I. 前言
前面已经写了很多关于时间序列预测的文章:
- 深入理解PyTorch中LSTM的输入和输出(从input输入到Linear输出)
- PyTorch搭建LSTM实现时间序列预测(负荷预测)
- PyTorch中利用LSTMCell搭建多层LSTM实现时间序列预测
- PyTorch搭建LSTM实现多变量时间序列预测(负荷预测)
- PyTorch搭建双向LSTM实现时间序列预测(负荷预测)
- PyTorch搭建LSTM实现多变量多步长时间序列预测(一):直接多输出
- PyTorch搭建LSTM实现多变量多步长时间序列预测(二):单步滚动预测
- PyTorch搭建LSTM实现多变量多步长时间序列预测(三):多模型单步预测
- PyTorch搭建LSTM实现多变量多步长时间序列预测(四):多模型滚动预测
- PyTorch搭建LSTM实现多变量多步长时间序列预测(五):seq2seq
- PyTorch中实现LSTM多步长时间序列预测的几种方法总结(负荷预测)
- PyTorch-LSTM时间序列预测中如何预测真正的未来值
- PyTorch搭建LSTM实现多变量输入多变量输出时间序列预测(多任务学习)
- PyTorch搭建ANN实现时间序列预测(风速预测)
- PyTorch搭建CNN实现时间序列预测(风速预测)
- PyTorch搭建CNN-LSTM混合模型实现多变量多步长时间序列预测(负荷预测)
- PyTorch搭建Transformer实现多变量多步长时间序列预测(负荷预测)
- PyTorch时间序列预测系列文章总结(代码使用方法)
- TensorFlow搭建LSTM实现时间序列预测(负荷预测)
- TensorFlow搭建LSTM实现多变量时间序列预测(负荷预测)
- TensorFlow搭建双向LSTM实现时间序列预测(负荷预测)
- TensorFlow搭建LSTM实现多变量多步长时间序列预测(一):直接多输出
- TensorFlow搭建LSTM实现多变量多步长时间序列预测(二):单步滚动预测
- TensorFlow搭建LSTM实现多变量多步长时间序列预测(三):多模型单步预测
- TensorFlow搭建LSTM实现多变量多步长时间序列预测(四):多模型滚动预测
- TensorFlow搭建LSTM实现多变量多步长时间序列预测(五):seq2seq
- TensorFlow搭建LSTM实现多变量输入多变量输出时间序列预测(多任务学习)
- TensorFlow搭建ANN实现时间序列预测(风速预测)
- TensorFlow搭建CNN实现时间序列预测(风速预测)
- TensorFlow搭建CNN-LSTM混合模型实现多变量多步长时间序列预测(负荷预测)
- PyG搭建图神经网络实现多变量输入多变量输出时间序列预测
- PyTorch搭建GNN-LSTM和LSTM-GNN模型实现多变量输入多变量输出时间序列预测
- PyG Temporal搭建STGCN实现多变量输入多变量输出时间序列预测
- 时序预测中Attention机制是否真的有效?盘点LSTM/RNN中24种Attention机制+效果对比
- 详解Transformer在时序预测中的Encoder和Decoder过程:以负荷预测为例
- (PyTorch)TCN和RNN/LSTM/GRU结合实现时间序列预测
- PyTorch搭建Informer实现长序列时间序列预测
- PyTorch搭建Autoformer实现长序列时间序列预测
- PyTorch搭建GNN(GCN、GraphSAGE和GAT)实现多节点、单节点内多变量输入多变量输出时空预测
前边已经有两篇文章讲解了如何利用PyG搭建GNN以及GNN-LSTM进行时间序列预测,这两部分内容都只是针对多变量进行预测,即将每个变量当成一个节点,然后利用皮尔逊相关系数构建变量间的邻接矩阵。
上述过程有以下两个问题:
(1)不少人使用时不会安装PyG(后台经常有人询问如何安装PyG),这个其实不困难,具体安装命令为:
pip install torch_scatter torch_sparse torch_cluster torch_spline_conv torch-geometric -f https://data.pyg.org/whl/torch-1.10.0+cu113.html
使用时将命令中的torch-1.10.0+cu113.html换成自己的torch版本和CUDA版本即可。
(2)使用PyG有诸多限制,例如PyG中每个节点只能拥有单个变量序列。当然,可以将每个节点的多条变量序列用神经网络或者注意力机制等方式转换为一个变量序列,这里不再细说。
有不少人要求出一期多站点多变量预测,前期由于实习+秋招+毕设缠身,事情较多,所以没来得及写。现在有了一些空闲时间,因此在这篇文章里做一些详细的说明。
II. 数据集说明
本次使用的数据集为交通流量预测领域常见的PEMS系列数据集,包括PEMS03、PEMS04、PEMS07和PEMS08四个数据集。
其中,PEMS04是由307个探测器(节点数)每隔5分钟采集一次数据,共采集59天产生的交通流量数据;PEMS08是由170个探测器每隔5分钟采集一次,共采集62天产生的数据。每个探测器每次采集的数据包含三个维度的特征,分别为:流量、平均速度和平均占有率。因此,数据集的格式应该为一个矩阵,大小为num * num_nodes * 3,其中PSMS04的num=59*24*12=16992,num_nodes=307,而PEMS08的num=62*24*12=17856,num_nodes=170。PEMS03和PEMS07两个数据集中只包含流量这一个变量,二者的的大小分别为26208*358*1进和28224*883*1。
在这篇文章中,使用前2小时的数据预测未来半小时的数据,即历史24个时刻的多个变量预测未来6个时刻的多个变量。
数据处理代码与前面类似:
def nn_seq(args):
seq_len = args.seq_len
