前言
摘要:本文主要介绍雷达的基础知识
一、什么是雷达?
雷达,是英文Radar的音译,是radio detection and ranging的缩写,意思为“无线电探测和测距”,即用无线电的方法发现目标并测定它们的空间位置。雷达是利用电磁波探测目标的电子设备。雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、速度、角度等信息。
二、雷达分类
1.雷达分类方式介绍
雷达的种类繁多,分类的方法也非常复杂。有以下几种分类方式:
1.按照雷达信号形式分类,有脉冲雷达、连续波雷达(CW恒频连续波,用于测速; FSK频移键控连续波,可探测单个目标的距离和速度;FMCW调频连续波,探测多个目标的距离和速度。)、脉部压缩雷达和频率捷变雷达等。
2.按照角跟踪方式分类,有单脉冲雷达、圆锥扫描雷达和隐蔽圆锥扫描雷达等。
3.按照目标测量的参数分类,有测高雷达、二坐标雷达、三坐标雷达和敌我识对雷达、多站雷达等。
4.按照雷达采用的技术和信号处理的方式有相参积累和非相参积累、动目标显示、动目标检测、脉冲多普勒雷达、合成孔径雷达、边扫描边跟踪雷达。
5.按照天线扫描方式分类,分为机械扫描雷达、相控阵雷达等。
6.按雷达频段分,可分为超视距雷达、微波雷达、毫米波雷达以及激光雷达等。
2.毫米波雷达介绍
2.1 简介
毫米波雷达(millimeter-wave radar),工作在频率为30~300GHz,波长为1~10mm的雷达。
毫米波雷达优点:
- 成本适中,适度识别能力强,
- 不良天气抗干扰能力强。这是由于毫米波雷达波束窄、角分辨力高、频带宽、隐蔽性好。
- 对烟、尘、雨、雾等具有良好的穿透性。
毫米波雷达缺点:
- 可探测的角度较小
- 可测距离不如激光雷达
2.2 分类
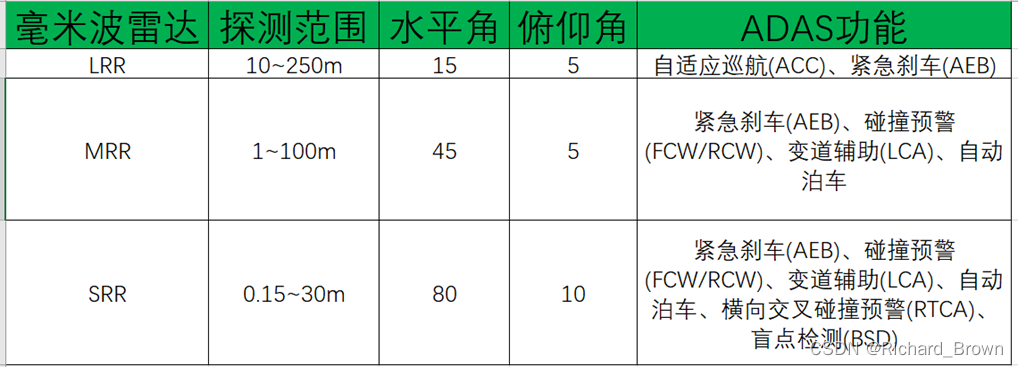
按照测量距离分类:
LRR:Long range radar 长距雷达;用作车载的前向雷达
MRR:Medium range radar 中距雷达 ;用作角雷达
SRR:Short range radar 短距雷达;用作角雷达
2.2 毫米波、激光和超声波雷达对比
激光雷达优点:探测精度高、探测范围广及稳定性强
激光雷达缺点:成本高,抗干扰能力差,无法在雨雪雾霾天,沙尘暴等恶劣天气中开启。

总结
随着汽车行业的高速发展,自动驾驶领域成为新的趋势,雷达多用作自动驾驶辅助系统的自适应巡航(ACC)、紧急刹车(AEB)、碰撞预警(FCW/RCW)、变道辅助(LCA)和盲点检测(BSD)等。
注:常用自动驾驶辅助系统的缩写词
ADAS:Advanced driver assistance system 高级驾驶辅助系统
ACC:Adaptive Cruise Contro 自适应巡航控制
AEB:Automatic emergency braking 自动紧急刹车
BSD:Blind spot detection 盲点监测
RCTA:Rear Cross Traffic Alert 后方横向交叉碰撞预警
LCA:Lane change assist 变道辅助系统
FCW:Front collision warning 前撞告警系统
RCW:Rear collision warning 后碰撞预警系统