基于FPGA的CAN通信,FPGA驱动SJA1000T芯片代码,实现标准帧与扩展帧的通信驱动,已上板调通,价格美丽,欢迎咨询。
品牌型号 CAN SJA1000T
与世面上的不同,代码不是SJA1000T芯片代码,而是驱动该芯片的代码。
ID:36100649782444620
秀不起来的亚索TAT
基于FPGA的CAN通信是目前广泛应用于工业控制、汽车电子等领域的一种通信技术。CAN(Controller Area Network)是一种串行通信协议,它使用差分信号传输、基于事件驱动的通信方式,具有高可靠性、实时性和抗干扰能力强的特点。而FPGA(Field Programmable Gate Array)是一种可编程逻辑器件,通过编程可以实现不同的硬件功能。CAN SJA1000T是一种常用的CAN控制器芯片,它与FPGA结合使用可以实现CAN通信功能。
CAN SJA1000T芯片驱动代码的编写是实现CAN通信的关键步骤之一。与一般的SJA1000T芯片代码不同,驱动该芯片的代码需要充分考虑FPGA的特性和功能,通过与FPGA的硬件逻辑连接,实现对CAN SJA1000T芯片的控制和通信功能。
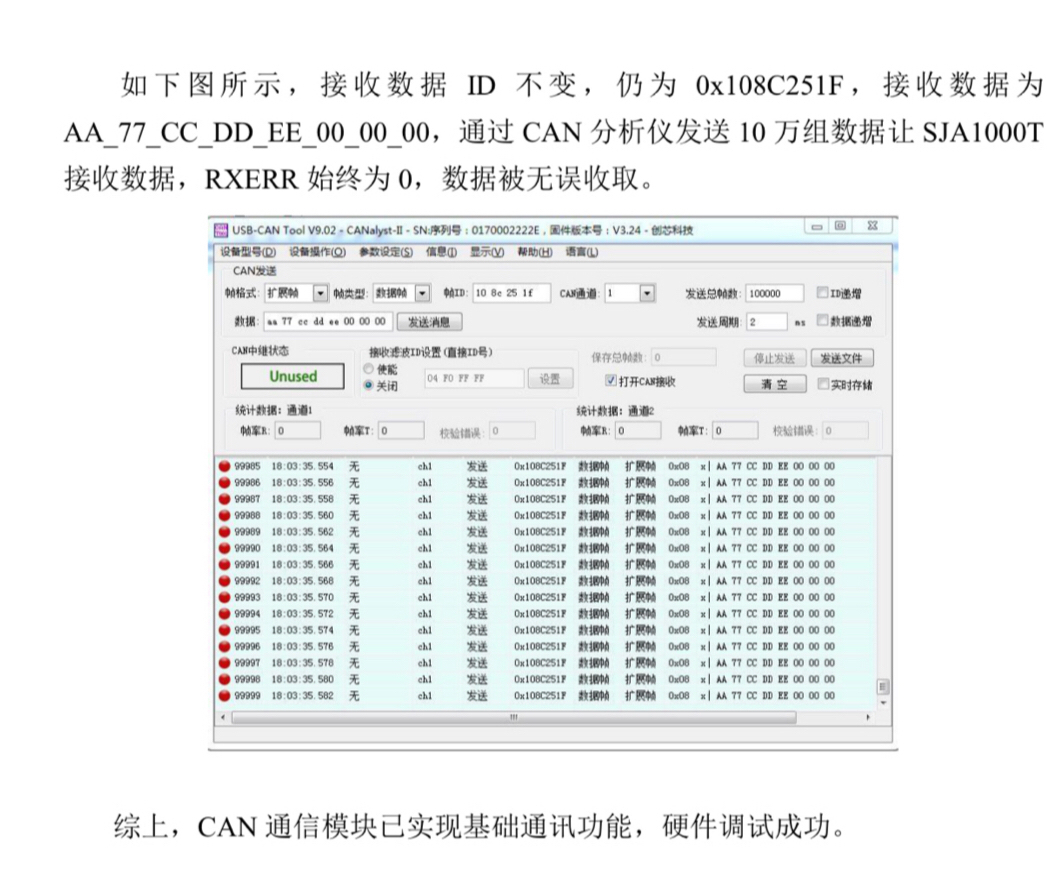
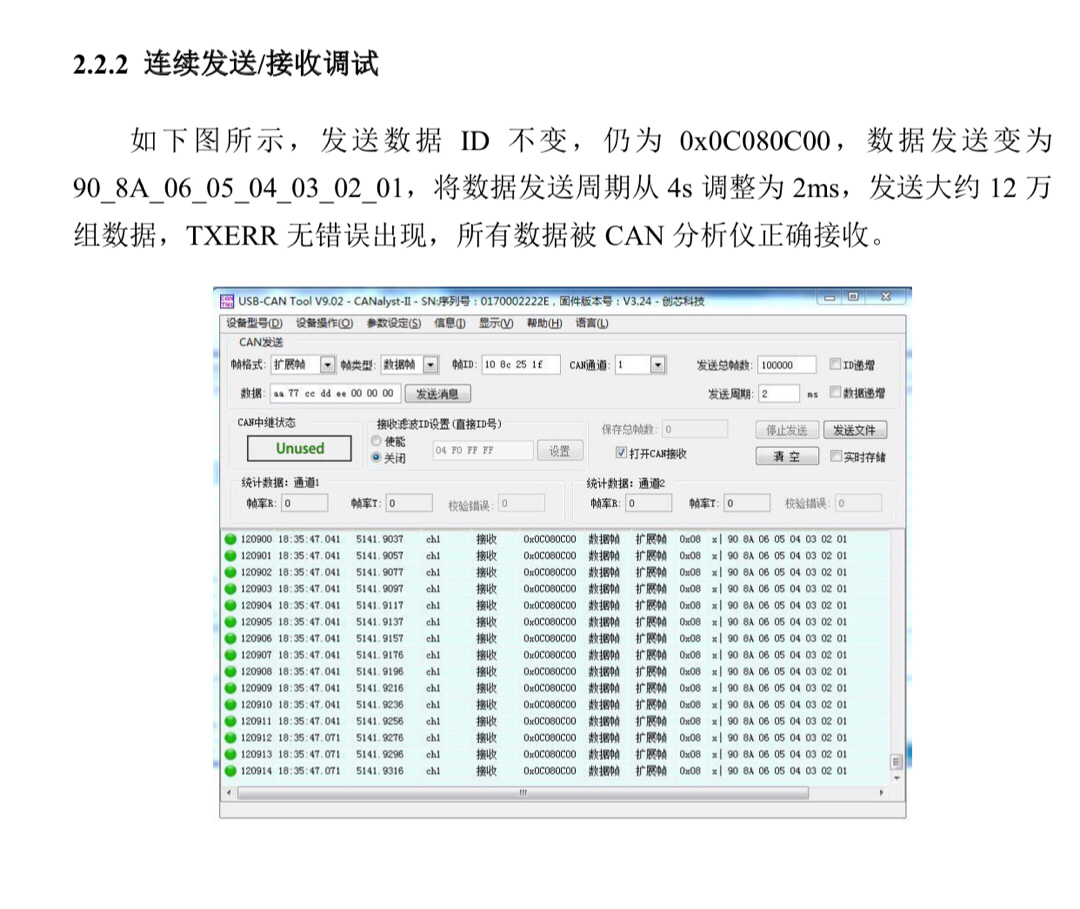
在实现标准帧与扩展帧的通信驱动时,我们首先需要了解CAN通信的标准帧和扩展帧的格式和协议。通常情况下,标准帧由一个11位的标识符和8字节的数据组成,而扩展帧则由一个29位的标识符和8字节的数据组成。通过对CAN SJA1000T芯片的配置和控制,我们可以实现对不同类型帧的接收和发送。
针对CAN SJA1000T芯片的驱动代码编写,我们需要考虑以下几个方面:
-
硬件资源的配置:在FPGA中,我们需要为CAN SJA1000T芯片分配适当的引脚连接和时钟资源。通过对引脚管脚的配置和时钟信号的控制,我们可以实现与CAN SJA1000T芯片的通信。
-
寄存器的配置:CAN SJA1000T芯片内部具有一些寄存器,用于配置和控制CAN通信的参数。通过对这些寄存器的配置,我们可以设置CAN通信的波特率、过滤器、接收缓冲区等参数。
-
接收和发送的控制:在CAN通信中,接收和发送的控制是非常重要的。通过对CAN SJA1000T芯片的控制,我们可以实现对接收和发送的使能和禁用,以及相关的错误处理和状态监测。
基于以上几个方面,我们可以编写出基于FPGA的CAN SJA1000T芯片驱动代码。该代码可以实现CAN通信的初始化、配置和控制,以及对标准帧和扩展帧的接收和发送。在编写代码时,我们需要充分考虑硬件资源的分配和配置,以及CAN通信的协议和规范。
已经上板调通的FPGA驱动SJA1000T芯片代码是一个具有实际应用价值的成果。通过该代码的实现,可以在工业控制和汽车电子等领域中实现CAN通信功能的应用。在实际应用中,可以根据具体的需求和场景,对驱动代码进行相应的修改和优化,以实现更高效、稳定的CAN通信功能。
综上所述,基于FPGA的CAN通信驱动SJA1000T芯片代码的实现对于实现CAN通信功能具有重要意义。通过编写和优化驱动代码,我们可以实现CAN通信的配置和控制,实现对标准帧和扩展帧的接收和发送。在实际应用中,可以根据具体的需求进行相应的修改和优化,以满足不同场景的要求。这对于工业控制、汽车电子等领域来说,具有重要的应用价值。
相关的代码,程序地址如下:http://nodep.cn/649782444620.html