batch_size, pred_len = args.batch_size, args.pred_len
root_path = os.path.abspath(os.path.dirname(os.getcwd()))
file_name = args.file_name
data_path = root_path + "/data/" + file_name + "/"
npz = np.load(data_path + file_name + ".npz")
data = npz['data'] # lens num_nodes, in_feats
print(data.shape)
# data = data[:2000]
# 3表示:车流量、平均车速、平均车道占用率
num_nodes = data.shape[1]
# 加载邻接矩阵
adj_data = pd.read_csv(data_path + file_name + ".csv")
adj_data = adj_data[["from", "to"]].values.tolist()
# 找出最大最小值
all_elements = [element for row in adj_data for element in row]
all_elements = list(set(all_elements))
all_elements.sort()
print(len(all_elements) == num_nodes)
node_dict = dict(zip(all_elements, [x for x in range(num_nodes)]))
# print(max_val, min_val)
adj = torch.zeros((num_nodes, num_nodes))
for src, dst in adj_data:
src = node_dict[src]
dst = node_dict[dst]
adj[src, dst] = adj[dst, src] = 1
#
# split
train = data[:int(len(data) * 0.6)]
val = data[int(len(data) * 0.6):int(len(data) * 0.8)]
test = data[int(len(data) * 0.8):]
# 归一化 要求在站点内部,对按照时间列进行归一化
scalers = []
for idx in range(num_nodes):
cur_train = train[:, idx, :]
cur_val = val[:, idx, :]
cur_test = test[:, idx, :]
scaler = MinMaxScaler()
train[:, idx, :] = scaler.fit_transform(cur_train)
val[:, idx, :] = scaler.transform(cur_val)
test[:, idx, :] = scaler.transform(cur_test)
scalers.append(scaler)
def process(dataset, step_size, shuffle):
# dataset: num num_nodes dim
seq = []
for i in tqdm(range(0, len(dataset) - seq_len - pred_len + 1, step_size)):
x = dataset[i:i + seq_len]
y = dataset[i + seq_len:i + seq_len + pred_len]
# tensor
x = torch.FloatTensor(x)
y = torch.FloatTensor(y)
seq.append((x, y))
seq = MyDataset(seq)
seq = DataLoader(dataset=seq, batch_size=batch_size, shuffle=shuffle, num_workers=0, drop_last=False)
return seq
Dtr = process(train, step_size=1, shuffle=True)
Val = process(val, step_size=1, shuffle=True)
Dte = process(test, step_size=pred_len, shuffle=False)
return Dtr, Val, Dte, adj, scalers
归一化时,由于不同站点间的数据没有太大关联,因此需要单独对每个站点内部的数据进行归一化,这里采用了MinMaxSacler归一化。
III. 模型
在这篇文章中将使用常见的三个GNN模型进行预测,即GCN、GraphSAGE和GAT。
图卷积网络(Graph Convolutional Network,GCN)是最早提出的图神经网络之一,GCN通过在图的邻域内进行信息聚合来学习节点的低维表示。具体来说,GCN利用了拉普拉斯矩阵的特征值分解,通过图傅里叶变换将卷积操作转换为频域上的滤波操作。GCN的核心公式为:
h
(
l
+
1
)
=
σ
(
D
~
−
1
2
A
~
D
~
−
1
2
h
(
l
)
W
(
l
)
)
h^{(l+1)} = \sigma(\tilde{D}^{-\frac{1}{2}} \tilde{A} \tilde{D}^{-\frac{1}{2}} h^{(l)} W^{(l)})
h(l+1)=σ(D~−21A~D~−21h(l)W(l))
其中, A ~ \tilde{A} A~是带有自环的邻接矩阵, D ~ \tilde{D} D~是对应的度矩阵, h ( l ) h^{(l)} h(l) 是第 l l l层的隐藏状态, W ( l ) W^{(l)} W(l)是权重矩阵, σ \sigma σ是激活函数。
