参考:
(1)【具身抓取课程-1】机器人基础
(2)【具身抓取课程-2】深度学习基础
1 机器人基础
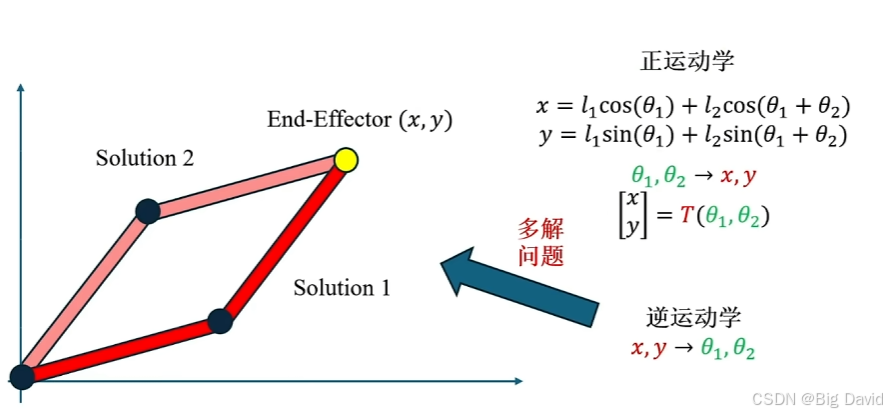
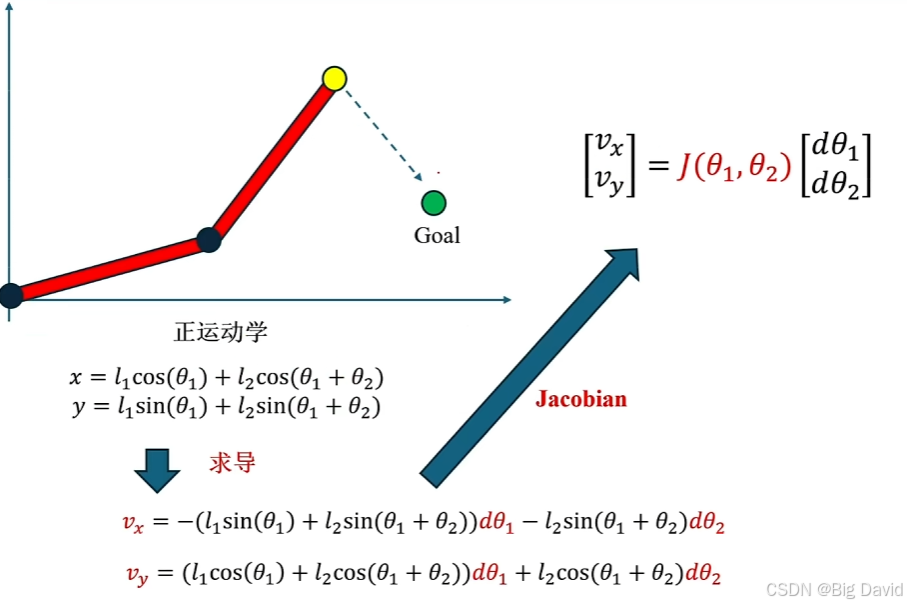
从平面二连杆理解机器人学
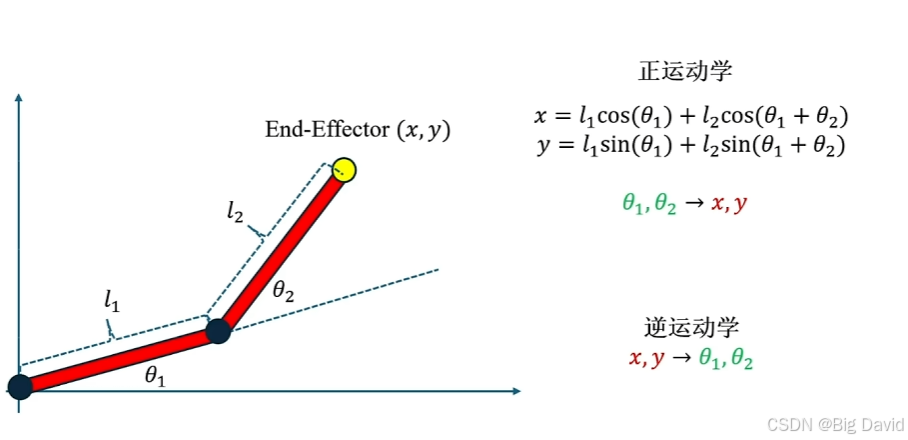
正运动学:从关节角度到末端执行器位置的一个映射
