1 可视化odom和全局路径
需求:实现一个功能包,该功能包能在Rviz中可视化车下发的全局路径轨迹和实际车辆行驶轨迹
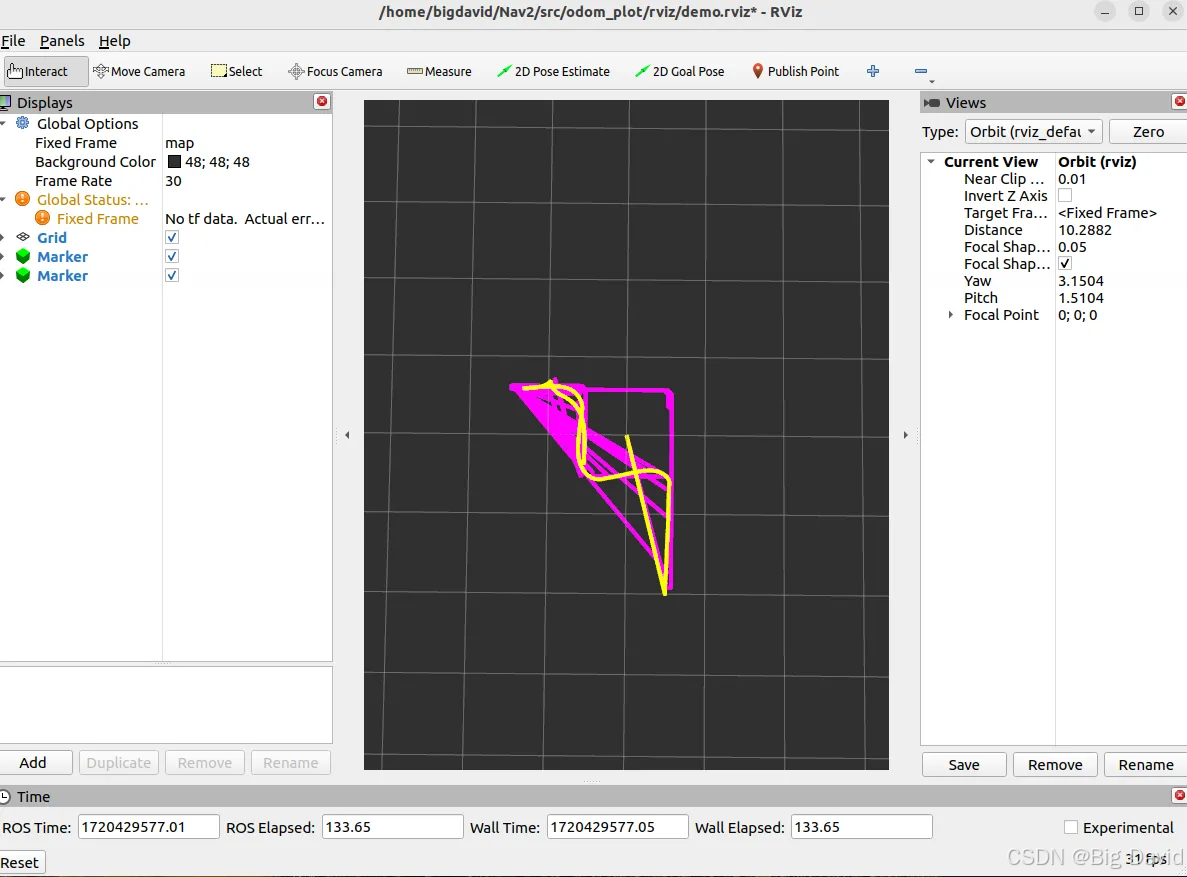
预期效果(已经在仿真和实车上测试过):
2 搭建功能包
在Nav2仿真环境或者实车工程代码里的src里添加odom_plot功能包
ros2 pkg create odom_plot --build-type ament_cmake --dependencies rclcpp std_msgs nav_msgs geometry_msgs visualization_msgs
工程目录如下:
bigdavid@bigdavid-Legion-Y9000P-IRX8:~/Nav2/src/odom_plot$ tree
.
├── CMakeLists.txt
├── include
│ └── odom_plot
├── data
│ ├── global_plan.csv
│ └── odometry_data.csv
├── package.xml
├── rviz
│ └── demo.rviz
├── scripts
│ ├── read.sh
│ ├── rviz.sh
│ └── write.sh
└── src
├── odom_load.cpp
├──