RANSAC算法
RANSAC(Random Sample Consensus)是一种用于估计数据中包含异常值时的模型参数的迭代算法,特别适用于数据包含噪声或离群点的情况。
核心思想
RANSAC通过随机采样和一致性验证来找到能够最大化拟合数据模型的参数,重点在于对离群点的鲁棒性。
-
随机采样:
从数据集中随机选择一小部分点,假设这些点不包含离群点。 -
模型拟合:
用选定的样本点拟合模型。 -
一致性验证:
验证剩余点是否符合该模型(即它们是否在模型定义的误差范围内)。 -
评估模型:
计算当前模型的一致性点数,并记录符合度最高的模型。 -
重复迭代:
重复上述过程一定次数,直到找到最佳模型。
优缺点
优点:
- 对数据中的离群点具有很强的鲁棒性。
- 适用于各种模型(如直线、平面或更复杂的非线性模型)的拟合。
缺点:
- 算法结果可能受随机性影响(需要足够多的迭代次数)。
- 当数据中的离群点比例过高时,可能难以找到正确的模型。
RANSAC算法的伪代码
输入:数据集、模型类型、最大迭代次数、误差阈值
输出:最佳模型参数
1. 初始化:
- best_model ← None
- max_inliers ← 0
2. 循环 max_iterations 次:
a. 从数据集中随机选择子集 sample_points
b. 使用 sample_points 拟合模型 model
c. 计算所有点到 model 的误差
d. 识别误差小于 threshold 的内点集合 inliers
e. 如果 inliers 的数量大于 max_inliers:
- 更新 max_inliers ← inliers 的数量
- 更新 best_model ← 当前 model
3. 返回 best_model
Python实现:RANSAC用于直线拟合
以下是一个简单的代码示例,演示如何用 RANSAC 进行直线拟合:
import numpy as np
import matplotlib.pyplot as plt
from sklearn.linear_model import RANSACRegressor
from sklearn.datasets import make_regression
plt.rcParams['font.sans-serif'] = ['SimHei']
# 解决负号'-'显示为方块的问题
plt.rcParams['axes.unicode_minus'] = False
# 生成数据(包含离群点)
np.random.seed(42)
X = np.linspace(-5, 5, 100).reshape(-1, 1)
y = 2 * X.squeeze() + np.random.normal(0, 0.5, X.shape[0])
# 添加离群点
outliers = np.random.choice(X.shape[0], size=20, replace=False)
y[outliers] += np.random.normal(10, 5, size=len(outliers))
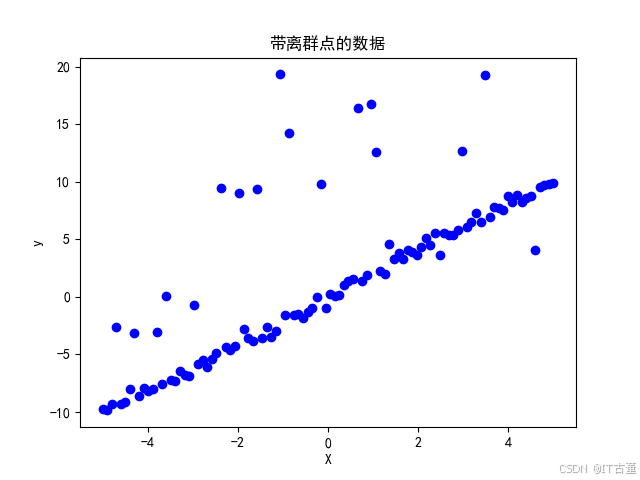
# 可视化数据
plt.scatter(X, y, color="blue", label="数据点")
plt.xlabel("X")
plt.ylabel("y")
plt.title("带离群点的数据")
plt.show()
# 使用 RANSAC 拟合
ransac = RANSACRegressor()
ransac.fit(X, y)
y_ransac = ransac.predict(X)
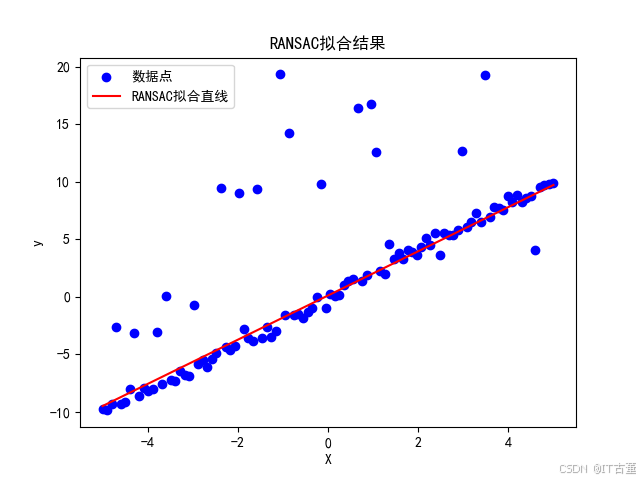
# 绘制结果
plt.scatter(X, y, color="blue", label="数据点")
plt.plot(X, y_ransac, color="red", label="RANSAC拟合直线")
plt.xlabel("X")
plt.ylabel("y")
plt.legend()
plt.title("RANSAC拟合结果")
plt.show()
# 输出拟合结果
inlier_mask = ransac.inlier_mask_
outlier_mask = ~inlier_mask
print(f"内点数:{np.sum(inlier_mask)}, 外点数:{np.sum(outlier_mask)}")
运行结果
-
RANSAC拟合结果:
- 红色直线表示 RANSAC 模型的拟合结果。
- 蓝色散点包括原始数据点和离群点。
-
内点与外点统计:
内点数:87, 外点数:13- RANSAC 能够有效区分内点和外点,拟合结果不受离群点影响。
RANSAC的应用领域
- 计算机视觉:
- 估计图像特征之间的变换(如单应性矩阵、基本矩阵)。
- 机器人导航:
- 激光雷达点云拟合平面或直线。
- 信号处理与工程:
- 对噪声信号中的模型参数估计。
- 统计学与机器学习:
- 构建鲁棒模型,减少异常数据对结果的影响。