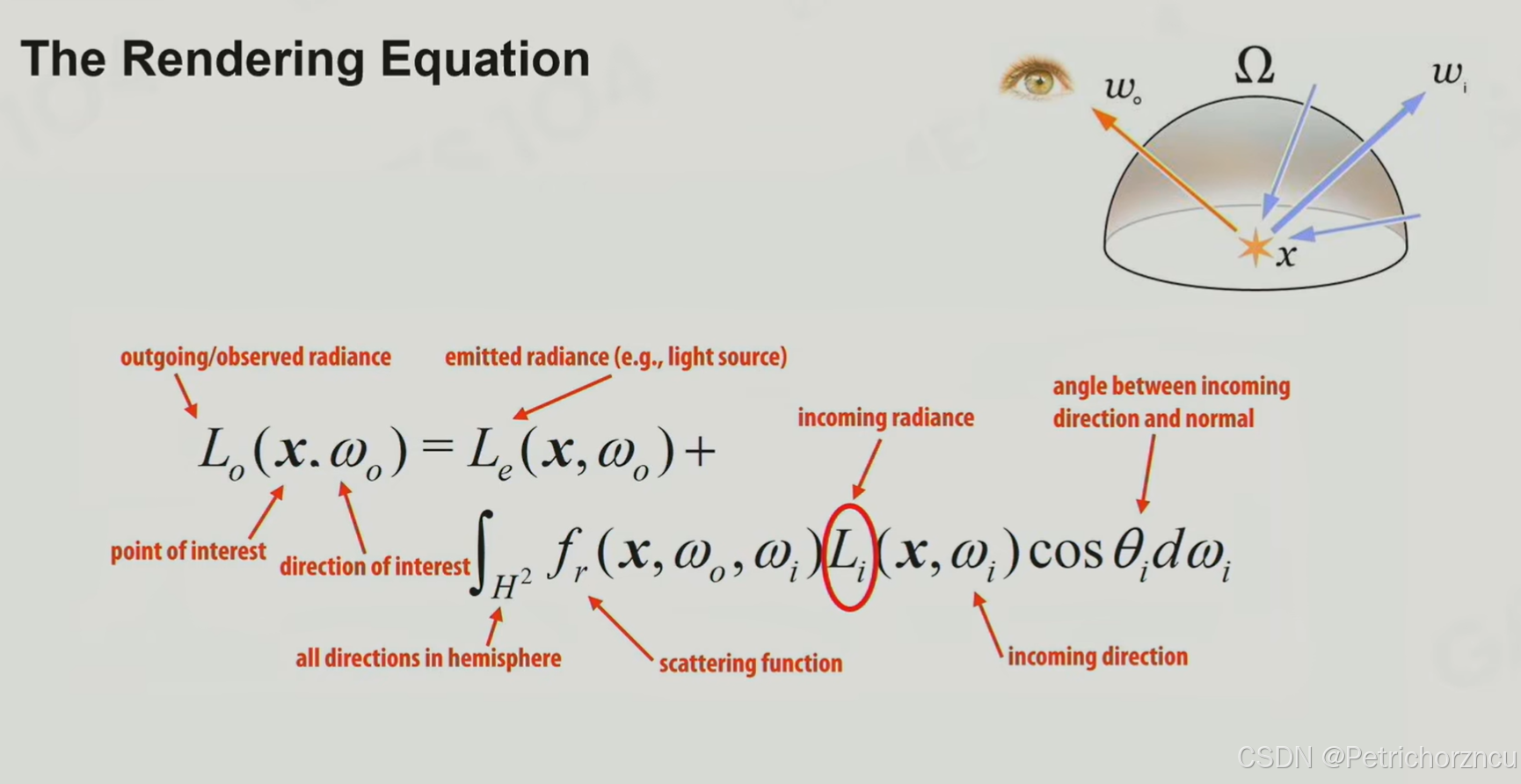
渲染方程及挑战
挑战
对于任一给定方向如何获得radiance–阴影
对于光源和表面shading的积分运算(蒙特卡洛积分)
对于反射光多Bounce的无限递归计算
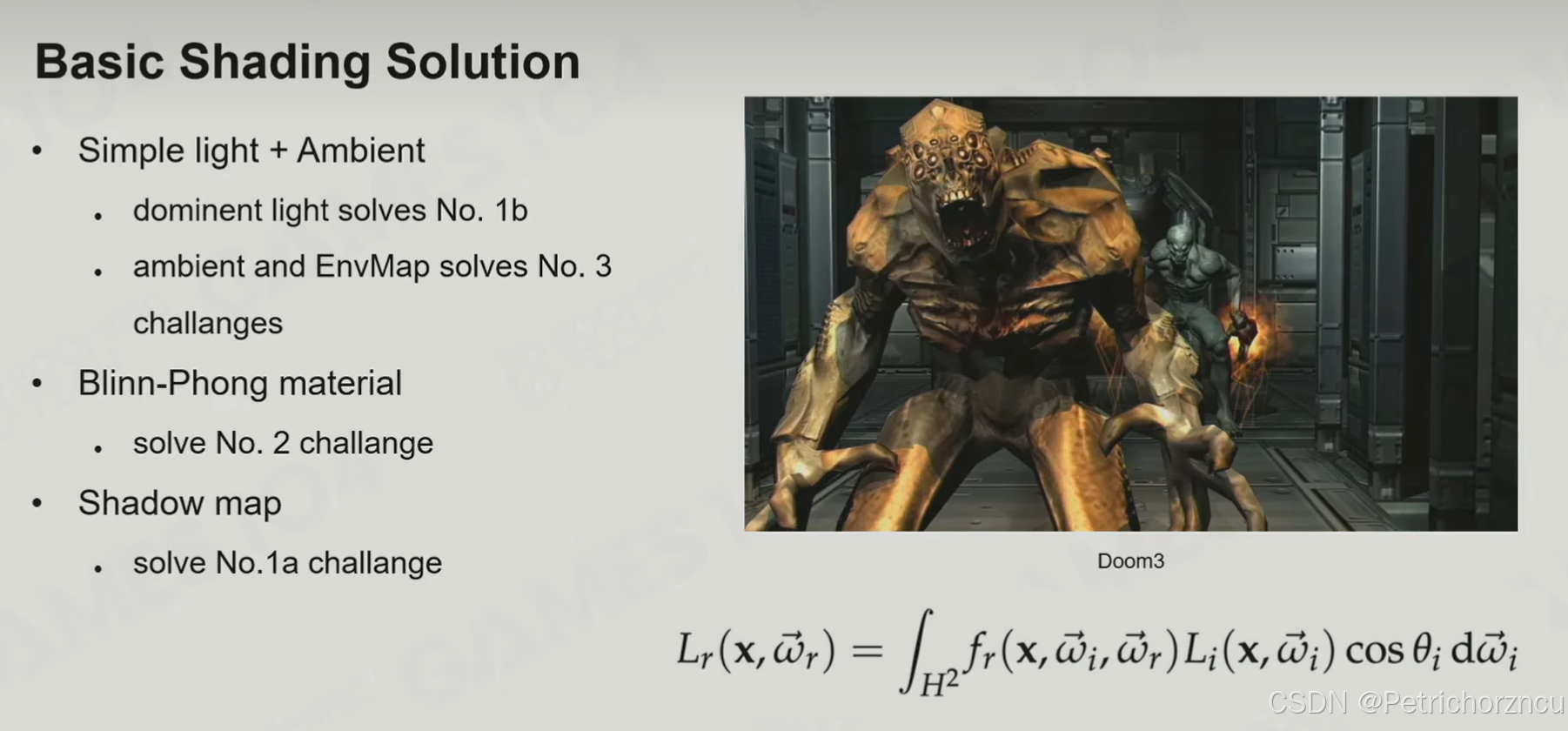
基础光照解决方案
Blinn-Phong模型:
简化阴影
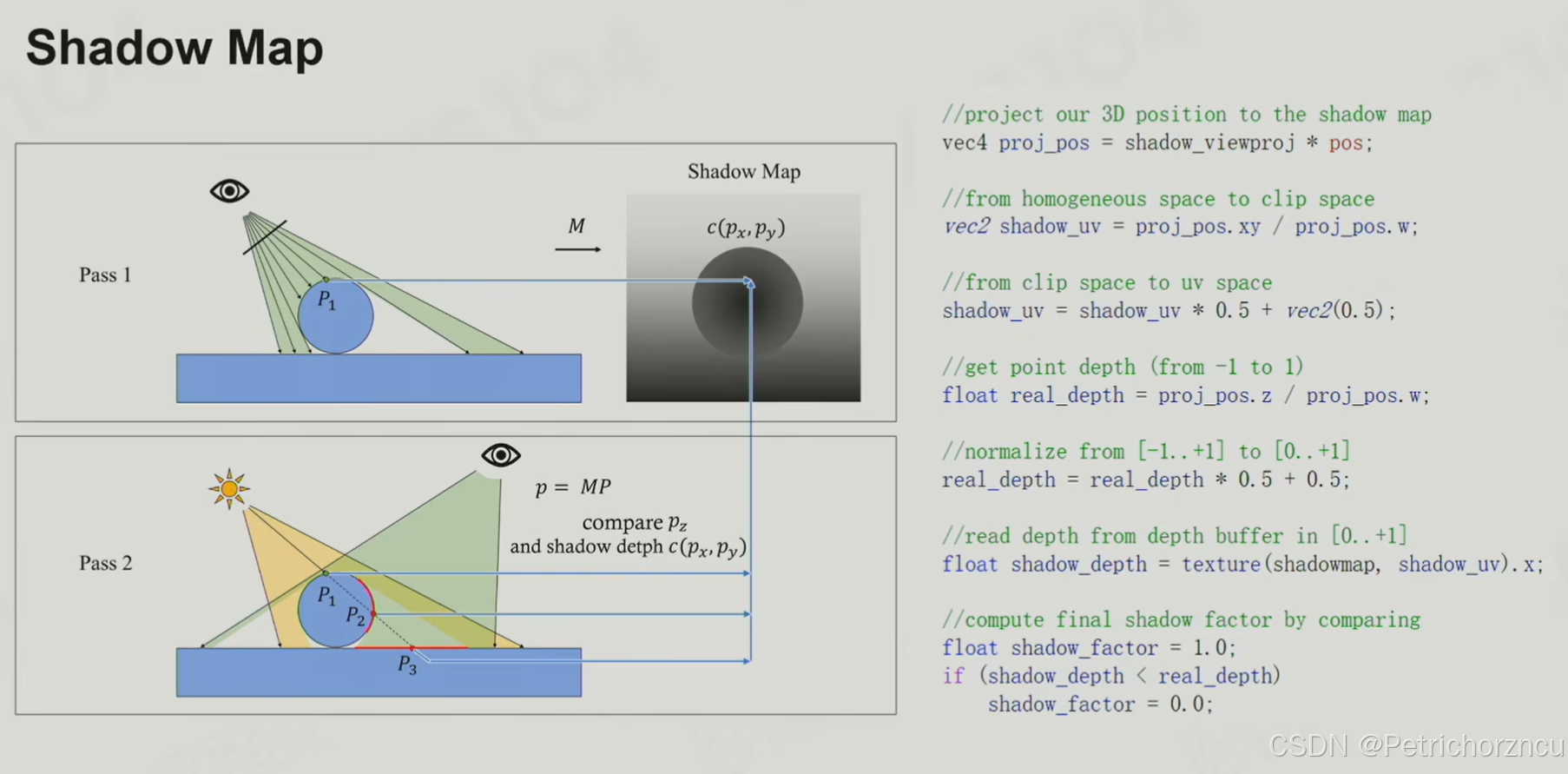
最常见的处理方式就是Shadow Map:先在光源处放置相机,以z-buffer的方式储存一张深度缓冲,第二次将相机放置在view位置,并将视锥内的点的深度和深度缓冲中的对应点(矩阵变换)的深度进行对比,若前者大于后者,则认为视锥中的点处于阴影中
缺点:
光源处的采样率和观察处的采样率不一样,有分辨率限制,同时光源角度大时会出现自阴影锯齿的问题
简化光源
用平行光、聚光灯、点光源作为MainLight 来简化各种光源,用Ambient Light替代光源外的环境光
用可采样的环境贴图代替反射光线,环境贴图的mipmap代替粗糙度表现
最终结果 = MainLight + Ambient Light+Environment Map
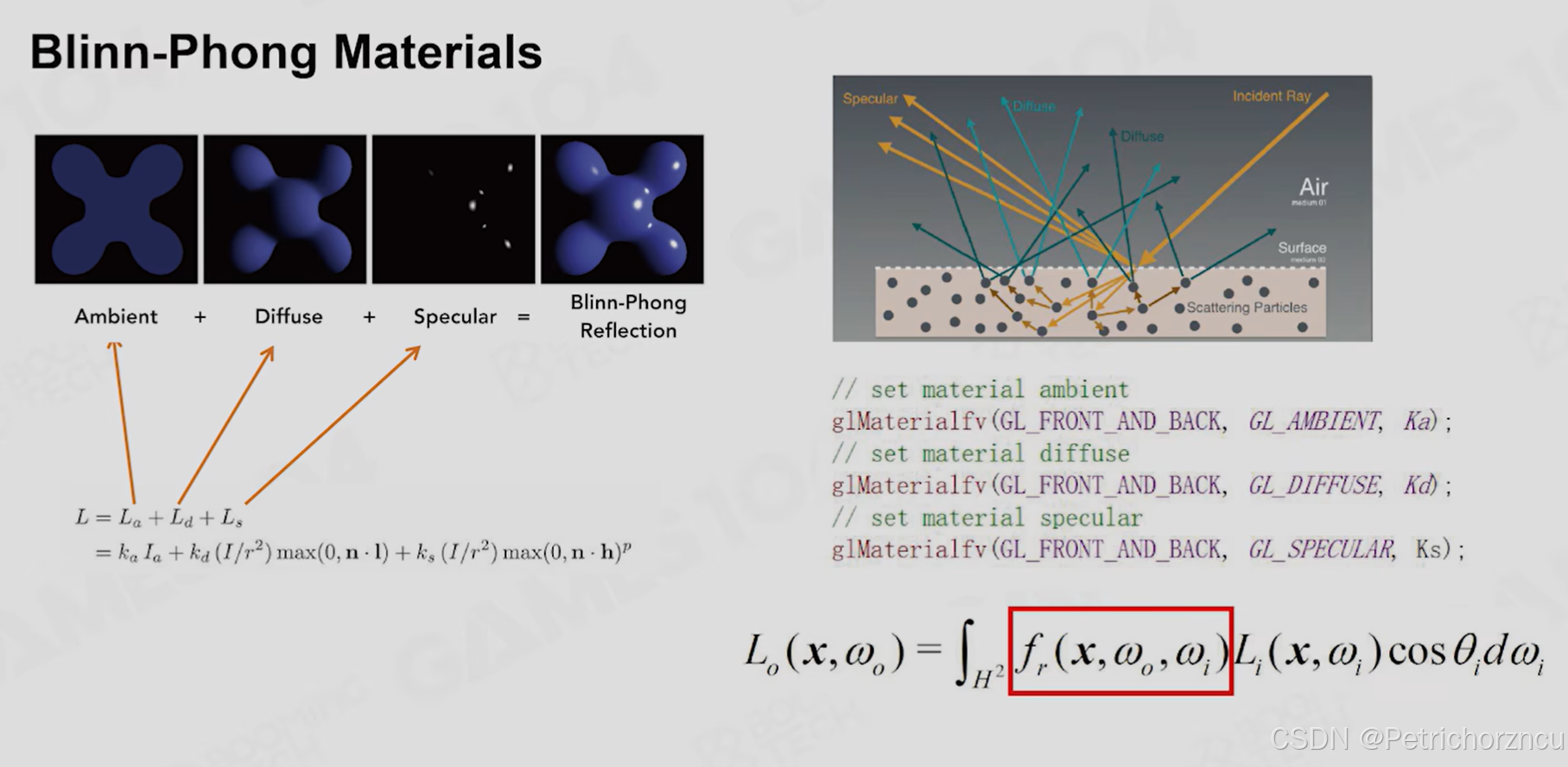