GraphSAGE是由Hamilton等人在2017年提出的,旨在解决大规模图上的节点表示学习问题。GraphSAGE通过采样节点的邻居,并在局部邻域内进行信息聚合,从而生成节点表示。GraphSAGE支持多种聚合方法,包括 Mean Aggregator、LSTM Aggregator 和 Max Pooling Aggregator。GraphSAGE的核心公式为:
h
i
(
k
+
1
)
=
σ
(
W
f
(
h
i
(
k
)
,
{
h
j
(
k
)
∣
j
∈
N
(
i
)
}
)
)
h_i^{(k+1)} = \sigma(W f(h_i^{(k)}, \{h_j^{(k)} | j \in \mathcal{N}(i)\}))
hi(k+1)=σ(Wf(hi(k),{hj(k)∣j∈N(i)}))
其中 h i ( k ) h_i^{(k)} hi(k)是第 k k k层节点 i i i的隐藏状态, N ( i ) \mathcal{N}(i) N(i)是节点 i i i的邻居集合, f f f是聚合函数。GraphSAGE通过多层聚合操作,能够有效地捕捉节点的局部结构信息。
图注意力网络GAT(Graph Attention Networks)通过整合注意力机制实现了对图中不同邻居节点的动态加权。其主要创新之处在于,为每个邻接节点分配一个注意力得分,从而使模型可以聚焦于那些更为重要的邻近节点。GAT的核心公式为:
h
i
(
l
+
1
)
=
σ
(
∑
j
∈
N
(
i
)
α
i
j
W
h
j
(
l
)
)
h_i^{(l+1)} = \sigma \left( \sum_{j \in \mathcal{N}(i)} \alpha_{ij} W h_j^{(l)} \right)
hi(l+1)=σ
j∈N(i)∑αijWhj(l)
其中 α i j \alpha_{ij} αij是节点 i i i和 j j j之间的注意力分数, W W W是权重矩阵。GAT通过自注意力机制,能够更好地捕捉节点之间的关系。
上述三种模型的原理十分简单,下边将依次介绍如何使用三种模型进行多站点、多变量输入、多变量输出的时空预测。
在进行模型讲解之前,先规定一下模型的输入和输出维度。在本文中,模型的输入尺寸为:batch_size * seq_len * num_nodes * in_feats,表示每个站点的多变量历史数据,输出为batch_size * pred_len * num_nodes * in_feats,表示多个站点未来的多变量数据。
3.1 GCN
GCN的代码实现十分优雅简洁,可以先看一下原作者的代码实现:
class GraphConvolution(Module):
"""
Simple GCN layer, similar to https://arxiv.org/abs/1609.02907
"""
def __init__(self, in_features, out_features, bias=True):
super(GraphConvolution, self).__init__()
self.in_features = in_features
self.out_features = out_features
self.weight = Parameter(torch.FloatTensor(in_features, out_features))
if bias:
self.bias = Parameter(torch.FloatTensor(out_features))
else:
self.register_parameter('bias', None)
self.reset_parameters()
def reset_parameters(self):
stdv = 1. / math.sqrt(self.weight.size(1))
self.weight.data.uniform_(-stdv, stdv)
if self.bias is not None:
self.bias.data.uniform_(-stdv, stdv)
def forward(self, input, adj):
support = torch.mm(input, self.weight
output = torch.spmm(adj, support)
if self.bias is not None:
return output + self.bias
else:
return output
def __repr__(self):
return self.__class__.__name__ + ' (' \
+ str(self.in_features) + ' -> ' \
+ str(self.out_features) + ')'
可以看到,GCN的本质就是将归一化后的邻接矩阵和节点特征矩阵执行矩阵乘法,即(num_nodes, num_nodes) * (num_nodes, feats) -> (num_nodes, feats)。
因此,对于大小为batch_size * seq_len * num_nodes * in_feats的输入,可以直接对后两个维度进行计算。代码如下:
class GCNConv(nn.Module):
def __init__(self, in_features, out_features, bias=True):
super(GCNConv, self).__init__()
self.in_features = in_features
self.out_features = out_features
self.weight = Parameter(torch.FloatTensor(in_features, out_features))
if bias:
self.bias = Parameter(torch.FloatTensor(out_features))
else:
self.register_parameter('bias', None)