逆运动学:已知末端位置反推角度
逆运动学存在多解问题
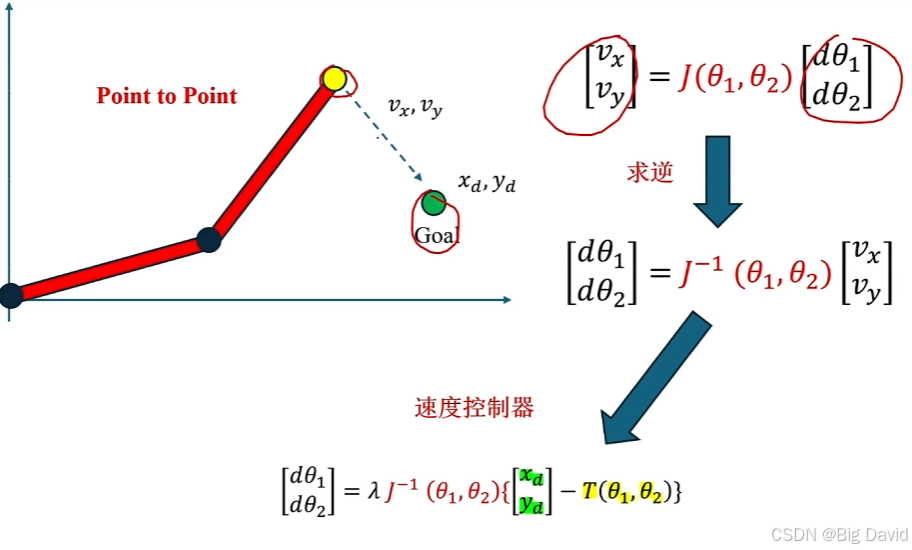
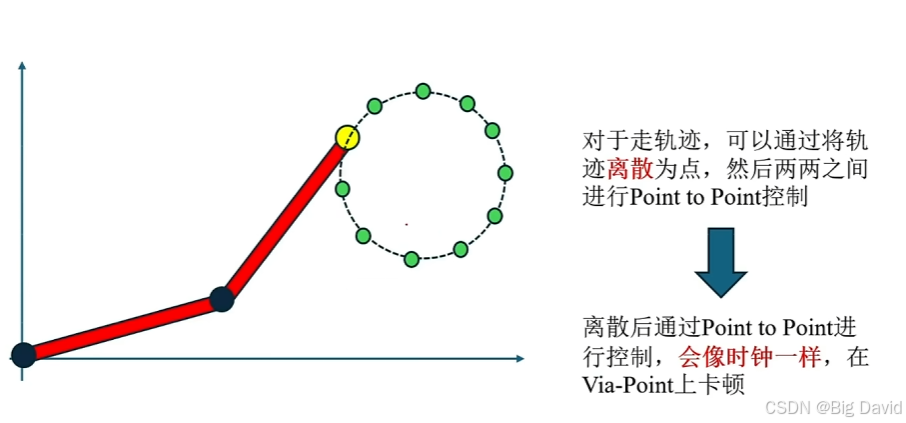
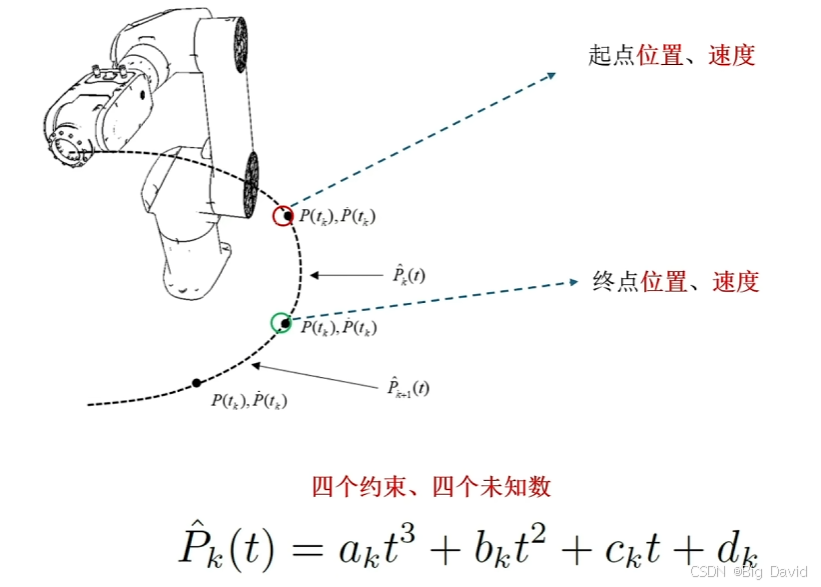
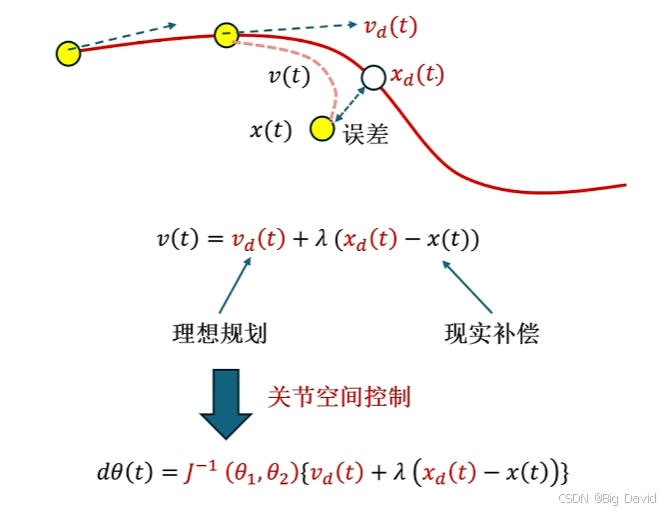
抽象出一个最简单的运动,控制黄点到绿点Goal
2 深度学习基础
