Lerp(RAss11.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[11], step), Mathf.Lerp(RAss11.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[11], step), 0);
LKnee9.transform.localPosition = new Vector3(Mathf.Lerp(LKnee9.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[9], step), Mathf.Lerp(LKnee9.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[9], step), 0);
RKnee12.transform.localPosition = new Vector3(Mathf.Lerp(RKnee12.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[12], step), Mathf.Lerp(RKnee12.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[12], step), 0);
LFoot10.transform.localPosition = new Vector3(Mathf.Lerp(LFoot10.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[10], step), Mathf.Lerp(LFoot10.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[10], step), 0);
RFoot13.transform.localPosition = new Vector3(Mathf.Lerp(RFoot13.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[13], step), Mathf.Lerp(RFoot13.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[13], step), 0);
REar17.transform.localPosition = new Vector3(Mathf.Lerp(REar17.transform.localPosition.x, 0.1f * JsonTest.pose_joint_x[17], step), Mathf.Lerp(REar17.transform.localPosition.y, -0.1f * JsonTest.pose_joint_y[17], step), 0);
//it requires 4 lines to connect all the joints
lineRenderer1.SetPosition(0, LEar16.transform.localPosition);
lineRenderer1.SetPosition(1, LEye14.transform.localPosition);
lineRenderer1.SetPosition(2, MNose0.transform.localPosition);
lineRenderer1.SetPosition(3, MMid1.transform.localPosition);
lineRenderer1.SetPosition(4, LShoulder2.transform.localPosition);
lineRenderer1.SetPosition(5, LElbow3.transform.localPosition);
lineRenderer1.SetPosition(6, LWrist4.transform.localPosition);
lineRenderer2.SetPosition(0, REar17.transform.localPosition);
lineRenderer2.SetPosition(1, REye15.transform.localPosition);
lineRenderer2.SetPosition(2, MNose0.transform.localPosition);
lineRenderer2.SetPosition(3, MMid1.transform.localPosition);
lineRenderer2.SetPosition(4, RShoulder5.transform.localPosition);
lineRenderer2.SetPosition(5, RElbow6.transform.localPosition);
lineRenderer2.SetPosition(6, RWrist7.transform.localPosition);
lineRenderer3.SetPosition(0, LFoot10.transform.localPosition);
lineRenderer3.SetPosition(1, LKnee9.transform.localPosition);
lineRenderer3.SetPosition(2, LAss8.transform.localPosition);
lineRenderer3.SetPosition(3, MMid1.transform.localPosition);
lineRenderer4.SetPosition(0, RFoot13.transform.localPosition);
lineRenderer4.SetPosition(1, RKnee12.transform.localPosition);
lineRenderer4.SetPosition(2, RAss11.transform.localPosition);
lineRenderer4.SetPosition(3, MMid1.transform.localPosition);
}
}
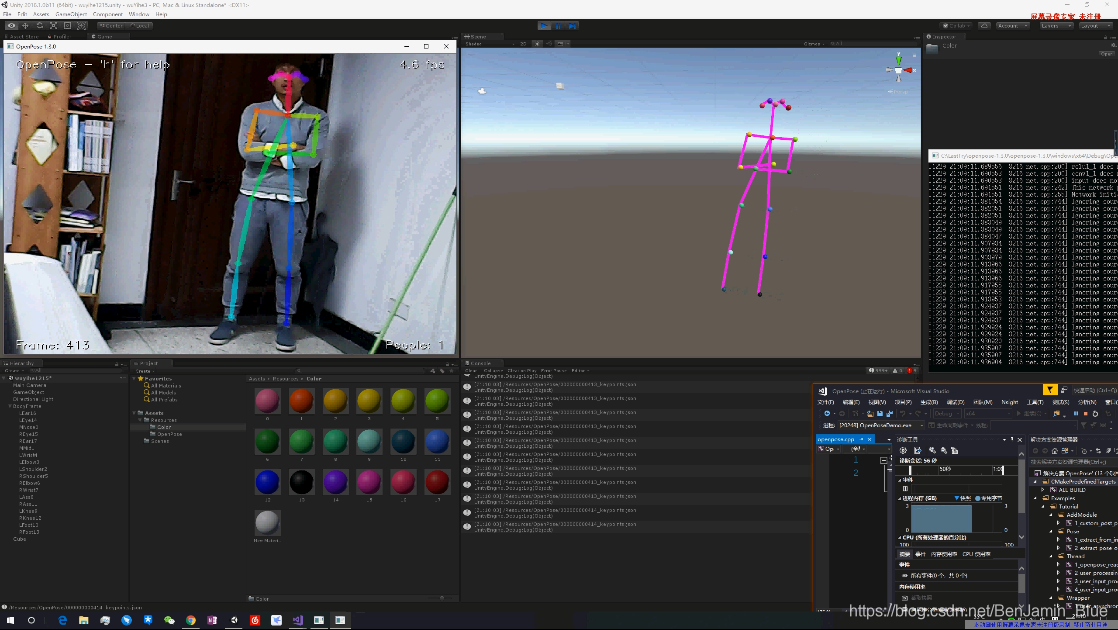
(5) 运行结果
如图所示,该工作可以将OpenPose采集的节点数据实时传递给Unity的模型。
(6) 局限性分析
由于一般的网络摄像头无法获取景深信息,在多人识别的情况下,OpenPose只能输出为2D坐标;但若开启OpenPose的深度测量模式(如图所示),除了需要必要的深度相机外、仅限对于单个对象的识别。
由于笔者认识有限,姑且认为目前目前没有针对多人3D识别的有效开源项目。若有更好的方案,还请诸位给予转告,笔者在此谢过。
