YOLOv11v10v8使用教程: YOLOv11入门到入土使用教程
YOLOv11改进汇总贴:YOLOv11及自研模型更新汇总
《PIDNet: A Real-time Semantic Segmentation Network Inspired by PID Controllers》
一、 模块介绍
论文链接:https://arxiv.org/pdf/2206.02066
代码链接:https://github.com/XuJiacong/PIDNet
论文速览:
双分支网络架构在实时语义分割任务中显示出其效率和有效性。然而,高分辨率细节和低频上下文的直接融合有一个缺点,即细节特征很容易被周围的上下文信息所淹没。这种超调现象限制了现有双分支模型分割精度的提高。在本文中,我们在卷积神经网络 (CNN) 和比例积分微分 (PID) 控制器之间建立了联系,并揭示了双分支网络相当于比例积分 (PI) 控制器,后者本身存在类似的过冲问题。为了缓解这个问题,我们提出了一种新的三分支网络架构:PIDNet,它包含三个分支,分别解析 detailed、context 和 boundary 信息,并采用边界关注来指导 detailed 和 context 分支的融合。我们的 PIDNet 系列在推理速度和准确性之间实现了最佳平衡,其准确性超过了 Cityscapes 和 CamVid 数据集上具有相似推理速度的所有现有模型。具体来说,PIDNet-S 在城市景观上实现了 78.6% 的 mIOU,推理速度为 93.2 FPS,在 CamVid 上实现了 80.1% 的 mIOU,速度为 153.7 FPS。
总结:作者代码中的PagFM可以凭替Concat模块。
二、 加入到YOLO中
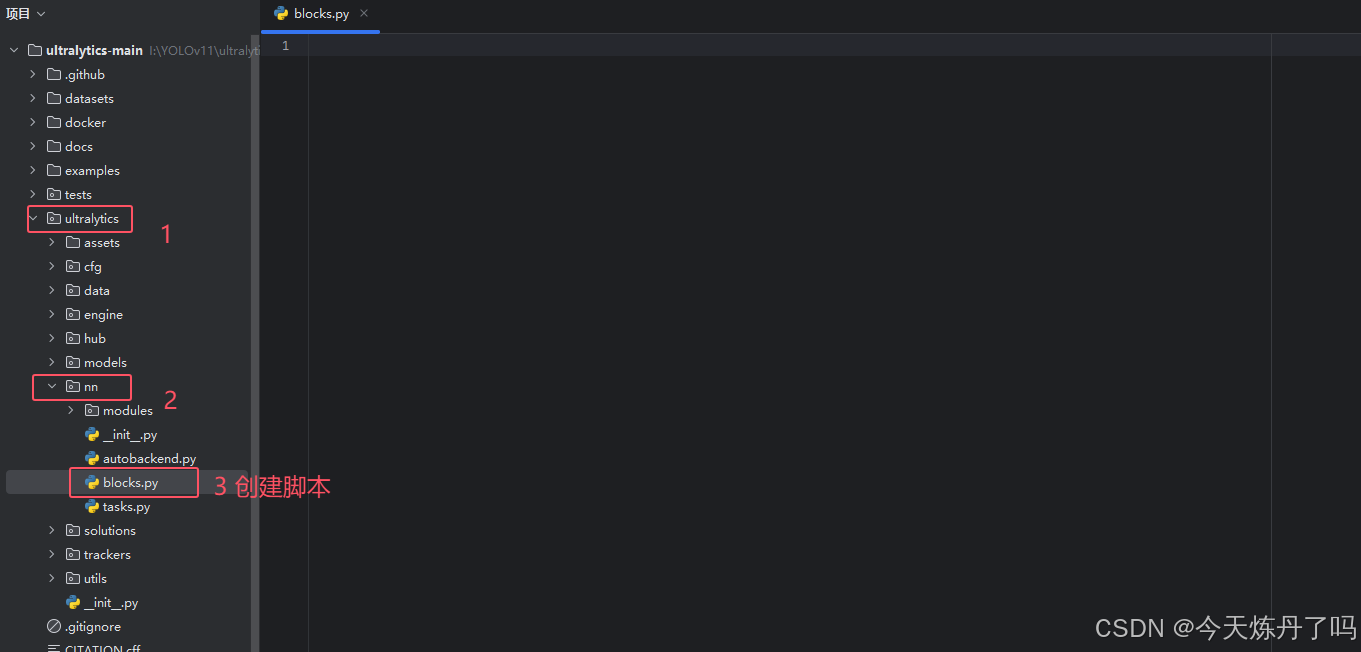
2.1 创建脚本文件
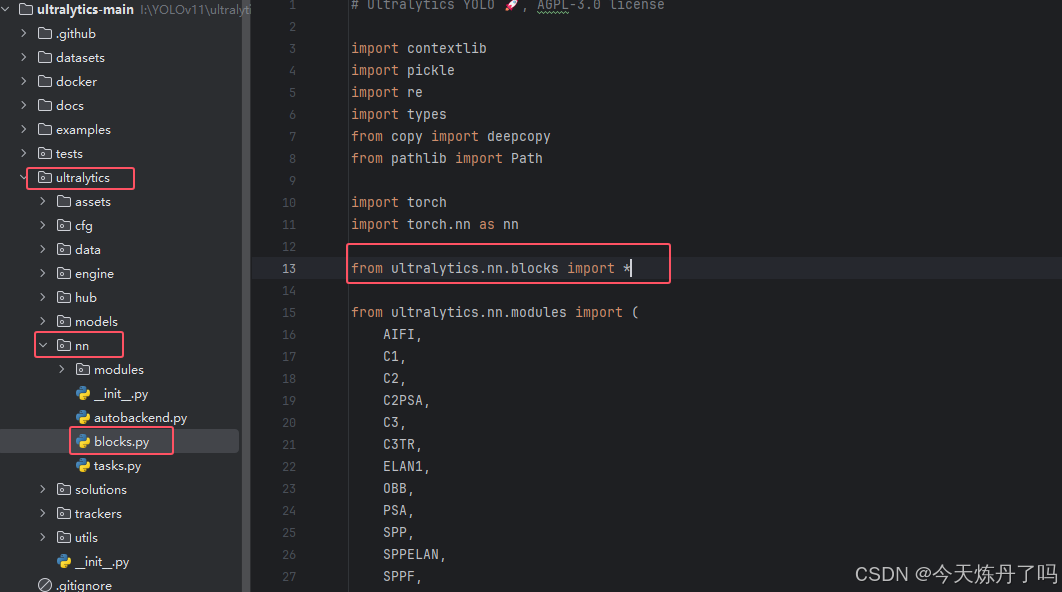
首先在ultralytics->nn路径下创建blocks.py脚本,用于存放模块代码。
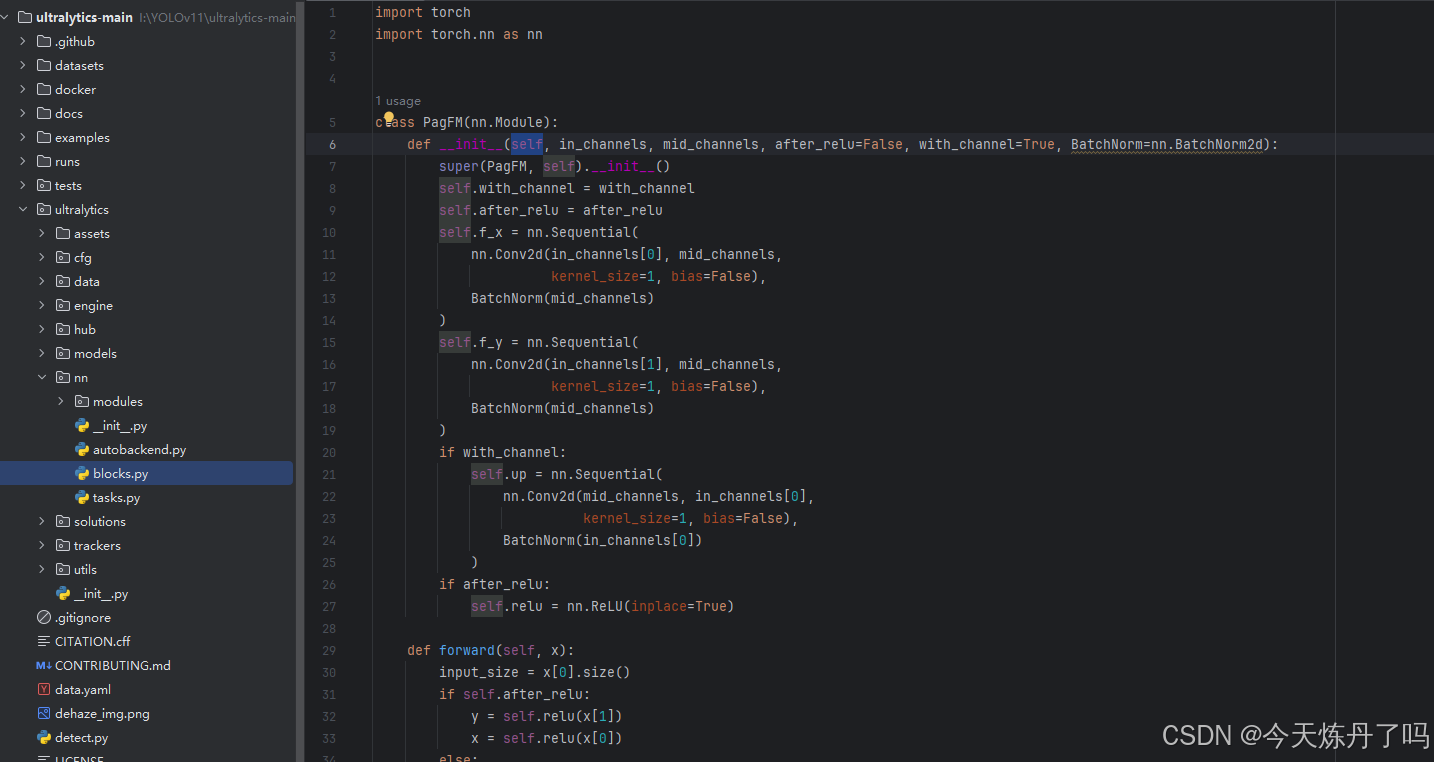
2.2 复制代码
复制代码粘到刚刚创建的blocks.py脚本中,如下图所示:
import torch
import torch.nn as nn
import torch.nn.functional as F
class PagFM(nn.Module):
def __init__(self, in_channels, mid_channels, after_relu=False, with_channel=True, BatchNorm=nn.BatchNorm2d):