简化材质(Blinn-Phong模型)
基于光可叠加原理(渲染方程中用体现),Blinn-Phong模型通过Ambient + Diffuse + Specular来简单粗暴的着色。
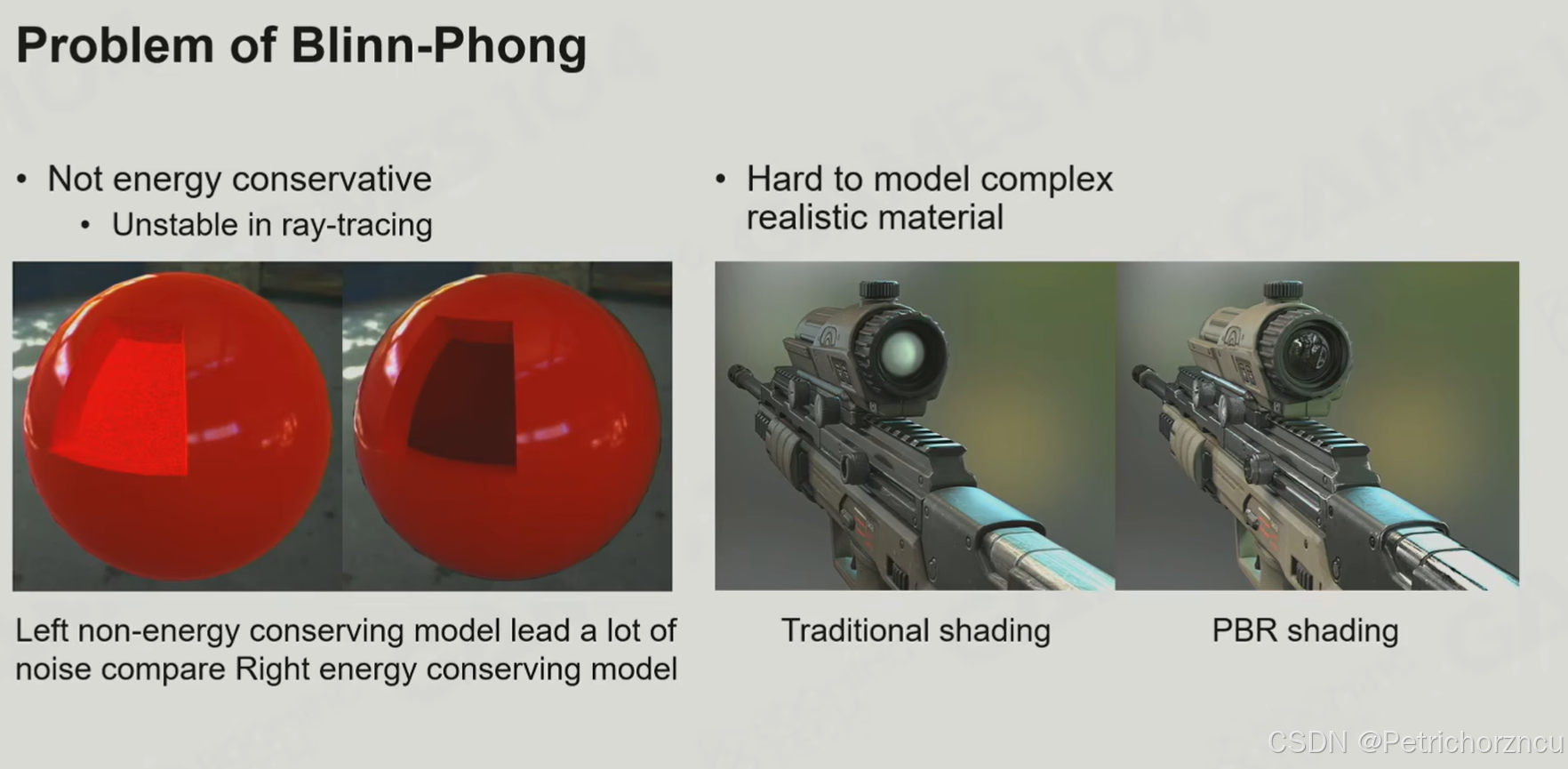
布林冯模型存在的问题
能量不保守,使用Blinn-Phong模型的出射光照能量可能大于入射光照的能量,这在计算光线追踪时会带来很大的问题:这一过程在光线追踪中经过无限次反弹后,会使得本该暗的地方变得过于明亮。
难以表现真实的质感,Blinn-Phong模型虽然比较经典,但它却很难表现出物体在真实世界中的模样,总是有一种”塑料“感。
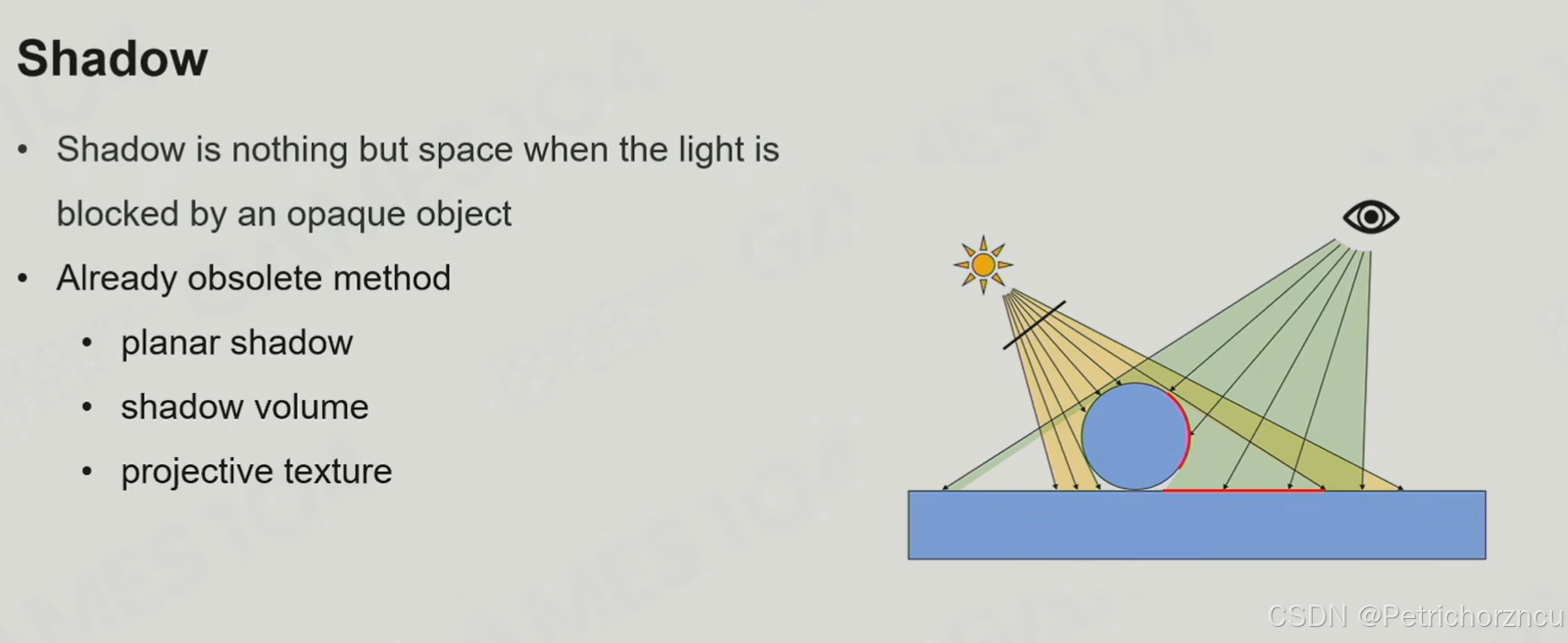
简化阴影
阴影:当光线被不透明物体阻挡时形成的空间
最常见的处理方式就是Shadow Map:先在光源处放置相机,以z-buffer的方式储存一张深度缓冲,第二次将相机放置在view位置,并将视锥内的点的深度和深度缓冲中的对应点(矩阵变换)的深度进行对比,若前者大于后者,则认为视锥中的点处于阴影中
缺点:
光源处的采样率和观察处的采样率不一样,有分辨率限制,同时光源角度大时会出现自阴影锯齿的问题
基于预计算的全局光照
挑战和计算思路
空间换时间
挑战
indirect Light 要想去采样(整个球面)数据量非常大,需要有合适的方式压缩