self.reset_parameters()
def reset_parameters(self):
stdv = 1. / math.sqrt(self.weight.size(1))
self.weight.data.uniform_(-stdv, stdv)
if self.bias is not None:
self.bias.data.uniform_(-stdv, stdv)
def forward(self, x, adj):
support = torch.matmul(x, self.weight)
# 输入的数据是x = b s n d, adj = n * n
output = torch.einsum("tn,bsnd->bstd", adj, support) # bsnd
if self.bias is not None:
output + self.bias
return output
具体来讲,首先将batch_size * seq_len * num_nodes * in_feats利用self.weight变成batch_size * seq_len * num_nodes * out_feats,然后再与归一化后的邻接矩阵相乘,这里用到了torch.einsum()函数来指定参与计算的维度。
接着,便可以基于GCNConv来定义用于多站点。多变量输入、多变量输出的时刻预测GCN模型:
class GCN(torch.nn.Module):
def __init__(self, args):
super(GCN, self).__init__()
self.args = args
self.conv1 = GCNConv(args.in_feats, args.h_feats)
self.conv2 = GCNConv(args.h_feats, args.out_feats)
self.dropout = 0.5
self.fcs = nn.ModuleList()
for _ in range(args.in_feats):
self.fcs.append(
nn.Sequential(
nn.Linear(args.seq_len * args.out_feats, args.out_feats),
nn.ReLU(),
nn.Linear(args.out_feats, args.pred_len)
)
)
def forward(self, x, adj):
# bsnd
x = F.dropout(x, self.dropout, training=self.training)
x = F.elu(self.conv1(x, adj))
x = self.conv2(x, adj)
# b s n d --> b s n 3
x = x.permute(0, 2, 1, 3) # bnsd
x = torch.flatten(x, start_dim=2) # bn s*d
pred = []
for idx in range(self.args.in_feats):
sub_pred = self.fcs[idx](x) # b n pred_len
pred.append(sub_pred) # b pred_len 3
pred = torch.stack(pred, dim=-1) # b n pred_len 3
# 变成和y一样的维度,即b pred_len num_node 3
pred = pred.permute(0, 2, 1, 3)
return pred
该模型由2个GCN层和一个预测层组成。输入batch_size * seq_len * num_nodes * in_feats(以下简称bsni)经过两层GCN变成bsno。接着,为了预测所有站点的多个变量,采用多任务学习中的思路,每个变量使用一个线性层进行预测。
预测时,首先将bsno的进行维度交换变成bnso,与LSTM等模型类似,可以将所有时刻的隐状态展开变成一个bn(s*d),然后使用多个线性层得到多个bn(pred_len),然后将多个变量的预测值拼接变成bn(pred_len)(in_feats)。最后,为了与真实值的batch_size * pred_len * num_nodes * in_feats相匹配,需要交换1和2两个维度。
需要注意的是,forward中传入的邻接矩阵是归一化后的邻接矩阵,归一化操作可以参考如下代码:
def normalize_adj(adj):
"""
归一化邻接矩阵,适用于图卷积网络(GCN)。
:param adj: 原始邻接矩阵,形状为 (N, N)
:return: 归一化后的邻接矩阵,形状为 (N, N)
"""
# 添加自环
adj = adj + torch.eye(adj.size(0))
# 计算度矩阵 D
degree = adj.sum(1)
# 计算 D 的逆平方根
d_inv_sqrt = torch.pow(degree, -0.5)
d_inv_sqrt[torch.isinf(d_inv_sqrt)] = 0 # 防止出现无穷大
# 构建 D 的逆平方根矩阵
d_mat_inv_sqrt = torch.diag(d_inv_sqrt)
# 归一化邻接矩阵
adj_normalized = d_mat_inv_sqrt @ adj @ d_mat_inv_sqrt
return adj_normalized
3.2 GraphSAGE
GraphSAGE的本质是将一个节点的邻居节点聚合后再与自身进行拼接变换,单层代码实现如下:
class SAGEConv(nn.Module):
def __init__(self, in_features, out_features):
super(SAGEConv, self).__init__()
self.in_features = in_features
self.out_features = out_features