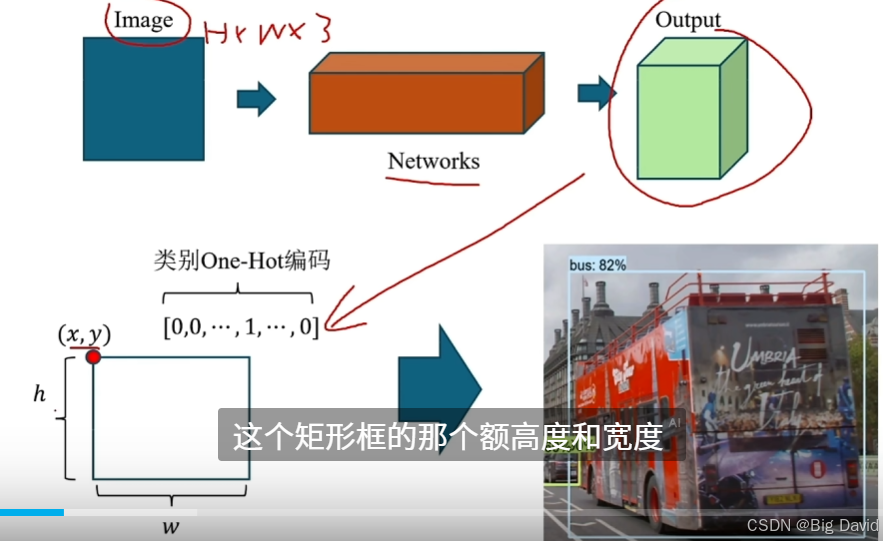
应用一个算法需要了解输入和输出
图像检测:
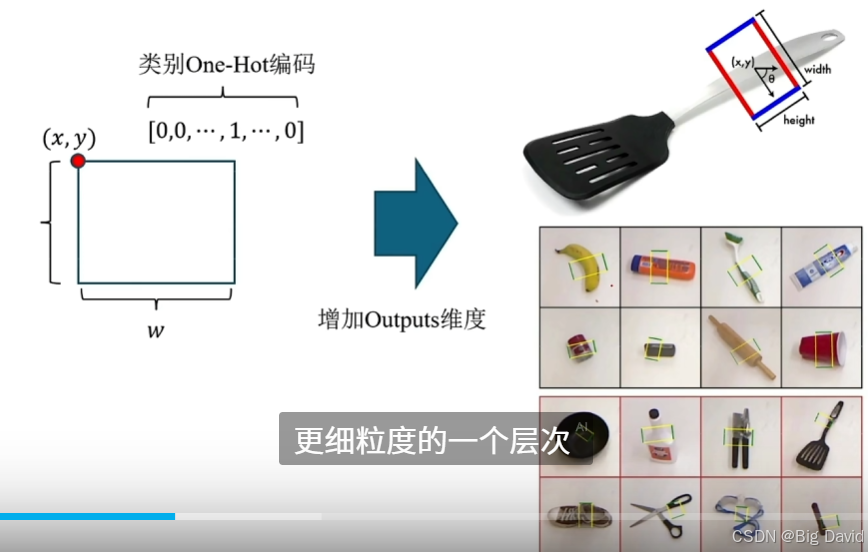
图像检测——>抓取
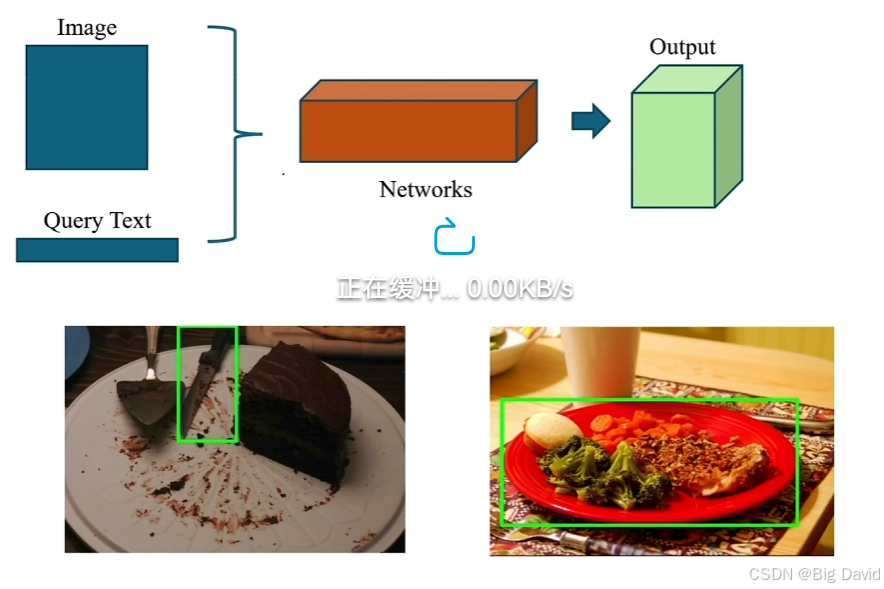
开放词汇检测
图像分割
开放词汇分割
参考:
(1)【具身抓取课程-1】机器人基础
(2)【具身抓取课程-2】深度学习基础
从平面二连杆理解机器人学
正运动学:从关节角度到末端执行器位置的一个映射
逆运动学:已知末端位置反推角度
逆运动学存在多解问题
抽象出一个最简单的运动,控制黄点到绿点Goal
应用一个算法需要了解输入和输出
图像检测:
图像检测——>抓取
开放词汇检测
图像分割
开放词汇分割
道可道,非常道;名可名,非常名。 无名,天地之始,有名,万物之母。 故常无欲,以观其妙,常有欲,以观其徼。 此两者,同出而异名,同谓之玄,玄之又玄,众妙之门。