一、pytorch的基础学习
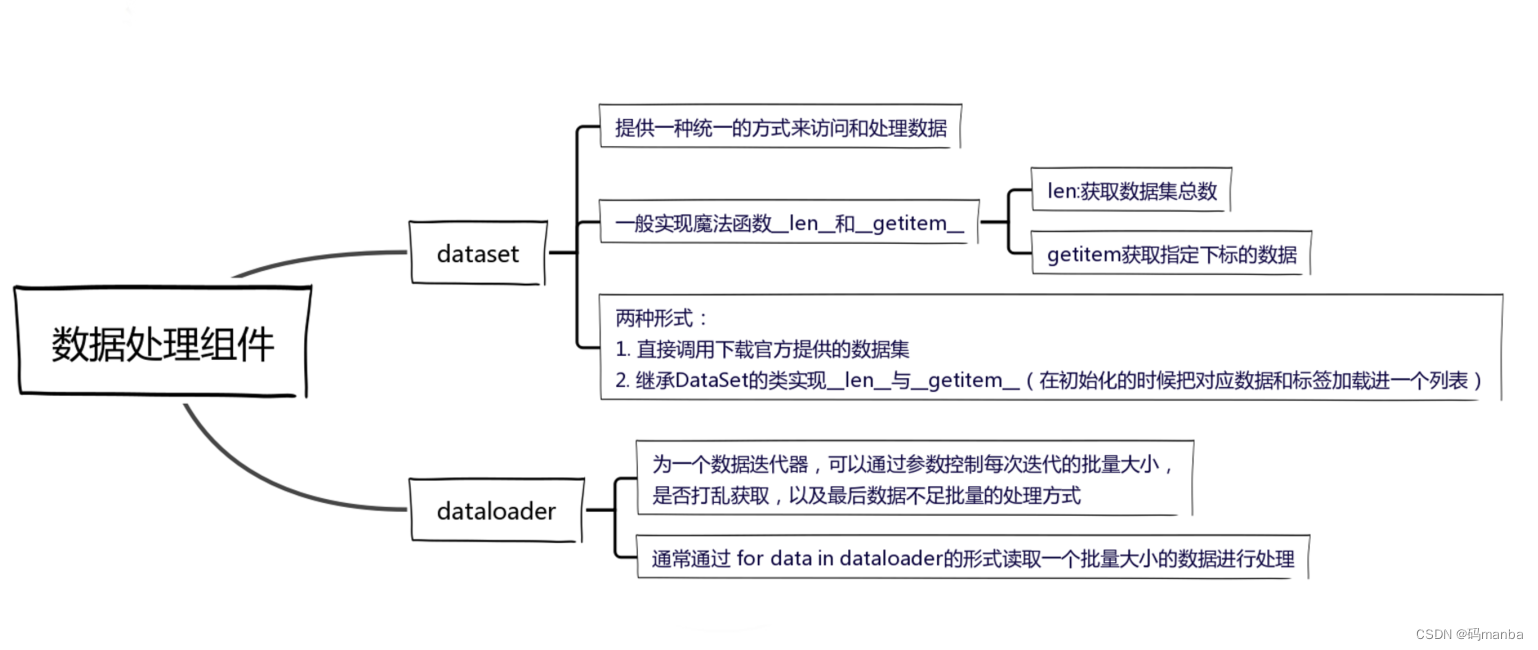
1.1 dataset与dataloader
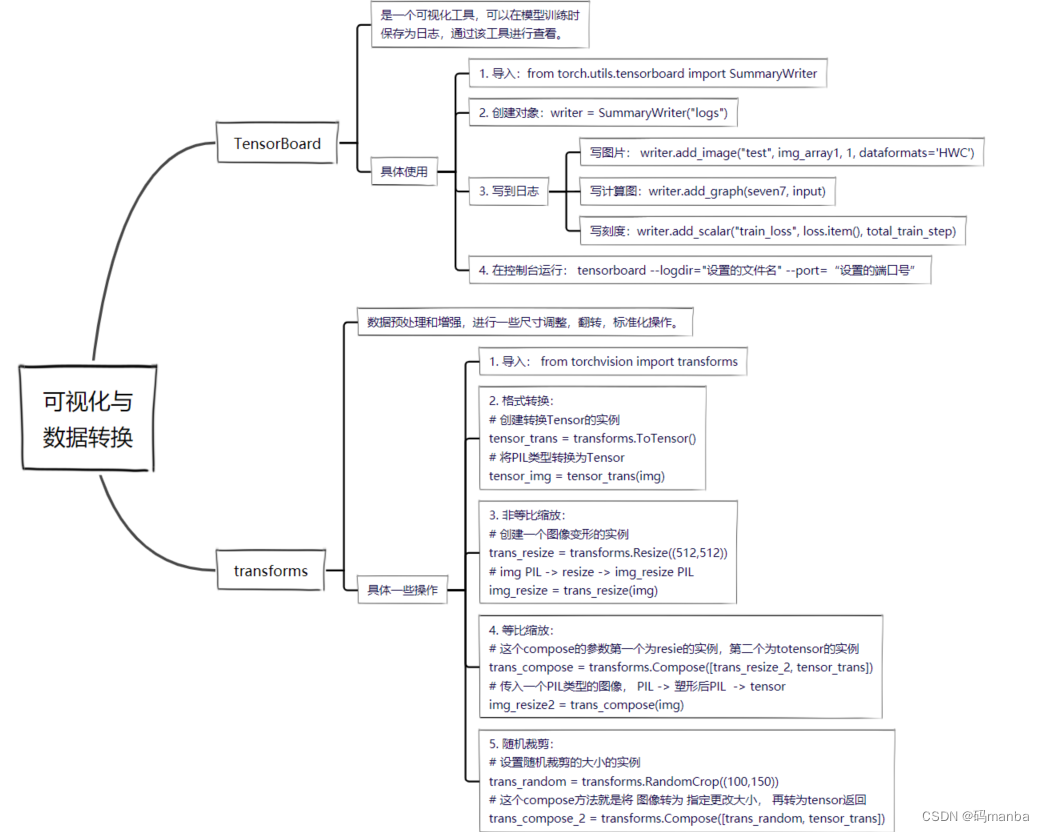
1.2 可视化工具(tensorboard)、数据转换工具(transforms)
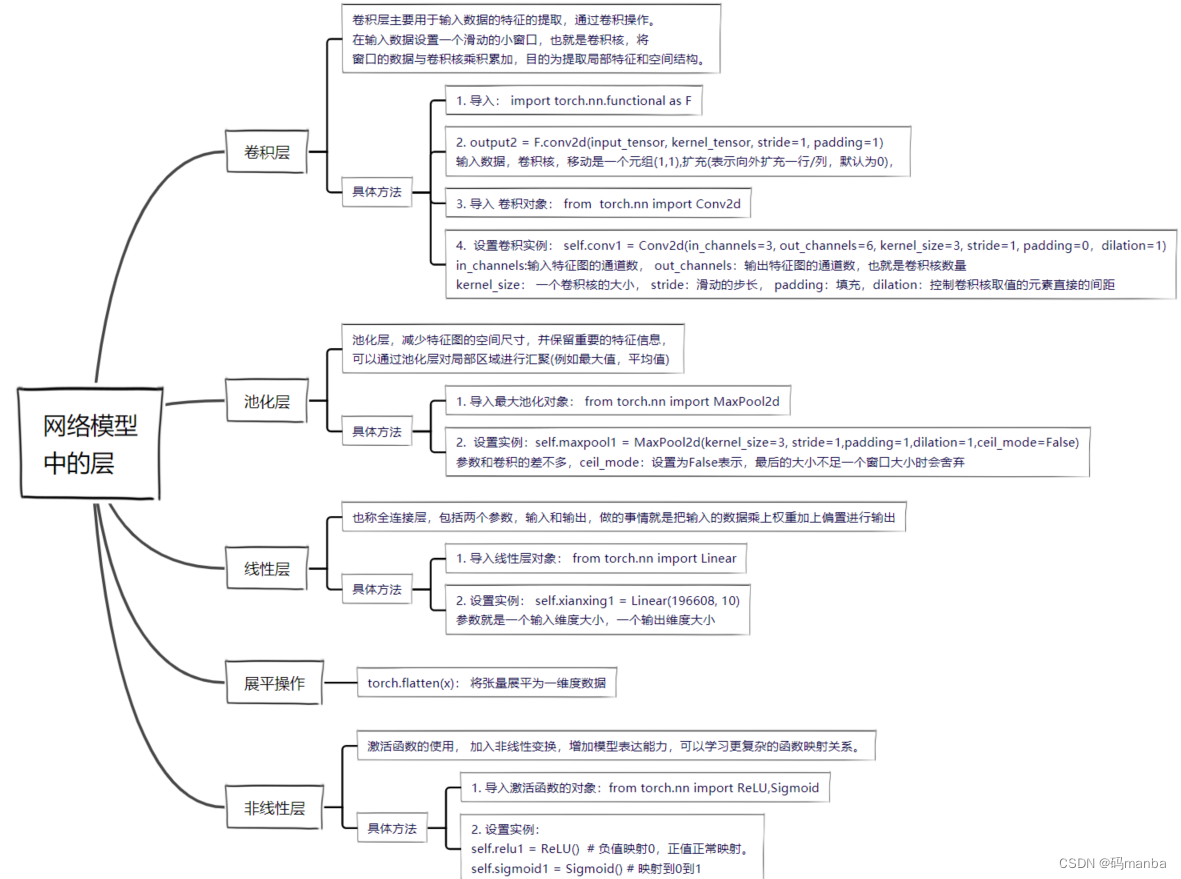
1.3 卷积、池化、线性层、激活函数
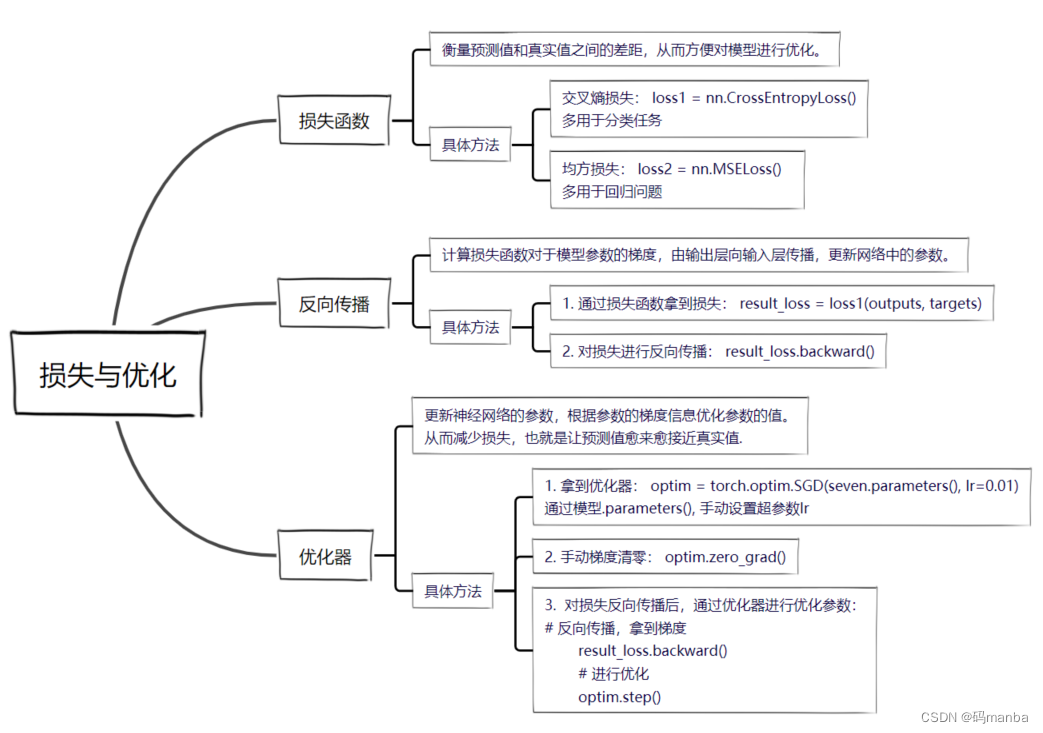
1.4 损失函数、反向传播、优化器
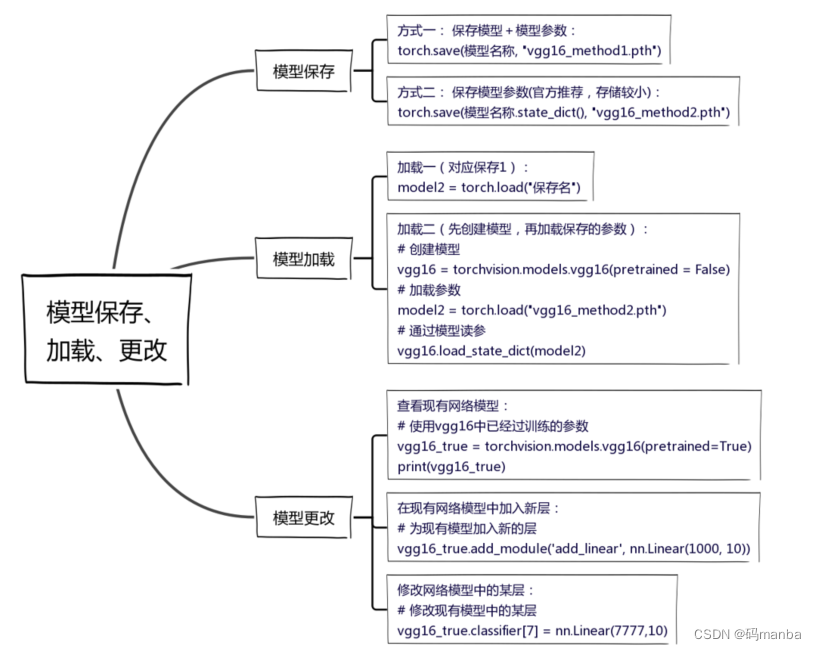
1.5 模型的保存、加载、修改
二、 pytorch分类项目实现
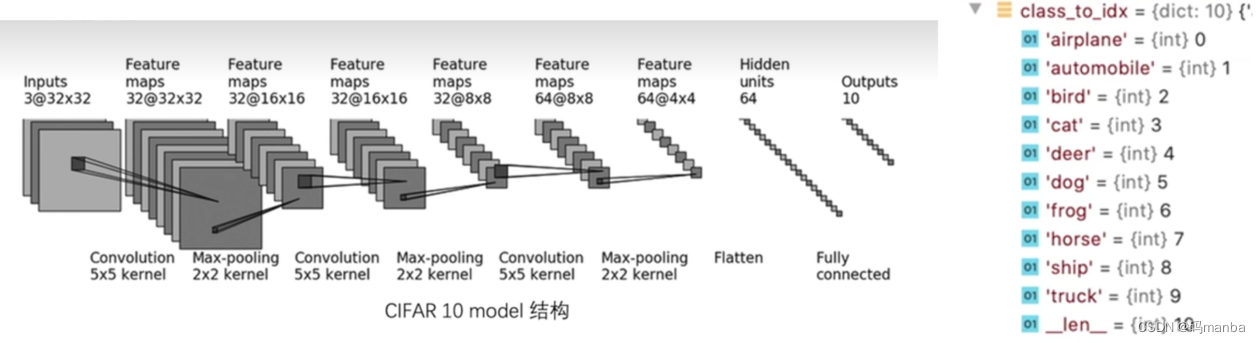
2.1 网络模型
2.2 具体代码
- model与train
import torch
import torchvision
from torch.utils.tensorboard import SummaryWriter
from torch import nn
from torch.utils.data import DataLoader
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
train_data = torchvision.datasets.CIFAR10(root="../data", train=True, transform=torchvision.transforms.ToTensor(), download=True)