self.proj = nn.Linear(in_features, out_features)
self.out_proj = nn.Linear(2 * out_features, out_features)
def forward(self, x, adj):
# 假设有多个站点
support = self.proj(x)
# 输入的数据是x = b s n d, adj = n * n
# 邻居平均 设定一个很小的正数eps
eps = torch.tensor(1e-8)
# 计算每一行的和,并确保不会除以零
row_sums = adj.sum(dim=1, keepdim=True)
row_sums = torch.max(row_sums, eps)
# 对每一行进行规范化
normalized_adj = adj / row_sums
output = torch.einsum("tn,bsnd->bstd", normalized_adj, support) # bsnd
# cat
cat_x = torch.cat((support, output), dim=-1) # bsn 2d
z = self.out_proj(cat_x)
# norm
z_norm = z.norm(p=2, dim=-1, keepdim=True)
z_norm = torch.where(z_norm == 0, torch.tensor(1.).to(z_norm), z_norm)
z = z / z_norm
return z
上述代码采用的是平均聚合。与GCN类似,可以搭建GraphSAGE如下:
class GraphSAGE(torch.nn.Module):
def __init__(self, args):
super(GraphSAGE, self).__init__()
self.args = args
self.conv1 = SAGEConv(args.in_feats, args.h_feats)
self.conv2 = SAGEConv(args.h_feats, args.out_feats)
self.dropout = 0.5
self.fcs = nn.ModuleList()
for _ in range(args.in_feats):
self.fcs.append(
nn.Sequential(
nn.Linear(args.seq_len * args.out_feats, args.out_feats),
nn.ReLU(),
nn.Linear(args.out_feats, args.pred_len)
)
)
def forward(self, x, adj):
# bsnd
# x = F.dropout(x, self.dropout, training=self.training)
x = F.relu(self.conv1(x, adj))
x = self.conv2(x, adj)
# b s n d --> b s n 3
x = x.permute(0, 2, 1, 3) # bnsd
x = torch.flatten(x, start_dim=2) # bn s*d
pred = []
for idx in range(self.args.in_feats):
sub_pred = self.fcs[idx](x) # b n pred_len
pred.append(sub_pred) # b pred_len 3
pred = torch.stack(pred, dim=-1) # b n pred_len 3
pred = pred.permute(0, 2, 1, 3)
return pred
3.3 GAT
GAT的代码稍显复杂,其本质是将节点的特征和邻居特征进行拼接然后变换得到这条边上的权重,最后再对邻居的特征进行加权。这里可以先参考一下GitHub上的GAT代码:
class GraphAttentionLayer(nn.Module):
"""
Simple GAT layer, similar to https://arxiv.org/abs/1710.10903
"""
def __init__(self, in_features, out_features, dropout, alpha, concat=True):
super(GraphAttentionLayer, self).__init__()
self.dropout = dropout
self.in_features = in_features
self.out_features = out_features
self.alpha = alpha
self.concat = concat
self.W = nn.Parameter(torch.empty(size=(in_features, out_features)))
nn.init.xavier_uniform_(self.W.data, gain=1.414)
self.a = nn.Parameter(torch.empty(size=(2*out_features, 1)))
nn.init.xavier_uniform_(self.a.data, gain=1.414)
self.leakyrelu = nn.LeakyReLU(self.alpha)
def forward(self, h, adj):
Wh = torch.mm(h, self.W) # h.shape: (N, in_features), Wh.shape: (N, out_features)
e = self._prepare_attentional_mechanism_input(Wh)
zero_vec = -9e15*torch.ones_like(e)
attention = torch.where(adj > 0, e, zero_vec)