并且还得便于在渲染方程中进行积分
傅里叶变换
可以把空间域信号转变为频域信号,截取频域的一小段就可以实现对频率整体的一个粗糙的表达,还可以反傅里叶计算还原会空间域。(高效压缩)
卷积定理是傅立叶变换满足的一个重要性质。卷积定理指出,函数 卷积的 傅立叶变换是函数傅立叶变换的乘积。具体分为时域卷积定理和频域卷积定理,时域卷积定理即时域内的卷积对应频域内的乘积;频域卷积定理即频域内的卷积对应时域内的乘积,两者具有对偶关系。
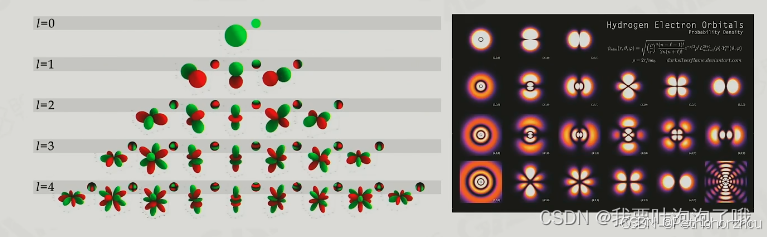
球谐函数(Spherical Harmonics)
SH是拉普拉斯方程的一组限制在球上的解,可以理解为一组sin\cos组成的正交基,数量越多,可以表达的精度越高;并且相互之间正交(卷积为0–简化计算的核心)且二阶导数为0(拟合表面光滑)
一般实时渲染只取前3阶就够了(9个),因为一般只需要低频信息(因此也无法表达更高频);有时只需要知道光从哪里来,就只需0和1阶就够了(4个),如下图。「在这种情况下,压缩后只用32bits(4Bytes)就可以存储一个像素的颜色。卷积时先投影到SH正交基上再系数相乘即可」
SH Lightmap:预计算 GI
有了SH,我们就可以将场景参数化到一张巨大的lightmap贴图上(通常被称为地图集atlas):对所有表面点的irradiance进行离线计算并压缩为SH系数、保存进atlas
