使用YOLO v5和Deep Sort实现车辆距离与相对速度检测
改进自单目距离检测
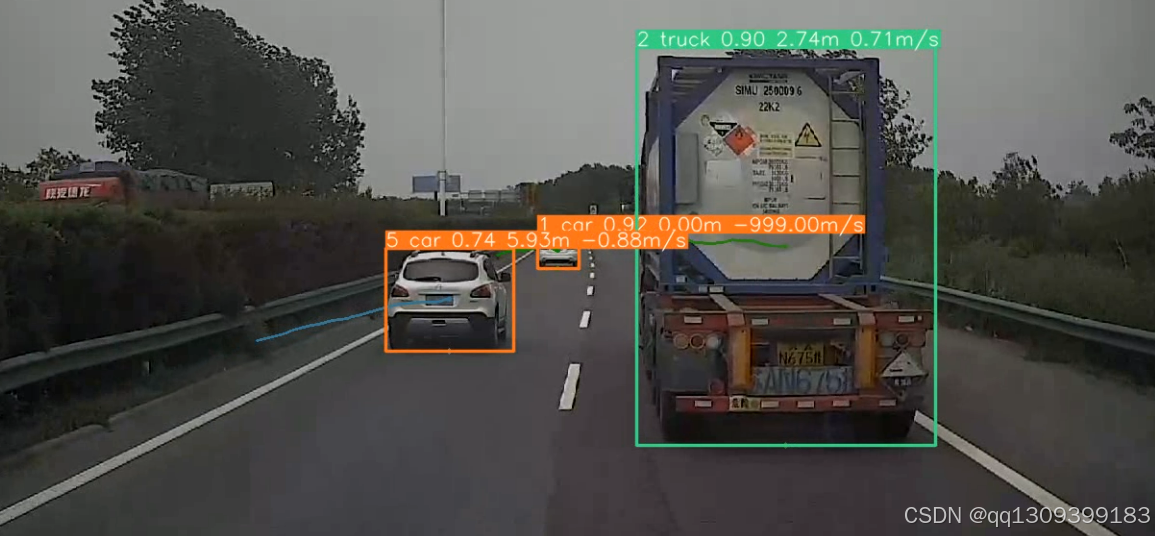
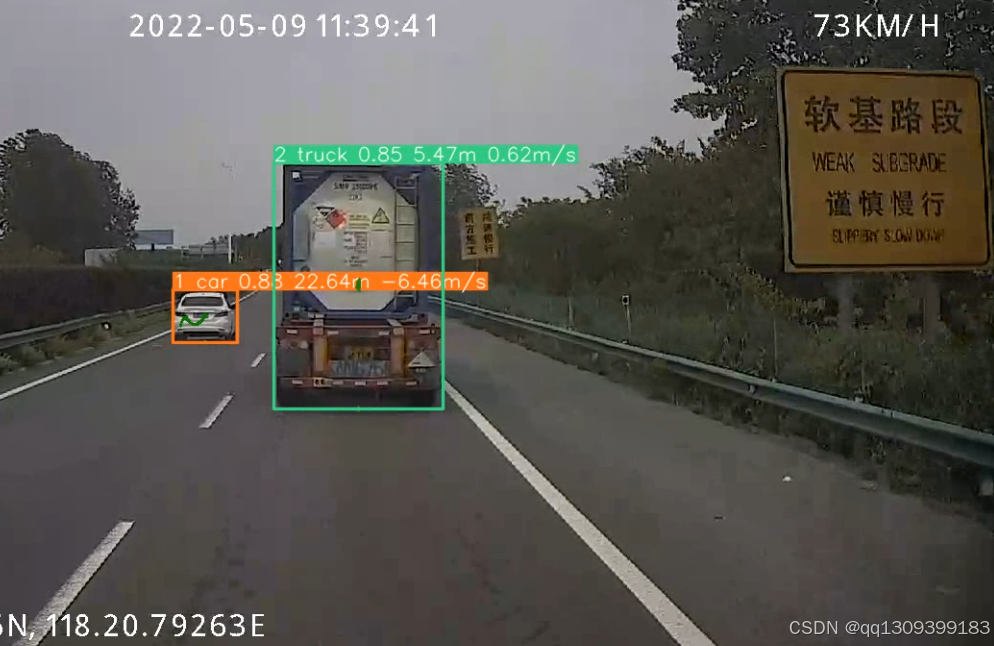
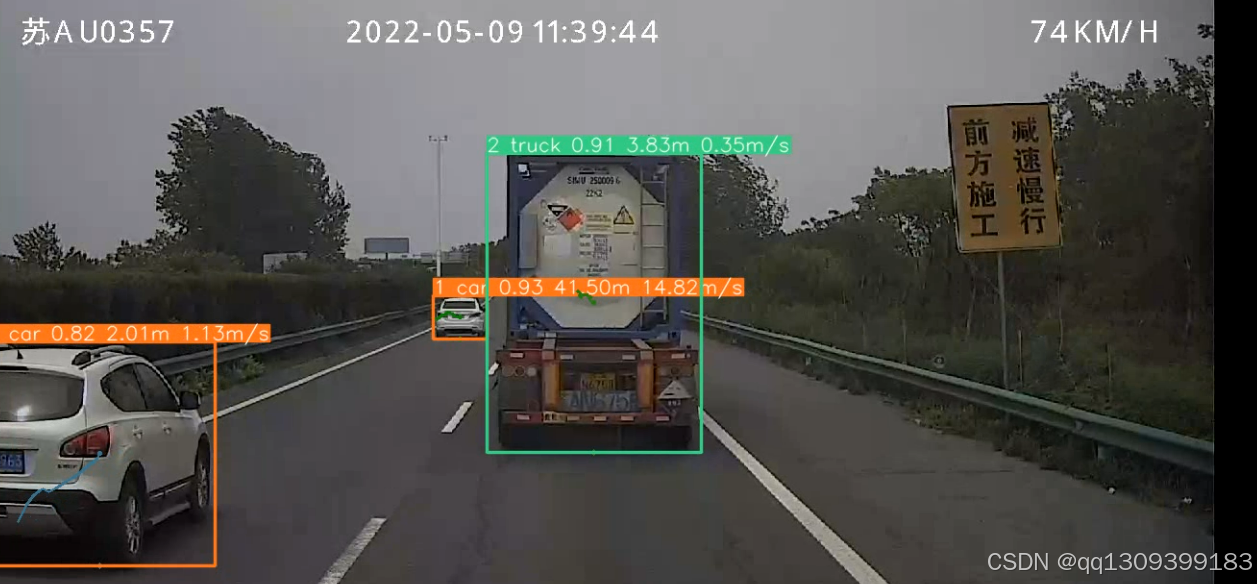
本项目基于YOLO v5和Deep Sort算法,旨在通过单目摄像头实时检测周围车辆的距离及其相对于摄像头载体的相对速度。这项技术对于智能交通系统、自动驾驶汽车以及交通安全监控等领域具有重要意义。本文将详细介绍该系统的安装配置、运行方法以及关键参数设置,并提供一些扩展功能以满足不同应用场景的需求。
视频演示
高清视频演示可以在[这里找到。
安装环境
为了确保程序能够顺利运行,请按照以下步骤进行环境搭建:
- Visual Studio 2019:用于编译CUDA代码,确保版本兼容于您的硬件。
- CUDA 和 cuDNN:安装合适的版本,以匹配您的GPU型号。例如,对于NVIDIA GeForce RTX 3060及以上显卡,建议使用CUDA 11.x及相应的cuDNN版本。
- Anaconda(推荐)或 Python >= 3.8:创建一个新的虚拟环境来隔离依赖项。
- PyTorch:在安装时,请检查Conda提供的包是否为GPU版本而不是CPU版本,这对于加速模型推理至关重要。
- 其他库:执行
pip install -r requirements.txt命令来安装所有必需的Python库。
注意:如果您使用的GPU是NVIDIA 3060或更高级别,应选择PyTorch >= 1.11版本。
权重/检查点文件
-`。
- Deep Sort 模型路径:默认存储在用户主目录下的
.cache/torch/checkpoints/。如果程序未能自动下载Deep Sort的检查点文件,请手动将checkpoints文件夹中的内容复制到上述路径中。
运行方式
要开始检测过程,可以使用以下命令行指令运行track.py脚本:
python track.py --source YOUR_PATH\demo.mp4 --yolo_model yolov5m.pt --deep_sort_model osnet_x1_0_imagenet --show-vid --save-vid --save-csv
其中,--yolo_model和--deep_sort_model参数可以根据需要替换为其他预训练模型。
批量处理
如果有多个视频文件位于同一文件夹内,可以通过修改并执行run.py来进行批量处理:
python run.py
输出结果
所有输出文件将保存至./runs/track/目录下。根据配置选项,这些文件可能包括视频录像、CSV格式的数据表等。
关键参数配置
在track.py中,有几个重要的参数影响着最终的结果质量:
-
画面分辨率:指定输入视频或图像的宽度(W)和高度(H)。默认值为1280x720像素。
W = 1280 H = 720 -
垂直高度:定义相机镜头中心到地面的高度(单位:米),这直接影响到距离计算的准确性。
camera_height = 0.4 # 相机离地面高度 -
角度:设定相机光轴与水平线之间的夹角,默认值为0度,意味着相机正对前方且无倾斜。
angle_a = 0 # 相机与水平线夹角 -
检测类别:当前配置仅针对行人、汽车、卡车、自行车、摩托车和公交车进行检测。若需添加新的目标类别,可编辑代码第301行和第325行附近的列表。
数据保存路径
如果启用了CSV文件保存功能,则必须更新保存路径,以确保数据能够正确写入:
if save_csv:
df = pd.DataFrame(storage)
df.to_excel('Your_path/test.xlsx', index=False)
扩展功能
除了基本的距离和速度检测外,我们还可以考虑以下几个方面来增强系统的实用性:
- 多传感器融合:结合LiDAR或其他类型的传感器,提高测距精度和鲁棒性。
- 天气条件适应性:优化算法以应对不同的光照条件和天气状况,如雨雪雾天。
- 动态场景理解:引入语义分割或实例分割技术,更好地理解和解释复杂的交通场景。
- 用户界面开发:构建一个图形化的用户界面(GUI),让用户更容易操作和查看结果。
- 实时性能提升:探索模型量化、剪枝等技术手段,在保证准确性的前提下降低计算资源消耗。
通过以上介绍,相信读者已经对如何利用YOLO v5和Deep Sort实现车辆距离与相对速度检测有了全面的认识。随着技术的发展,未来我们可以期待更多创新的应用和服务模式出现,进一步推动智能交通领域的发展。