attention = F.softmax(attention, dim=1)
attention = F.dropout(attention, self.dropout, training=self.training)
h_prime = torch.matmul(attention, Wh)
if self.concat:
return F.elu(h_prime)
else:
return h_prime
def _prepare_attentional_mechanism_input(self, Wh):
# Wh.shape (N, out_feature)
# self.a.shape (2 * out_feature, 1)
# Wh1&2.shape (N, 1)
# e.shape (N, N)
Wh1 = torch.matmul(Wh, self.a[:self.out_features, :])
Wh2 = torch.matmul(Wh, self.a[self.out_features:, :])
# broadcast add
e = Wh1 + Wh2.T
return self.leakyrelu(e)
def __repr__(self):
return self.__class__.__name__ + ' (' + str(self.in_features) + ' -> ' + str(self.out_features) + ')'
上述代码使用了broadcast add技巧来得到每个节点与其他所有节点的权重,然后再使用adj来将不存在边的权重变成一个很小的负数。
基于上述思想,可以将本文的图注意力层定义如下:
class GraphAttentionLayer(nn.Module):
def __init__(self, in_features, out_features, dropout, alpha, concat=True):
super(GraphAttentionLayer, self).__init__()
self.dropout = dropout
self.in_features = in_features
self.out_features = out_features
self.alpha = alpha
self.concat = concat
self.W = nn.Parameter(torch.empty(size=(in_features, out_features)))
nn.init.xavier_uniform_(self.W.data, gain=1.414)
self.a = nn.Parameter(torch.empty(size=(2*out_features, 1)))
nn.init.xavier_uniform_(self.a.data, gain=1.414)
self.leakyrelu = nn.LeakyReLU(self.alpha)
def forward(self, h, adj):
# bsnd nn
Wh = torch.matmul(h, self.W)
e = self._prepare_attentional_mechanism_input(Wh) # bsnn
# 掩码操作
mask = (adj == 0)
# 广播掩码矩阵
mask = mask.unsqueeze(0).unsqueeze(0)
mask = mask.expand_as(e)
# 应用掩码
e[mask] = -9e15
e = F.softmax(e, dim=1)
e = F.dropout(e, self.dropout, training=self.training)
h_prime = torch.einsum("bstn,bsnd->bstd", e, Wh) # bsnd
if self.concat:
return F.elu(h_prime)
else:
return h_prime
def _prepare_attentional_mechanism_input(self, Wh):
# Wh.shape (bsz, seq_len, N, out_feature)
# self.a.shape (2 * out_feature, 1)
# Wh1&2.shape (N, 1)
# e.shape (bsz, seq_len, N, N)
Wh1 = torch.matmul(Wh, self.a[:self.out_features, :])
Wh2 = torch.matmul(Wh, self.a[self.out_features:, :])
# broadcast add
# 只是最后两个维度相加
e = Wh1 + Wh2.permute(0, 1, 3, 2)
return self.leakyrelu(e)
def __repr__(self):
return self.__class__.__name__ + ' (' + str(self.in_features) + ' -> ' + str(self.out_features) + ')'
区别在于:
- 其一,执行broadcast add时候,只是后两个维度进行操作(
e = Wh1 + Wh2.permute(0, 1, 3, 2)),即bsnd+bsdn。 - 得到attention矩阵大小为bsnn,而不是二维的nn。因此,同样需要进行广播来实现掩码操作。
最后,基于GATConv,可以搭建一个简易版本(不使用多头注意力机制)的GAT如下:
class GAT(torch.nn.Module):
def __init__(self, args):
super(GAT, self).__init__()
self.args = args
alpha = 0.2
self.dropout = args.dropout
self.conv1 = GraphAttentionLayer(