计算过程:
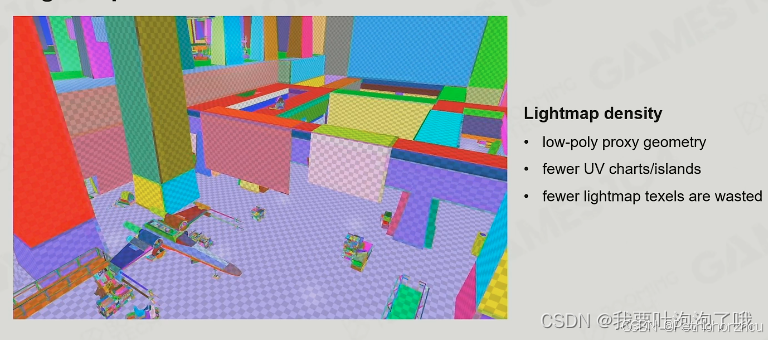
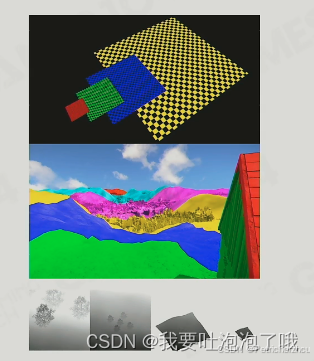
对世界物体进行几何简化(因为要把三维空间复杂集合投影到二维空间),如下图,并且参数分配时需要尽可能在同样的面积或体积内分配的texel精度近似
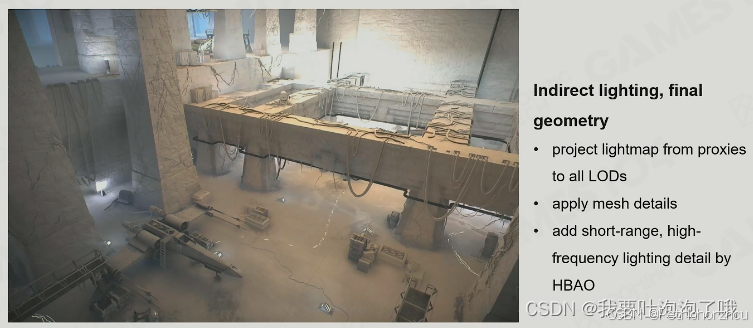
lighting:将lightmap映射到各级LOD上,应用模型细节,用HBAO(水平基准环境光遮蔽Horizon based ambient occlusion,升级版SSAO)加上短程(short-range)增加高频的灯光细节,再加上直接光照和材质的效果
lightmap的光照效果,可以看到已经有很多细节和软阴影效果了,下图是最终应用效果
Lightmap优缺点和可借鉴思想:
优点:
1.实时运行效率很高;
2.可以表现出环境中全局光照的许多细节
缺点:
1.预计算时间非常长(因此老师自己的引擎宁死不用);
2.只能处理静态场景物体和静态光照(动态物体会有类似人物走到一小块阴影里整个人变黑的bug);
3.空间换时间,占用内存较大(几十到几百MB)
可借鉴优秀思想:
空间换时间
把整个场景参数化到二维的tex上(或三维vol上也一样),方便计算