test_data = torchvision.datasets.CIFAR10(root="../data", train=False, transform=torchvision.transforms.ToTensor(), download=True)
train_data_size = len(train_data)
test_data_size = len(test_data)
print("训练数据集合的长度为:{}".format(train_data_size))
print("测试数据集合的长度为:{}".format(test_data_size))
train_dataloader = DataLoader(dataset=train_data, batch_size=64)
test_dataloader = DataLoader(dataset=test_data, batch_size=64)
class Seven(nn.Module):
def __init__(self):
super(Seven, self).__init__()
self.model = nn.Sequential(
nn.Conv2d(3,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,64,5,1,2),
nn.MaxPool2d(2),
nn.Flatten(),
nn.Linear(64*4*4, 64),
nn.Linear(64, 10)
)
def forward(self, x):
x = self.model(x)
return x
seven = Seven()
seven.to(device)
loss_fn = nn.CrossEntropyLoss()
loss_fn.to(device)
learning_rate = 1e-2
optimizer = torch.optim.SGD(seven.parameters(), lr=learning_rate)
total_train_step = 0
total_test_step = 0
epochs = 10
writer = SummaryWriter("./logs_train")
for epoch in range(epochs):
print("第{}轮测试开始".format(epoch+1))
seven.train()
for data in train_dataloader:
imgs, targets = data
imgs = imgs.to(device)
targets = targets.to(device)
outputs = seven(imgs)
loss = loss_fn(outputs, targets)
optimizer.zero_grad()
loss.backward()
optimizer.step()
total_train_step += 1
if total_train_step % 100 == 0:
print("训练次数:{},loss:{}".format(total_train_step, loss.item()))
writer.add_scalar("train_loss", loss.item(), total_train_step)
seven.eval()
total_test_loss = 0
total_accuracy = 0
with torch.no_grad():
for data in test_dataloader:
imgs, targets = data
imgs = imgs.to(device)
targets = targets.to(device)
outputs = seven(imgs)
loss = loss_fn(outputs, targets)
total_test_loss = total_test_loss + loss.item()
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy = total_accuracy + accuracy
print("整体数据集的Loss:{}".format(total_test_loss))
print("整体测试集上的正确率:{}".format(total_accuracy/test_data_size))
writer.add_scalar("test_loss", total_test_loss, total_test_step)
writer.add_scalar("test_accuracy", total_accuracy/test_data_size, total_test_step)
total_test_step +=1
torch.save(seven, "seven_{}.pth".format(epoch))
print("第{}次模型保存".format(epoch))
writer.close()
- test
import torch
import torchvision
from PIL import Image
from torch import nn
image_path = "./imgs/feiji.jpg"
image = Image.open(image_path)
print(image)
transform = torchvision.transforms.Compose([torchvision.transforms.Resize((32,32)),
torchvision.transforms.ToTensor()])
image = transform(image)
print(image.shape)
class Seven(nn.Module):
def __init__(self):
super(Seven, self).__init__()
self.model = nn.Sequential(
nn.Conv2d(3,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,32,5,1,2),
nn.MaxPool2d(2),
nn.Conv2d(32,64,5,1,2),
nn.MaxPool2d(2),
nn.Flatten(),
nn.Linear(64*4*4, 64),
nn.Linear(64, 10)
)
def forward(self, x):
x = self.model(x)
return x
model = torch.load("seven_9.pth", map_location=torch.device('cpu'))
print(model)
image = torch.reshape(image, (1,3,32,32))
model.eval()
with torch.no_grad():
output = model(image)
print(output)
print(output.argmax(1))