super(PagFM, self).__init__()
self.with_channel = with_channel
self.after_relu = after_relu
self.f_x = nn.Sequential(
nn.Conv2d(in_channels[0], mid_channels,
kernel_size=1, bias=False),
BatchNorm(mid_channels)
)
self.f_y = nn.Sequential(
nn.Conv2d(in_channels[1], mid_channels,
kernel_size=1, bias=False),
BatchNorm(mid_channels)
)
if with_channel:
self.up = nn.Sequential(
nn.Conv2d(mid_channels, in_channels[0],
kernel_size=1, bias=False),
BatchNorm(in_channels[0])
)
if after_relu:
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
input_size = x[0].size()
if self.after_relu:
y = self.relu(x[1])
x = self.relu(x[0])
else:
y = x[1]
x = x[0]
y_q = self.f_y(y)
y_q = F.interpolate(y_q, size=[input_size[2], input_size[3]],
mode='bilinear', align_corners=False)
x_k = self.f_x(x)
if self.with_channel:
sim_map = torch.sigmoid(self.up(x_k * y_q))
else:
sim_map = torch.sigmoid(torch.sum(x_k * y_q, dim=1).unsqueeze(1))
y = F.interpolate(y, size=[input_size[2], input_size[3]],
mode='bilinear', align_corners=False)
x = (1 - sim_map) * x + sim_map * y
return x
2.3 更改task.py文件
打开ultralytics->nn->modules->task.py,在脚本空白处导入函数。