探针 Probe:Light Probe + Refection Probe
优点:运行效率高,静动态物体都可用,可以处理漫反射和镜面反射
缺点:大量的光探测SH需要预计算,没办法做到像lightmap那样那么好的细节(采样太稀疏)
Light Probe
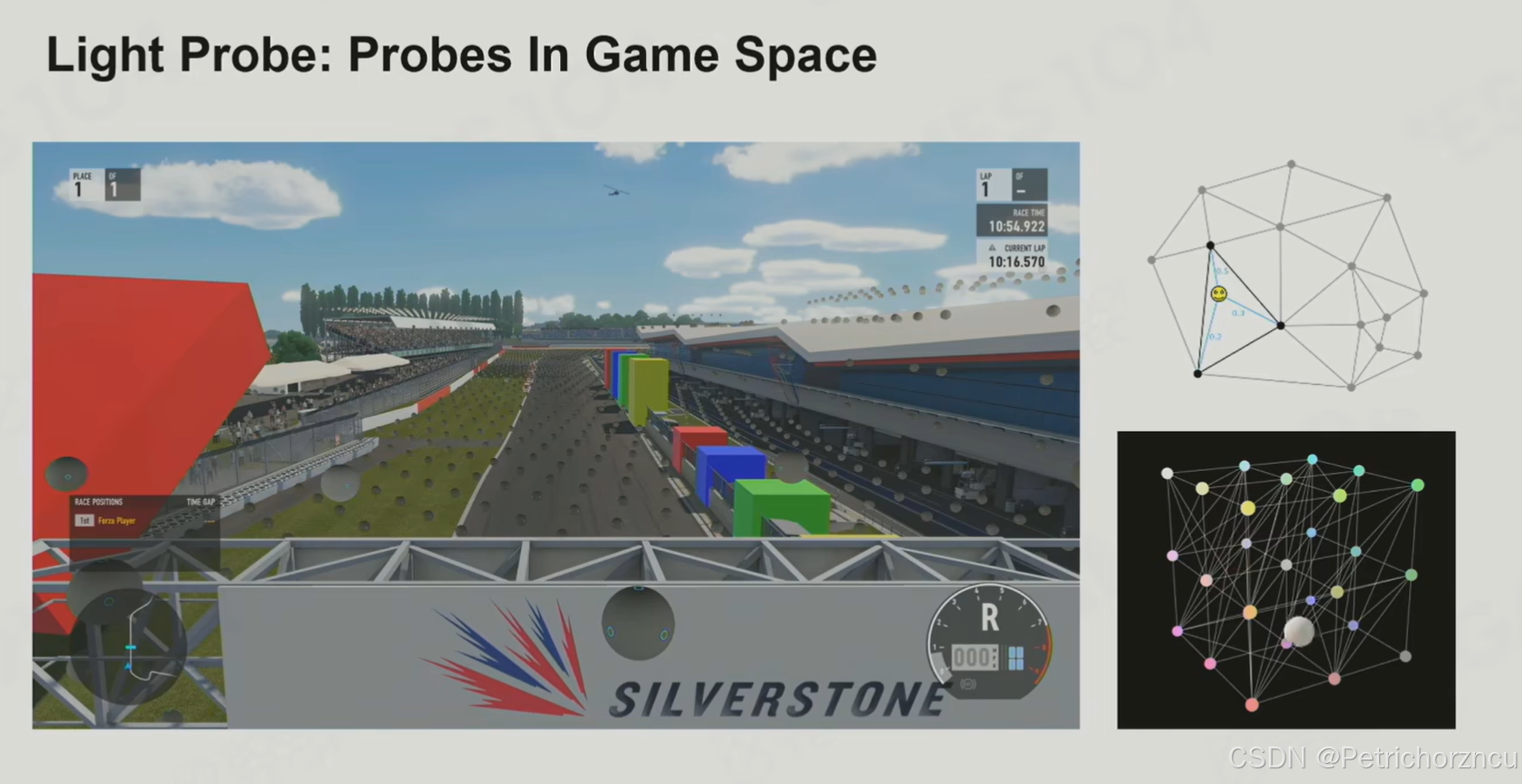
在空间中放置很多采样点,每个采样点采集对应光场信息,物体经过时寻找附近的采样点并插值计算
自动探测点生成:空间内均匀的产生采样点,再根据玩家的可到达区域和建筑物的几何结构进行延拓,相对均匀的分布采样点
Refection Probe
类似的反射probe,数量少,但采样精度很高,应用在镜面等场景
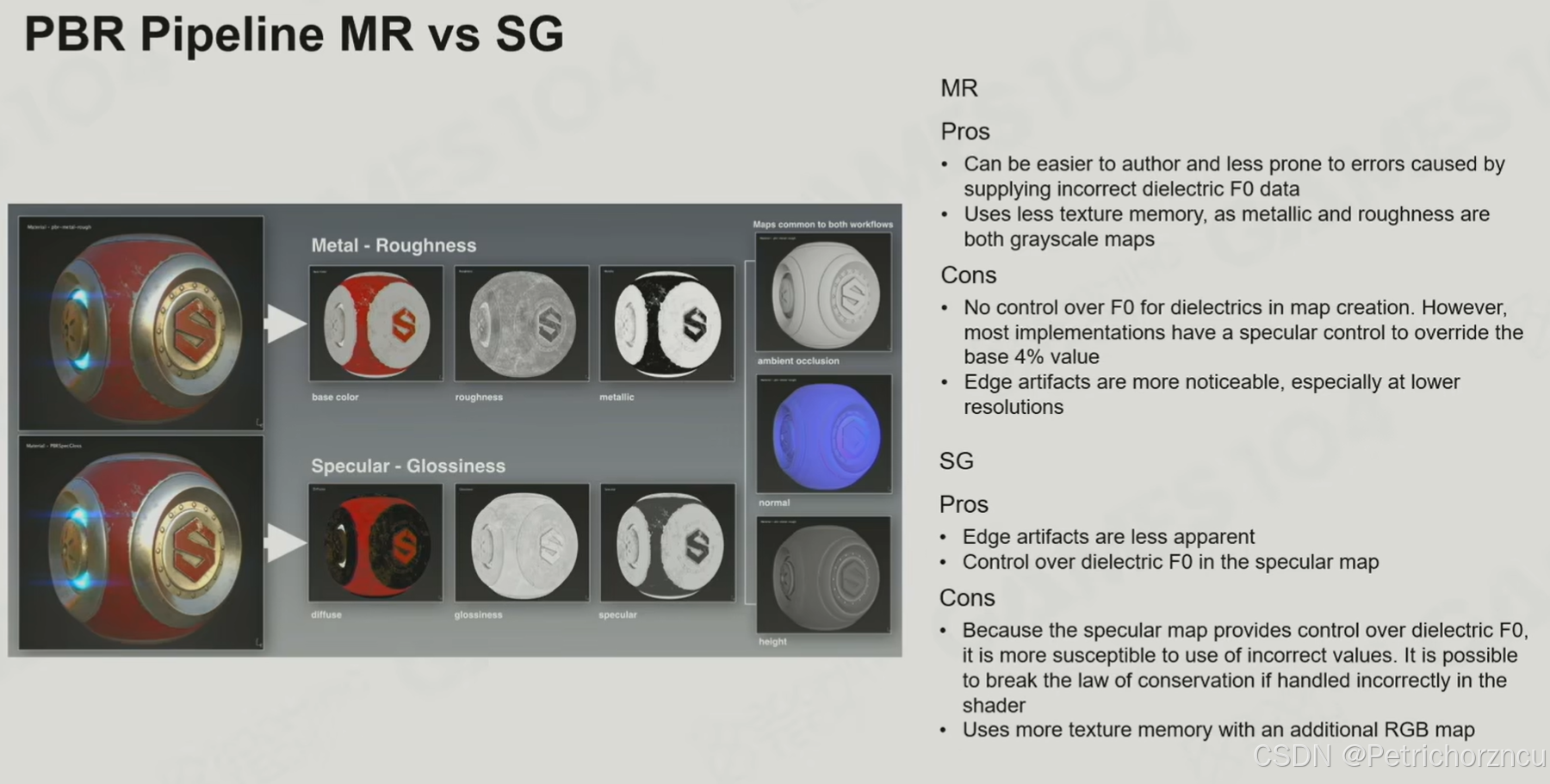
基于物理的材质
微平面理论
BRDF==Material
BRDF(广义)最常用在实时渲染管线中的是Cook-Torrance 模型,其中兼顾了漫反射和镜面反射2个部分
Lambertian漫反射部分
我们知道理想漫反射的反射光线是均匀散布在各个方向的(半球),因此漫反射的BRDF值一定是个常数。假设入射光均匀且布满整个半球,可以得到如下推导:「半球对cos积分结果为π」
cook-torrance镜面反射部分