args.in_feats,
args.h_feats,
dropout=self.dropout, alpha=alpha, concat=False
)
self.conv2 = GraphAttentionLayer(
args.h_feats,
args.out_feats,
dropout=self.dropout, alpha=alpha, concat=False
)
self.fcs = nn.ModuleList()
for _ in range(args.in_feats):
self.fcs.append(
nn.Sequential(
nn.Linear(args.seq_len * args.out_feats, args.out_feats),
nn.ReLU(),
nn.Linear(args.out_feats, args.pred_len)
)
)
def forward(self, x, adj):
# bsnd
x = F.dropout(x, self.dropout, training=self.training)
x = F.elu(self.conv1(x, adj))
x = self.conv2(x, adj)
# b s n d --> b s n 3
x = x.permute(0, 2, 1, 3) # bnsd
x = torch.flatten(x, start_dim=2) # bn s*d
pred = []
for idx in range(self.args.in_feats):
sub_pred = self.fcs[idx](x) # b n pred_len
pred.append(sub_pred) # b pred_len 3
pred = torch.stack(pred, dim=-1) # b n pred_len 3
# 变成和y一样的维度,即b pred_len num_node 3
pred = pred.permute(0, 2, 1, 3)
return pred
当然,也可以使用多头注意力机制:
class GAT(nn.Module):
def __init__(self, args):
super(GAT, self).__init__()
self.args = args
self.dropout = args.dropout
alpha = 0.2
self.attentions = nn.ModuleList()
for _ in range(args.heads):
layer = GraphAttentionLayer(args.in_feats, args.h_feats, dropout=self.dropout, alpha=alpha, concat=True)
self.attentions.append(layer)
self.out_att = GraphAttentionLayer(
args.h_feats * args.heads,
args.out_feats,
dropout=self.dropout, alpha=alpha, concat=False
)
# fc
self.fcs = nn.ModuleList()
for _ in range(args.in_feats):
self.fcs.append(
nn.Sequential(
nn.Linear(args.seq_len * args.out_feats, args.out_feats),
nn.ReLU(),
nn.Linear(args.out_feats, args.pred_len)
)
)
def forward(self, x, adj):
x = F.dropout(x, self.dropout, training=self.training)
x = torch.cat([att(x, adj) for att in self.attentions], dim=-1)
x = F.dropout(x, self.dropout, training=self.training)
x = self.out_att(x, adj)
# b s n d --> b s n 3
x = x.permute(0, 2, 1, 3) # bnsd
x = torch.flatten(x, start_dim=2) # bn s*d
pred = []
for idx in range(self.args.in_feats):
sub_pred = self.fcs[idx](x) # b n pred_len
pred.append(sub_pred) # b pred_len 3
pred = torch.stack(pred, dim=-1) # b n pred_len 3
pred = pred.permute(0, 2, 1, 3)
return pred
IV. 训练与测试
训练测试代码与之前差不太多,训练函数定义如下:
def train(args, Dtr, Val, adj, path, model_type):
if model_type == "gcn":
adj = normalize_adj(adj)
model = GCN(args).to(device)
elif model_type == "sage":
model = GraphSAGE(args).to(device)
elif model_type == "gat":
model = GAT(args).to(device)
else:
raise ValueError("model_type has to be one of ('gcn', 'sage', 'gat')")
adj = adj.to(device)
loss_function = nn.MSELoss().to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=args.lr,
