3.2
- 轨迹不同于路径,需要是光滑的,考虑无人机动力学约束
- 三阶导控制jerk,四阶导控制snap
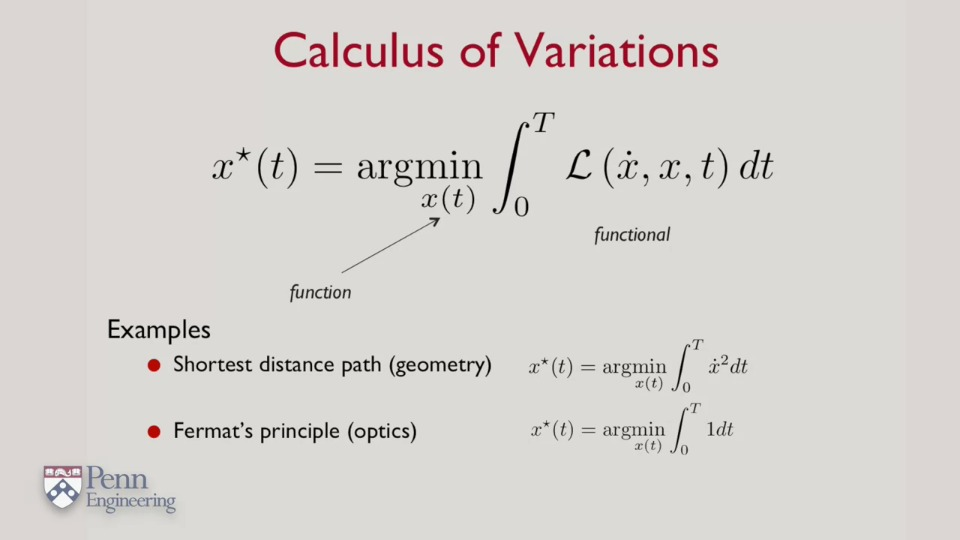
- 如果轨迹要满足某个特点,如:最短时间、最短路径,此时最优控制思路会被引入,变分法等算法可用以求解,选择
x
∗
x*
x∗使得泛函(functional)
L
\mathcal{L}
L取得最优。
- 欧拉-拉格朗日方程:最优值的必要条件
d d t ( ∂ L ∂ x ˙ ) − ∂ L ∂ x = 0 ∂ L ∂ x − d d t ( ∂ L ∂ x ˙ ) + d 2 d t 2 ( ∂ L ∂ x ¨ ) + … + ( − 1 ) n d n d t n ( ∂ L ∂ x ( n ) ) = 0 \frac{d}{d t}\left(\frac{\partial \mathcal{L}}{\partial \dot{x}}\right)-\frac{\partial \mathcal{L}}{\partial x}=0\\ \frac{\partial \mathcal{L}}{\partial x}-\frac{d}{d t}\left(\frac{\partial \mathcal{L}}{\partial \dot{x}}\right)+\frac{d^{2}}{d t^{2}}\left(\frac{\partial \mathcal{L}}{\partial \ddot{x}}\right)+\ldots+(-1)^{n} \frac{d^{n}}{d t^{n}}\left(\frac{\partial \mathcal{L}}{\partial x^{(n)}}\right)=0 dtd(∂x˙∂L)−∂x∂L=0∂x∂L−dtd(∂x˙∂L)+dt2d2(∂x¨∂L)+…+(−1)ndtndn(∂x(n)∂L)=0 - 最短距离轨迹也是最小速度轨迹
证明:最小速度轨迹满足
x ⋆ ( t ) = argmin x ( t ) ∫ 0 T x ˙ 2 d t x^{\star}(t)=\underset{x(t)}{\operatorname{argmin}} \int_{0}^{T} \dot{x}^{2} d t x⋆(t)=x(t)argmin∫0Tx˙2dt
通过欧拉-拉格朗日方程,解得该 x ⋆ ( t ) x^{\star}(t) x⋆(t)为一条直线。
而采用分段微分再积分的方法,最短距离轨迹满足
x ⋆ ( t ) = argmin x ( t ) ∫ 0 T 1 + x ˙ 2 d t x^{\star}(t)=\underset{x(t)}{\operatorname{argmin}} \int_{0}^{T} \sqrt{1+\dot{x}^{2}} d t x⋆(t)=x(t)argmin∫0T1+x˙2dt
解出来仍是一条直线,起点终点相同,只有一条直线。
Quiz 3
- 优化k阶导数,会得到(2k-1)阶的轨迹曲线
- 我们在设计控制模块中的控制器时所做的简化假设有:无人机位于平衡(悬停)点附近,角速度、俯仰角、滚转角接近于0(交叉相乘项直接忽略)