微表面模型细看有很多凹凸细节,这些细节可看作微小的镜面,远看就像是完全的平面,只能感受到微小平面对整体的作用。现实生活中就算是纯金属表面也有划痕、磨砂等,因此微表面模型能表示非常多实际物体。
菲涅尔方程(Fresnel Rquation)
现实中在不同的角度看物体,明显看到反射率不同(看玻璃也是)
基于图像的光照(Image-Based Lighting,IBL)
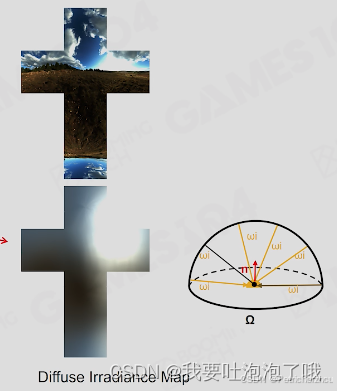
主要思路还是预计算,把复杂的积分都先预计算过,以减少光照中的计算时间。我们会分别预计算漫反射项和镜面项,最终在实时渲染中只需通过简单的纹理采样即可得到结果
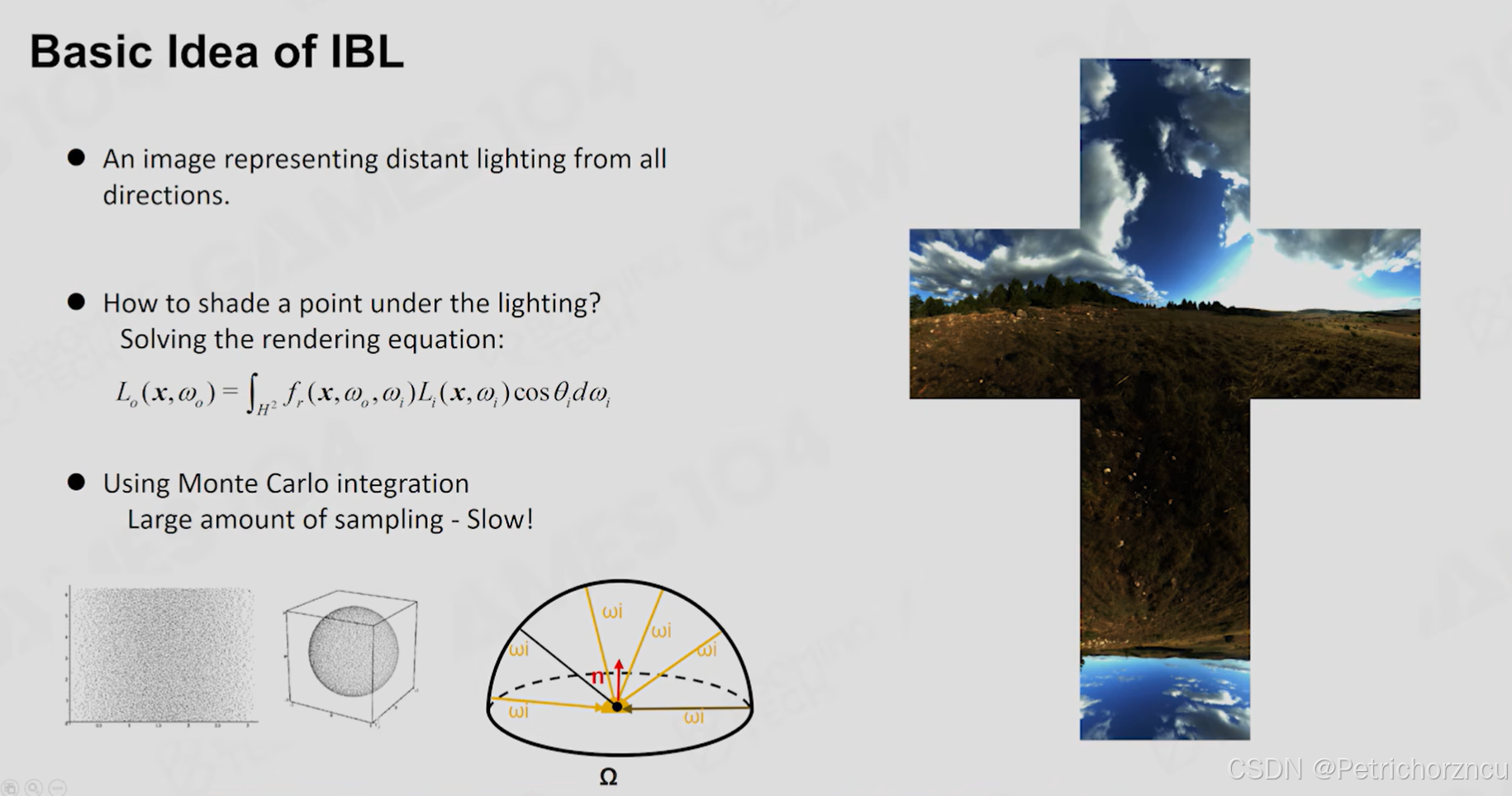
- diffuse:提前将cubemap与反射光卷积的结果计算并储存在Irradiance Map中,使用时只需要取位置上的结果就可以了,见下图左
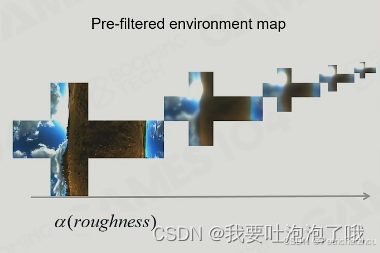
- specular:近似为Lighting Term和BRDF Term的乘积
- Lighting Term:由于不同粗糙度造成的高光结果不一样,用cubemap的minmap存储多个粗糙度的结果,用minmap的精度刚好对应不同粗糙度下的不同精度,图右
- BRDF Term:直接预计算保存到了一张LUT图里,使用F和粗糙度加载即可