weight_decay=args.weight_decay)
scheduler = StepLR(optimizer, step_size=args.step_size, gamma=args.gamma)
# training
min_epochs = 2
best_model = None
min_val_loss = np.Inf
for epoch in tqdm(range(args.epochs)):
model.train()
train_loss = []
for (seq, label) in Dtr:
optimizer.zero_grad()
seq = seq.to(device)
label = label.to(device) # b pred_len num_node 3
pred = model(seq, adj) # b pred_len num_node 3
# print(label.shape, pred.shape)
loss = loss_function(pred, label)
loss.backward()
optimizer.step()
train_loss.append(loss.item())
scheduler.step()
# validation
val_loss = get_val_loss(args, model, Val, adj)
if epoch + 1 >= min_epochs and val_loss < min_val_loss:
min_val_loss = val_loss
best_model = copy.deepcopy(model)
state = {'model': best_model.state_dict()}
torch.save(state, path + '/models/' + model_type + '.pkl')
print('epoch {:03d} train_loss {:.8f} val_loss {:.8f}'.format(epoch, np.mean(train_loss), val_loss))
state = {'model': best_model.state_dict()}
torch.save(state, path + '/models/' + model_type + '.pkl')
测试代码:
@torch.no_grad()
def test(args, Dte, adj, path, model_type, scalers):
if model_type == "gcn":
adj = normalize_adj(adj)
model = GCN(args).to(device)
elif model_type == "sage":
model = GraphSAGE(args).to(device)
elif model_type == "gat":
model = GAT(args).to(device)
else:
raise ValueError("model_type has to be one of ('gcn', 'sage', 'gat')")
model.load_state_dict(torch.load(path + '/models/' + model_type + '.pkl')['model'])
adj = adj.to(device)
y, pred = [], []
for seq, label in Dte:
seq = seq.to(device)
y.append(label)
sub_pred = model(seq, adj) # b pred_len num_node 3
pred.append(sub_pred.cpu())
#
y = torch.concat(y, dim=0)
y = y.view(-1, y.size(2), y.size(3)).numpy()
pred = torch.concat(pred, dim=0) # num num_node 3
pred = pred.view(-1, pred.size(2), pred.size(3)).numpy()
# flatten
# scaler
for idx in range(y.shape[1]):
y[:, idx, :] = scalers[idx].inverse_transform(y[:, idx, :])
pred[:, idx, :] = scalers[idx].inverse_transform(pred[:, idx, :])
for idx in range(y.shape[1]):
cur_y, cur_pred = y[:, idx, :], pred[:, idx, :]
# 输出各种指标
print('第{}个站点的指标为:'.format(idx + 1))
maes, mses, rmses, mapes, r2s = get_metric(cur_y, cur_pred)
print('mae:', maes)
print('mse', mses)
print('rmse:', rmses)
print('mape:', mapes)
print('r2:', r2s)
# plot
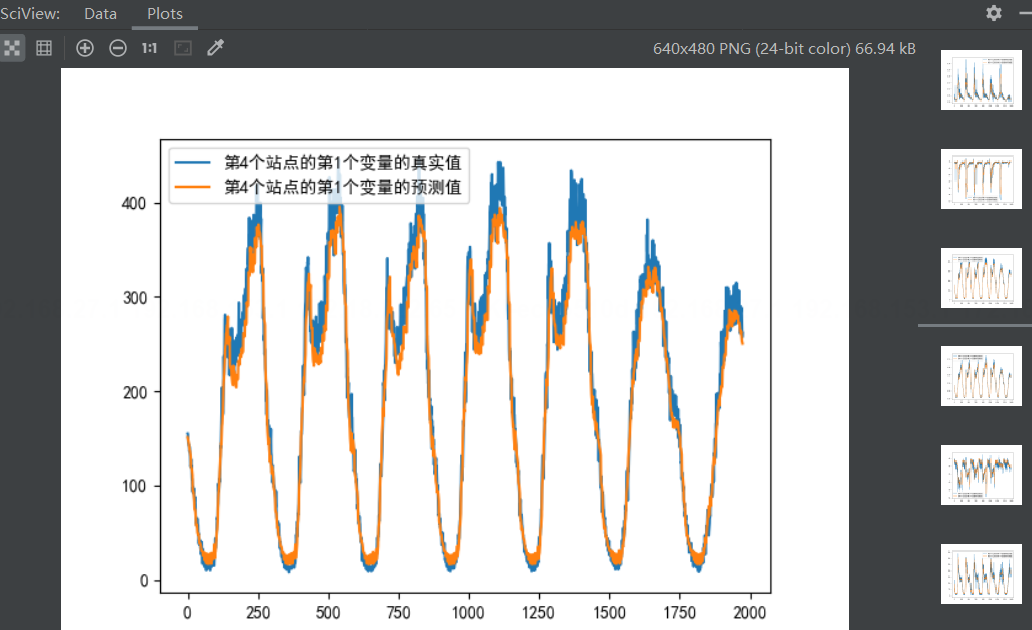
for i in range(cur_y.shape[1]):
plt.plot(cur_y[:, i], label="第{}个站点的第{}个变量的真实值".format(idx + 1, i + 1))
plt.plot(cur_pred[:, i], label="第{}个站点的第{}个变量的预测值".format(idx + 1, i + 1))
plt.legend()
plt.show()
测试反归一化时注意在站点内进行归一化。
V. 实验结果
以PEMS04为例,下图展示了一些预测结果: