接着上一篇文章。
ORB_SLAM3版本:https://github.com/electech6/ORB_SLAM3_detailed_comments
ros2 ORB_SLAM3程序:https://github.com/zang09/ORB_SLAM3_ROS2
1 编译非ROS2 ORB_SLAM3
这里不在多说,参考我上一篇文章
2 编译ROS2 ORB_SLAM3
1.这里直接把下载的ORB_SLAM3_ROS2放进刚编译好的ORB_SLAM3_detailed_comments(我重命名为ORB_SLAM3)文件夹中
#include <iostream>
#include <algorithm>
#include <fstream>
#include <chrono>
#include <unistd.h>
#include <time.h>
#include "rclcpp/rclcpp.hpp"
#include <cv_bridge/cv_bridge.h>
#include "sensor_msgs/msg/image.hpp"
#include "sensor_msgs/msg/imu.hpp"
#include "MapPoint.h"
#include <opencv2/highgui/highgui_c.h>
#include <opencv2/highgui/highgui.hpp>
#include <Eigen/Dense>
#include <opencv2/core/eigen.hpp>
#include <Converter.h>
#include "System.h"
#include "Frame.h"
#include "Map.h"
#include "Tracking.h"
#include <opencv2/core/core.hpp>
#include "utility.hpp"
using namespace std;
using std::placeholders::_1;
using ImageMsg = sensor_msgs::msg::Image;
using ImuMsg = sensor_msgs::msg::Imu;
class MonoInertialNode : public rclcpp::Node
{
public:
MonoInertialNode(ORB_SLAM3::System* pSLAM, const string &strDoEqual);
~MonoInertialNode();
private:
void GrabImu(const ImuMsg::SharedPtr msg);
void GrabImage(const sensor_msgs::msg::Image::SharedPtr msg0);
cv::Mat GetImage(const ImageMsg::SharedPtr msg);
void SyncWithImu();
ORB_SLAM3::System* m_SLAM;
rclcpp::Subscription<ImuMsg>::SharedPtr subImu_;
rclcpp::Subscription<ImageMsg>::SharedPtr subImage0_;//m_image_subscriber;
std::thread *syncThread_;
// IMU
queue<ImuMsg::SharedPtr> imuBuf_;
std::mutex bufMutex_;
// Image
queue<ImageMsg::SharedPtr> image0Buf_;
std::mutex bufMutex0_;
bool doEqual_;
bool bClahe_;
cv::Ptr<cv::CLAHE> clahe_ = cv::createCLAHE(3.0, cv::Size(8, 8));
};
MonoInertialNode::MonoInertialNode(ORB_SLAM3::System* pSLAM, const string &strDoEqual)
: Node("ORB_SLAM3_ROS2"),m_SLAM(pSLAM)
{
stringstream ss_eq(strDoEqual);
ss_eq >> boolalpha >> doEqual_;
bClahe_ = doEqual_;
std::cout << "Equal: " << doEqual_ << std::endl;
subImu_ = this->create_subscription<ImuMsg>("/imu/data_raw", 1000, std::bind(&MonoInertialNode::GrabImu, this, _1));
subImage0_ = this->create_subscription<ImageMsg>("/image_raw",100,std::bind(&MonoInertialNode::GrabImage, this, _1)); // d435i topic
syncThread_ = new std::thread(&MonoInertialNode::SyncWithImu, this);
std::cout << "slam changed" << std::endl;
}
MonoInertialNode::~MonoInertialNode()
{
syncThread_->join();
delete syncThread_;
// Stop all threads
m_SLAM->Shutdown();
// Save camera trajectory
m_SLAM->SaveKeyFrameTrajectoryTUM("KeyFrameTrajectory.txt");
}
void MonoInertialNode::GrabImu(const ImuMsg::SharedPtr msg)
{
bufMutex_.lock();
imuBuf_.push(msg);
bufMutex_.unlock();
}
void MonoInertialNode::GrabImage(const ImageMsg::SharedPtr msg0)
{
bufMutex0_.lock();
if(!image0Buf_.empty())
image0Buf_.pop();
image0Buf_.push(msg0);
bufMutex0_.unlock();
}
cv::Mat MonoInertialNode::GetImage(const ImageMsg::SharedPtr msg)
{
cv_bridge::CvImageConstPtr cv_ptr;
try
{
cv_ptr = cv_bridge::toCvShare(msg, sensor_msgs::image_encodings::MONO8);
}
catch (cv_bridge::Exception &e)
{
RCLCPP_ERROR(this->get_logger(), "cv_bridge exception: %s", e.what());
}
if (cv_ptr->image.type() == 0)
{
return cv_ptr->image.clone();
}
else
{
std::cerr << "Error image type" << std::endl;
return cv_ptr->image.clone();
}
}
void MonoInertialNode::SyncWithImu()
{
while(1)
{
cv::Mat im;
double tIm = 0;
if(!image0Buf_.empty() && !imuBuf_.empty())
{
tIm = Utility::StampToSec(image0Buf_.front()->header.stamp);
if(tIm > Utility::StampToSec(imuBuf_.back()->header.stamp))
continue;
bufMutex0_.lock();
im = GetImage(image0Buf_.front());
image0Buf_.pop();
bufMutex0_.unlock();
vector<ORB_SLAM3::IMU::Point> vImuMeas;
bufMutex_.lock();
if(!imuBuf_.empty())
{
vImuMeas.clear();
while(!imuBuf_.empty() && Utility::StampToSec(imuBuf_.front()->header.stamp) <= tIm)
{
double t = Utility::StampToSec(imuBuf_.front()->header.stamp);
cv::Point3f acc(imuBuf_.front()->linear_acceleration.x, imuBuf_.front()->linear_acceleration.y, imuBuf_.front()->linear_acceleration.z);
cv::Point3f gyr(imuBuf_.front()->angular_velocity.x, imuBuf_.front()->angular_velocity.y, imuBuf_.front()->angular_velocity.z);
vImuMeas.push_back(ORB_SLAM3::IMU::Point(acc,gyr,t));
imuBuf_.pop();
}
}
bufMutex_.unlock();
if(bClahe_)
{
clahe_->apply(im,im);
}
m_SLAM->TrackMonocular(im,tIm,vImuMeas);
}
std::chrono::milliseconds tSleep(1);
std::this_thread::sleep_for(tSleep);
}
}
int main(int argc, char **argv)
{
bool bEqual = false;
if(argc < 3 || argc > 4)
{
cerr << endl << "Usage: rosrun ORB_SLAM3 Mono_Inertial path_to_vocabulary path_to_settings [do_equalize]" << endl;
rclcpp::shutdown();
return 1;
}
if(argc==4)
{
std::string sbEqual(argv[3]);
if(sbEqual == "true")
bEqual = true;
}
rclcpp::init(argc, argv);
ORB_SLAM3::System SLAM(argv[1], argv[2], ORB_SLAM3::System::IMU_MONOCULAR, true);
auto node = std::make_shared<MonoInertialNode>(&SLAM, argv[2]);
std::cout << "============================ " << std::endl;
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
3.修改CMakeLists.txt
添加:
add_executable(mono-inertial
src/monocular-inertial/ros2_mono_inertial.cpp
)
ament_target_dependencies(mono-inertial rclcpp sensor_msgs cv_bridge ORB_SLAM3 Pangolin OpenCV)
在install(TARGETS位置添加你创建的运行节点名称这里添加mono-inertial
4.编译运行
1)在ORB_SLAM3/ROS2_ORB_SLAM3中进入终端编译:colcon build
2)因为要开启多个终端,所以直接写了mono_inertial.sh文件一次性执行:

先分别查看查看挂载点
ls -l /dev/ttyUSB*
ls -l /dev/video*
打开串口权限:sudo chmod +777 /dev/ttyUSB0
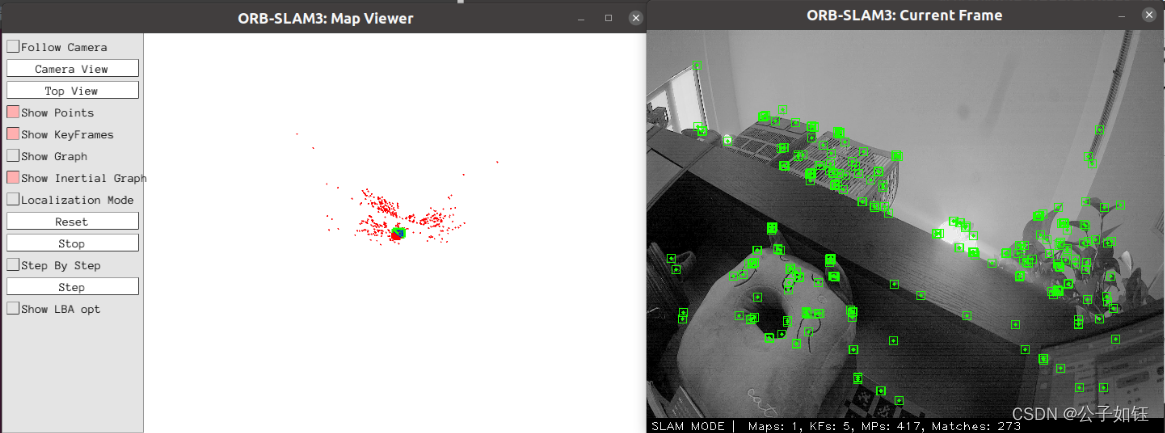
4)运行
在文件mono_inertial.sh所在的文件夹中进入终端:
sudo chmod +x mono_inertial.sh
./mono_inertial.sh