阴影(Shadow)
Cascade Shadow级联阴影
对视锥体进行分层,远处的精度降低,近处提高。
需要优化点:blend between Cascade Laters:在层级之间边界的地方做插值以避免出现视觉断层。
优点:解决透视混叠(perspective aliasing)问题;快速生成深度图,深度写入时可提升3倍;效果不错
缺点:存储空间大(空间换时间);绘制时成本昂贵;几乎不可能生成高质量的区域阴影;没有彩色阴影,半透明投射出不透明阴影
软阴影
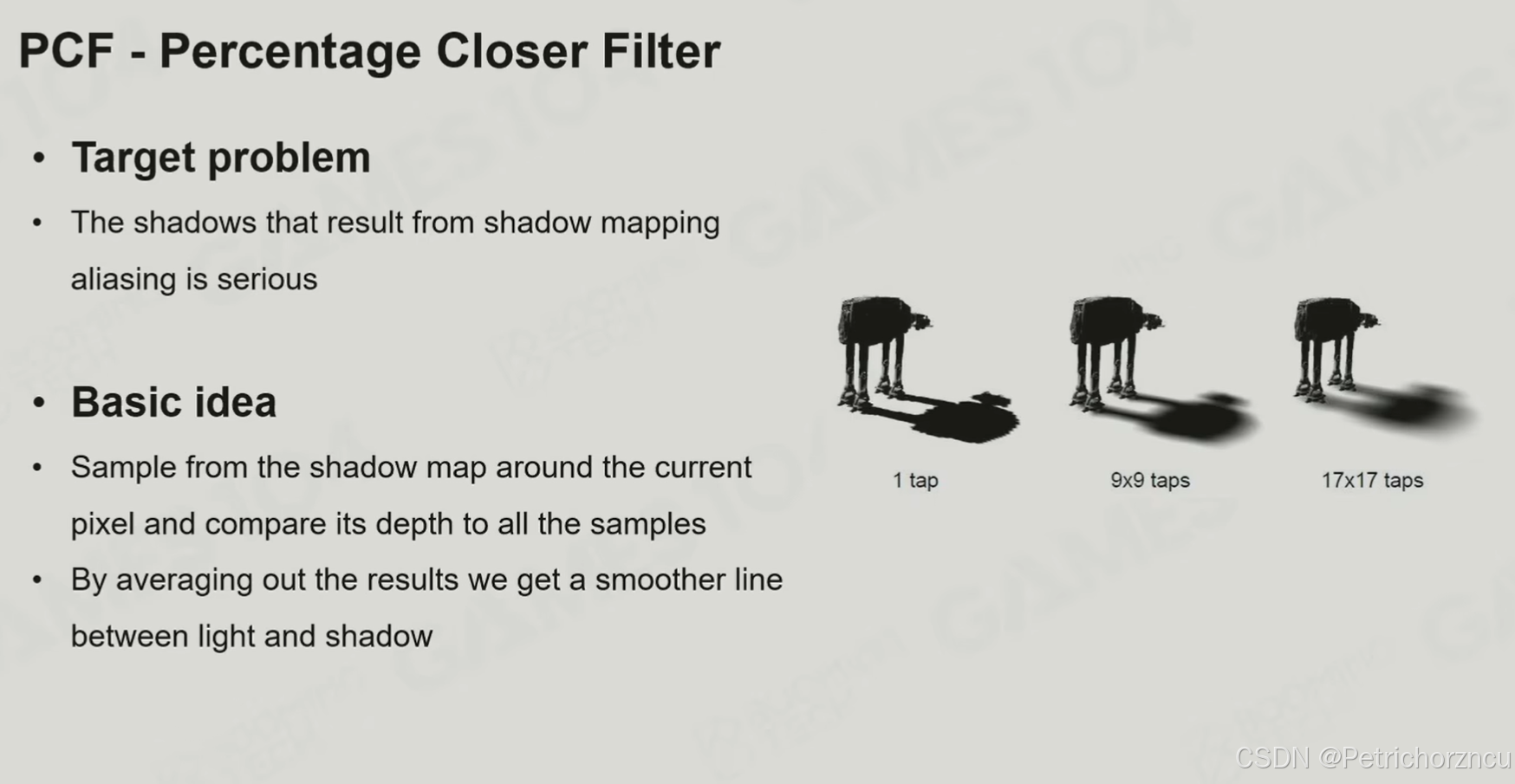
PCF
「该技术起初是用于抗锯齿\反走样,后来发现软阴影也可以用。」
「为什么不对shadow map做滤波?因为把shadow map模糊后,在深度判定完还是硬阴影(相当于二值化)。」
原理是在阴影判定时做一个filtering----不仅计算当前着色点对应shadow map上的深度,还计算该点在shadow map上周围一圈(比如7x7)的深度判定结果(非0即1)并取平均,将平均值作为Visibility项。「如果滤波核比较大,可以在范围内随机采样固定个数」
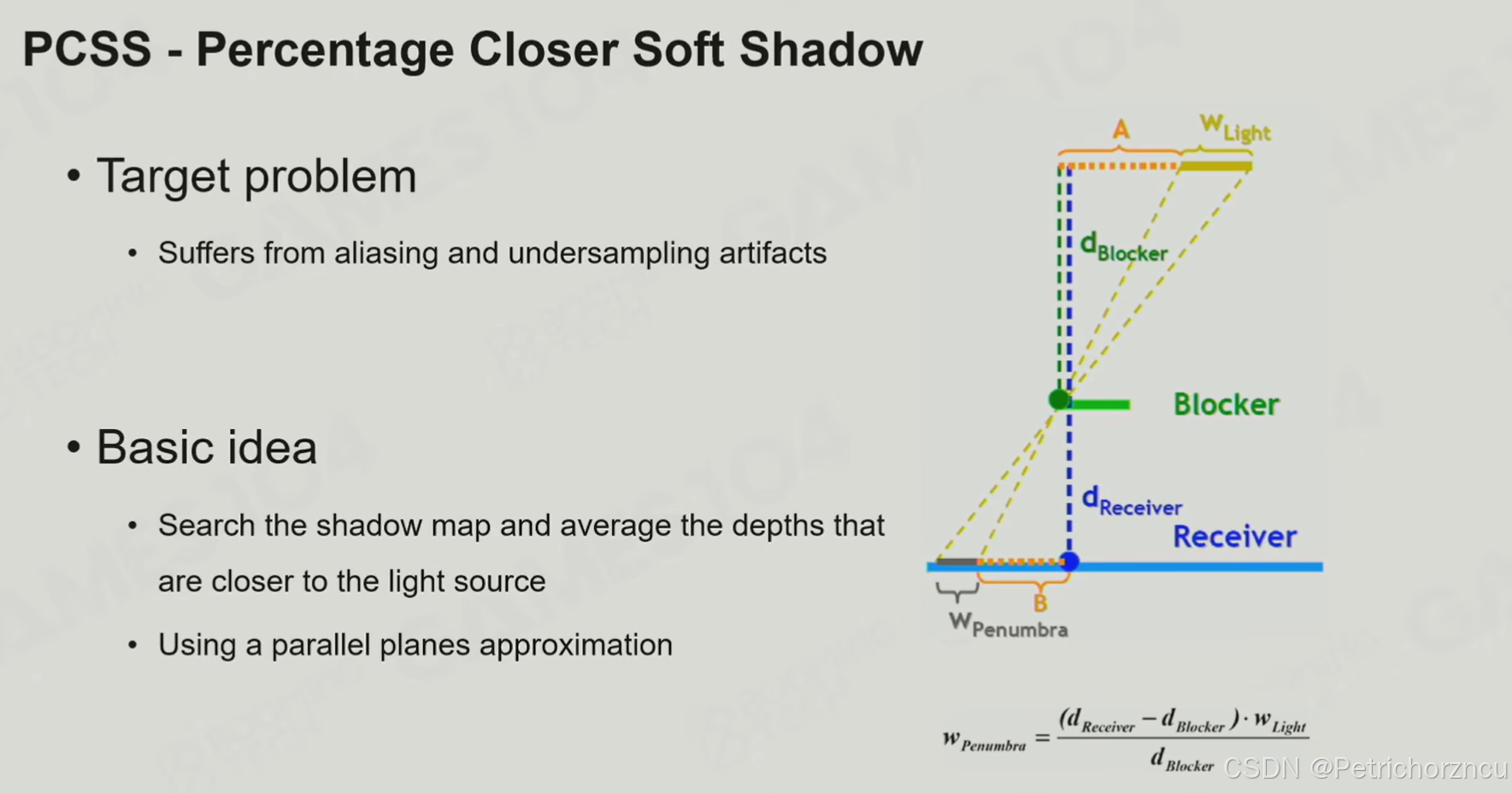
PCSS
很多引擎的标配
投影平面上的阴影到物体的距离越远,阴影越软、滤波核越大。
投影平面离物体越近,阴影越硬、滤波核越小。「即下图W越大,阴影越软」
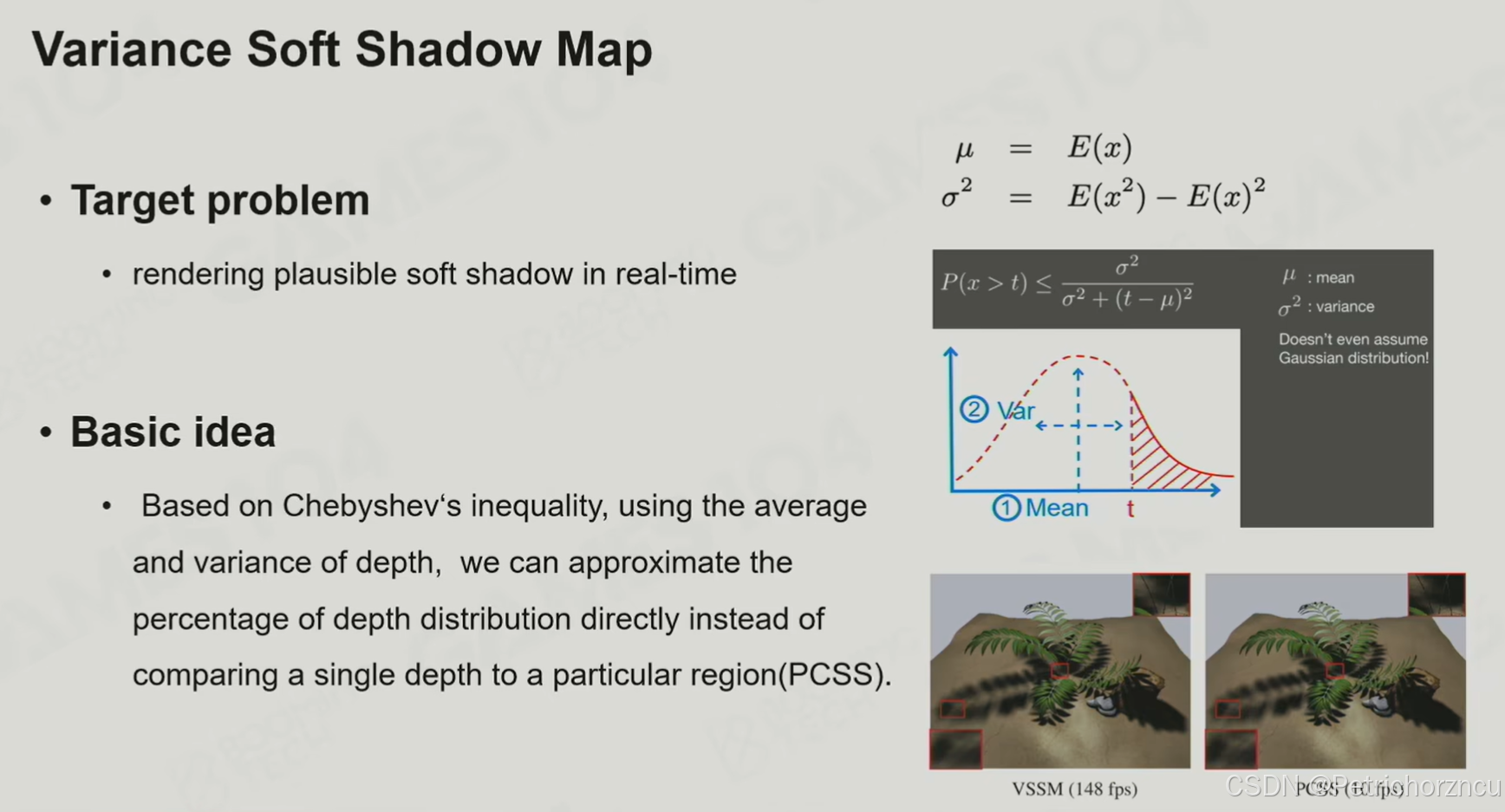
VSSM
技术展望
GPU显卡快速升级
real-time Ray-Tracing on GPU
Real-Time Global Illumination:SSGI、SDF based GI、Voxel-based GI(SVOG/VXGI)、RSM/RTX GI
更复杂的材质模型:BSSRDF、BSDF(Strand-based hair)
过量shader
艺术家搞出大量shadergraph
程序员给shader的各种变化都写了单独的shader(??不就是我们公司)
不同平台编译语言不同
Uber Shader:每一种变化组合都写入同一个shader,通过宏定义控制分支(会产生大量变体)
优点:某个算法改进时需要更新所有相关shader,容易出错,用Uber shader就不会有这个问题
Virtual Shadow Maps
原理:类似Tiled Virtual Texture
现代引擎可以关注这个方向
UE5中VirtualShadowMap的简易实现原理(一)
总结
5-10年前流行的3A配置:
Lightmap+LightProbe
PBR+IBL
Cascade shadow + VSSM