inertial部分的对比
| ORB_SLAM3 | VINS | |
|---|---|---|
| IMU的偏差 | 同时考虑了加速度计和陀螺仪的偏差,并且将其放在目标函数中与重力方向,尺度因子等待优化变量共同优化,在inertialoptimization函数 | 只估计了陀螺仪的偏差,并且是将其考虑成非线性的,将其独立出来单独优化,没有采用g2o求解器,而是直接一次高斯牛顿迭代解决,在initial_aligment.cpp中的solveGyroscopeBias中。 |
| 速度,重力,尺度因子 | 与IMU偏差共同估计,通过最大后验估计并取负对数将其转换成包含IMU先验残差的非线性最小二乘问题,利用g2o去求解inertial-only map下的因子图,速度,尺度与重力方向都是顶点 | initial_alignment.cpp中的linearalignment(),首先根据预积分量的约束,将世界坐标系转换成相机在t0时刻的坐标系,转换成线性最小二乘问题ceres求解 |
| IMU的优化内容 | inertialoptimization中默认各个关键帧对应的IMU的pose是一致的,只优化了IMU的速度,在初始化成功后的5秒和15秒又再次初始化。 | 状态估计器中的Estimator::visualInitialAlign(),计算陀螺仪的偏置校准(加速度偏置没有处理),同时更新了Bgs后,IMU repropagate;得到尺度s和重力g的方向后,转换到第一帧坐标系,然后转换到世界坐标系 |
| 重力g的优化 | 代码中在g与速度等待优化变量的目标函数求解后直接对齐,得出结果,没有看到更多的判断 | 在linearalignment中RefineGravity进一步细化了重力,在其切线空间上用两个变量重新参数化重力,迭代四次,对状态向量重新优化。 |
| 惯性系的对齐 | 在IMU的优化过程中目标函数求解过程同时解算出了优化后的rotation matrix | 计算出重力在第一个关键帧的测量值后对重力进行参数化,限制模长,判断误差是否大于百分之五,然后重力细化,进行坐标系的对齐。 |
| scale的优化 | 在初始化及其之后的100秒之内不断优化尺度和重力方向 | 只在初始化的过程进行优化 |
| 求解形式 | SO(3) | 四元数 |
scale refinement
在localmapping中,如果慢速运动无法提供对IMU参数的充分观测的话,初始化在最初的15秒内并不能收敛到准确解,在这里作者提出了新颖的尺度优化方案,参见作者paper中的tracking and mapping部分,该部分基于改进后的inertial-only optimization,只估计所有关键帧中的尺度以及重力的方向,该部分优化每10秒在localmapping线程中运行一次,对应代码如下
// scale refinement
// Step 9.3 尺度优化
if (((mpAtlas->KeyFramesInMap())<=100) &&
((mTinit>25.0f && mTinit<25.5f)||
(mTinit>35.0f && mTinit<35.5f)||
(mTinit>45.0f && mTinit<45.5f)||
(mTinit>55.0f && mTinit<55.5f)||
(mTinit>65.0f && mTinit<65.5f)||
(mTinit>75.0f && mTinit<75.5f))){
cout << "start scale ref" << endl;
if (mbMonocular)
ScaleRefinement();
cout << "end scale ref" << endl;
}
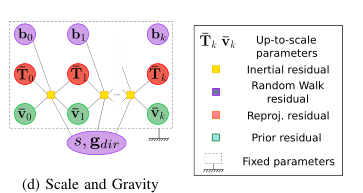
这里对应的inertial-optimization为论文中figure2d对应的因子图,代码为
void Optimizer::InertialOptimization(Map *pMap, Eigen::Matrix3d &Rwg, double &scale)
可以看出该函数的参数为地图点、重力的方向矩阵以及尺度,只对尺度以及重力的方向做了优化,对应的因子图如下:
代码分析如下,对每个地图中的所有关键帧进行遍历:
void Optimizer::InertialOptimization(Map *pMap, Eigen::Matrix3d &Rwg, double &scale)
{
int its = 10;//设置最大迭代次数
long unsigned int maxKFid = pMap->GetMaxKFid();
const vector<KeyFrame*> vpKFs = pMap->GetAllKeyFrames();//从地图中获得所有的关键帧
// Setup optimizer
g2o::SparseOptimizer optimizer;
g2o::BlockSolverX::LinearSolverType * linearSolver;
linearSolver = new g2o::LinearSolverEigen<g2o::BlockSolverX::PoseMatrixType>();
g2o::BlockSolverX * solver_ptr = new g2o::BlockSolverX(linearSolver);
g2o::OptimizationAlgorithmGaussNewton* solver = new g2o::OptimizationAlgorithmGaussNewton(solver_ptr);
optimizer.setAlgorithm(solver);
// Set KeyFrame vertices (all variables are fixed)设置关键帧的节点,所有的变量保持固定
for(size_t i=0; i<vpKFs.size(); i++)
{
KeyFrame* pKFi = vpKFs[i];
if(pKFi->mnId>maxKFid)//如果当前关键帧的ID大于所允许的最大ID,跳过这个关键帧
continue;
VertexPose * VP = new VertexPose(pKFi);//关键帧的位姿设置为节点
VP->setId(pKFi->mnId);
VP->setFixed(true);
optimizer.addVertex(VP);
VertexVelocity* VV = new VertexVelocity(pKFi);//关键帧的速度设置为节点
VV->setId(maxKFid+1+(pKFi->mnId));
VV->setFixed(true);//设置速度节点固定
optimizer.addVertex(VV);
// Vertex of fixed biases 将陀螺仪以及加速度的偏差设置为固定的,并添加到因子图当中
VertexGyroBias* VG = new VertexGyroBias(vpKFs.front());
VG->setId(2*(maxKFid+1)+(pKFi->mnId));
VG->setFixed(true);
optimizer.addVertex(VG);
VertexAccBias* VA = new VertexAccBias(vpKFs.front());
VA->setId(3*(maxKFid+1)+(pKFi->mnId));
VA->setFixed(true);
optimizer.addVertex(VA);
}
// Gravity and scale 因为重力方向矩阵以及尺度因子是待优化的变量,所以不固定
VertexGDir* VGDir = new VertexGDir(Rwg);
VGDir->setId(4*(maxKFid+1));
VGDir->setFixed(false);
optimizer.addVertex(VGDir);
VertexScale* VS = new VertexScale(scale);
VS->setId(4*(maxKFid+1)+1);
VS->setFixed(false);
optimizer.addVertex(VS);
// Graph edges
for(size_t i=0;i<vpKFs.size();i++)
{
KeyFrame* pKFi = vpKFs[i];
//对每个关键帧,判断其是否有前一关键帧数据,是否超出检索范围
if(pKFi->mPrevKF && pKFi->mnId<=maxKFid)
{
if(pKFi->isBad() || pKFi->mPrevKF->mnId>maxKFid)
continue;
//将优化器中之前加入的节点作为hypergraph中的顶点,根据ID进行选择添加
g2o::HyperGraph::Vertex* VP1 = optimizer.vertex(pKFi->mPrevKF->mnId);
g2o::HyperGraph::Vertex* VV1 = optimizer.vertex((maxKFid+1)+pKFi->mPrevKF->mnId);
g2o::HyperGraph::Vertex* VP2 = optimizer.vertex(pKFi->mnId);
g2o::HyperGraph::Vertex* VV2 = optimizer.vertex((maxKFid+1)+pKFi->mnId);
g2o::HyperGraph::Vertex* VG = optimizer.vertex(2*(maxKFid+1)+pKFi->mPrevKF->mnId);
g2o::HyperGraph::Vertex* VA = optimizer.vertex(3*(maxKFid+1)+pKFi->mPrevKF->mnId);
g2o::HyperGraph::Vertex* VGDir = optimizer.vertex(4*(maxKFid+1));
g2o::HyperGraph::Vertex* VS = optimizer.vertex(4*(maxKFid+1)+1);
if(!VP1 || !VV1 || !VG || !VA || !VP2 || !VV2 || !VGDir || !VS)
{
Verbose::PrintMess("Error" + to_string(VP1->id()) + ", " + to_string(VV1->id()) + ", " + to_string(VG->id()) + ", " + to_string(VA->id()) + ", " + to_string(VP2->id()) + ", " + to_string(VV2->id()) + ", " + to_string(VGDir->id()) + ", " + to_string(VS->id()), Verbose::VERBOSITY_NORMAL);
continue;
}
EdgeInertialGS* ei = new EdgeInertialGS(pKFi->mpImuPreintegrated);//预积分结果作为多向边将各个顶点连接起来
ei->setVertex(0,dynamic_cast<g2o::OptimizableGraph::Vertex*>(VP1));
ei->setVertex(1,dynamic_cast<g2o::OptimizableGraph::Vertex*>(VV1));
ei->setVertex(2,dynamic_cast<g2o::OptimizableGraph::Vertex*>(VG));
ei->setVertex(3,dynamic_cast<g2o::OptimizableGraph::Vertex*>(VA));
ei->setVertex(4,dynamic_cast<g2o::OptimizableGraph::Vertex*>(VP2));
ei->setVertex(5,dynamic_cast<g2o::OptimizableGraph::Vertex*>(VV2));
ei->setVertex(6,dynamic_cast<g2o::OptimizableGraph::Vertex*>(VGDir));
ei->setVertex(7,dynamic_cast<g2o::OptimizableGraph::Vertex*>(VS));
optimizer.addEdge(ei);//将预积分连接起来的边加入优化器
}
}
// Compute error for different scales
optimizer.setVerbose(false);
optimizer.initializeOptimization();
optimizer.optimize(its);
// Recover optimized data 更新待估计的尺度因子以及重力方向
scale = VS->estimate();
Rwg = VGDir->estimate().Rwg;
}