from ultralytics.nn.blocks import *
之后找到模型解析函数parse_model(约在tasks.py脚本中940行左右位置,可能因代码版本不同变动),在该函数的最后一个else分支上面增加相关解析代码。
elif m is PagFM:
c2 = ch[f[0]]
args = [[ch[f[0]], ch[f[1]]], *args]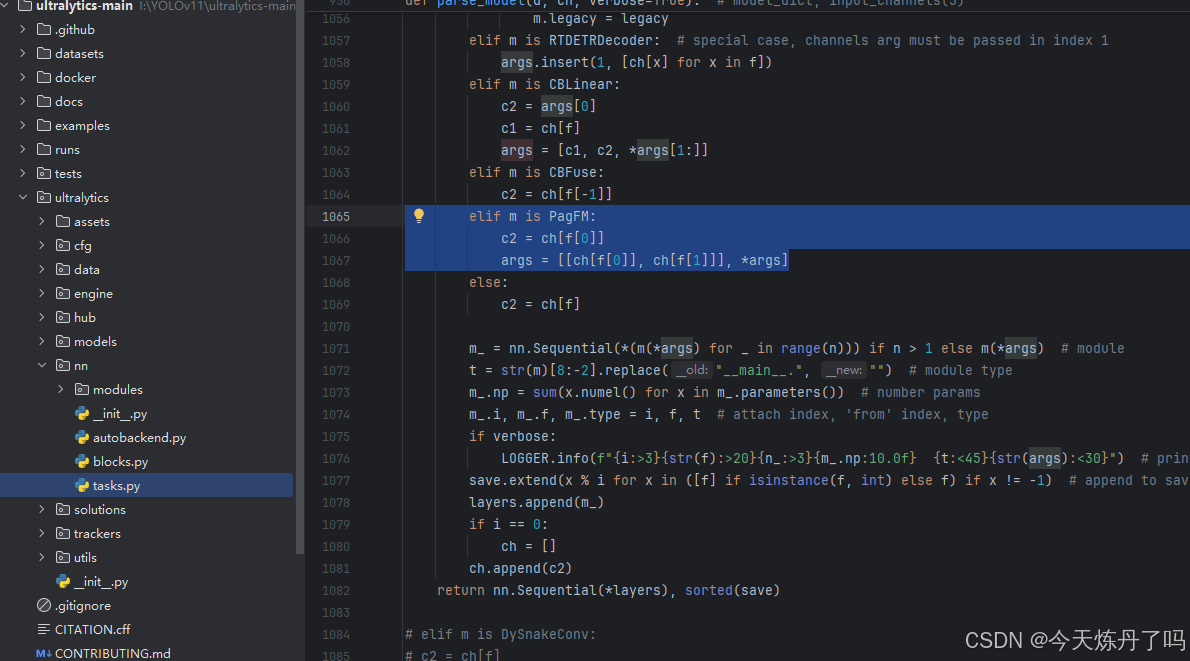
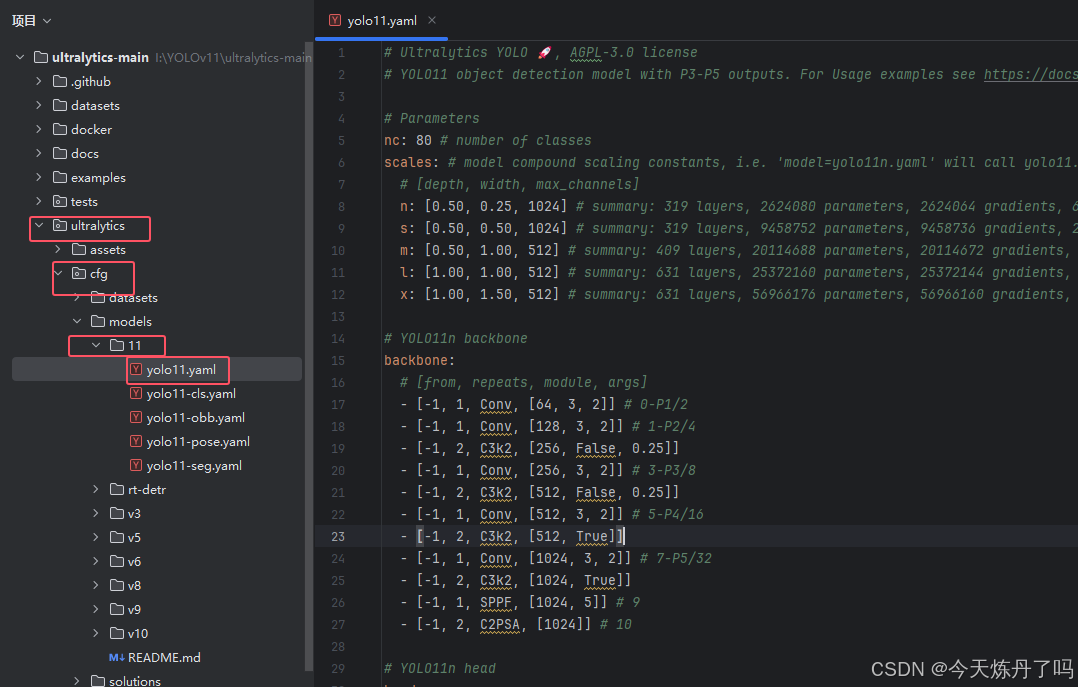
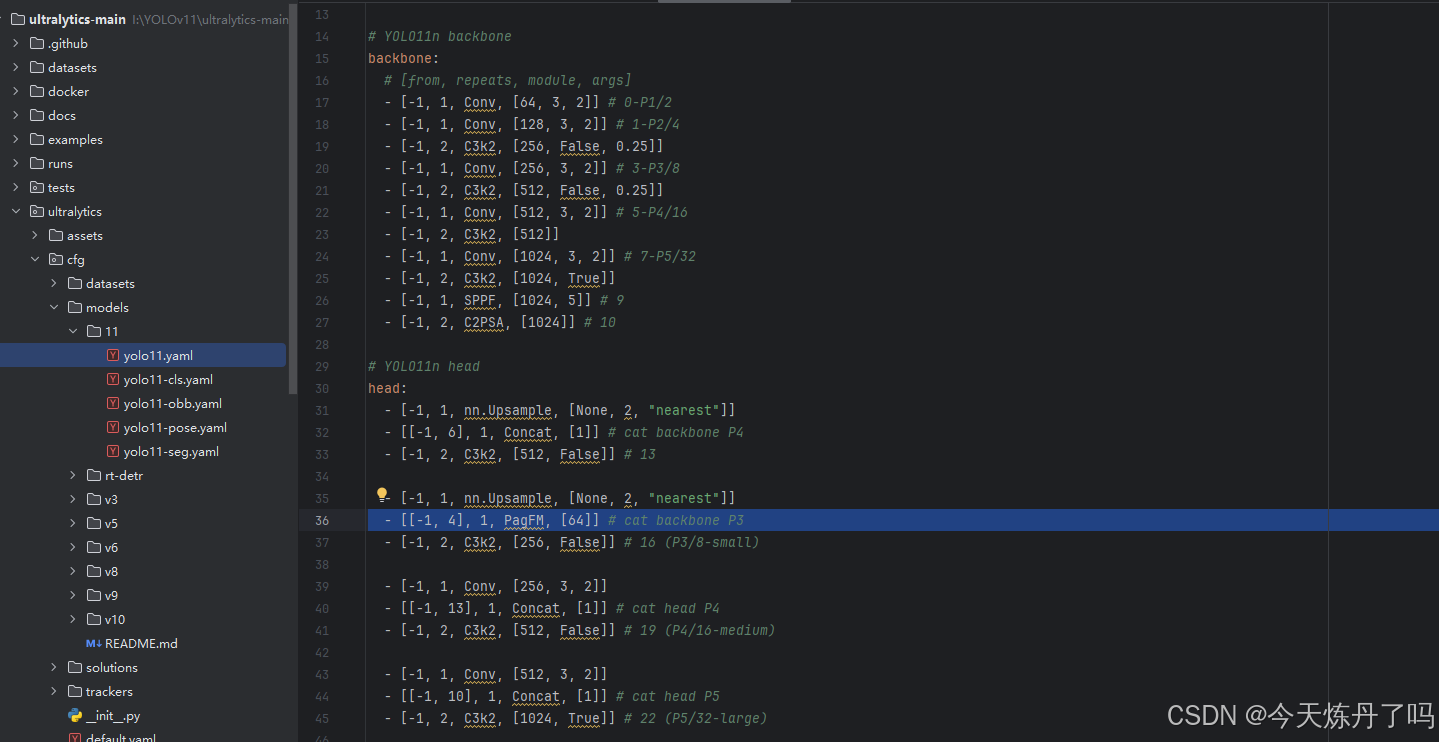
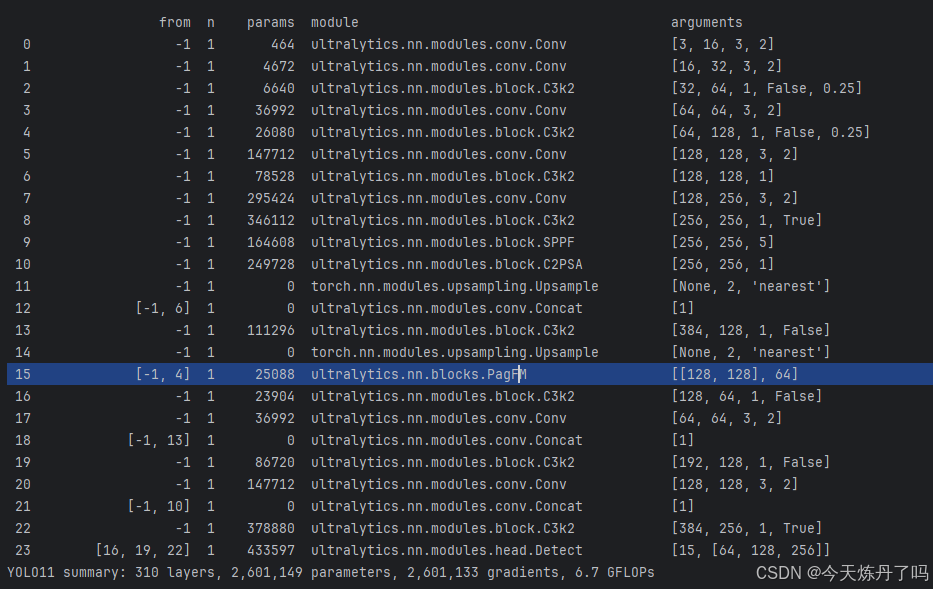
2.4 更改yaml文件
打开更改ultralytics/cfg/models/11路径下的YOLOv11.yaml文件,替换原有模块。(放在该位置仅能插入该模块,具体效果未知。博主精力有限,仅完成与其他模块二次创新融合的测试,结构图见文末,代码见群文件更新。)
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLO11 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolo11n.yaml' will call yolo11.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 319 layers, 2624080 parameters, 2624064 gradients, 6.6 GFLOPs
s: [0.50, 0.50, 1024] # summary: 319 layers, 9458752 parameters, 9458736 gradients, 21.7 GFLOPs
m: [0.50, 1.00, 512] # summary: 409 layers, 20114688 parameters, 20114672 gradients, 68.5 GFLOPs
l: [1.00, 1.00, 512] # summary: 631 layers, 25372160 parameters, 25372144 gradients, 87.6 GFLOPs
x: [1.00, 1.50, 512] # summary: 631 layers, 56966176 parameters, 56966160 gradients, 196.0 GFLOPs
# YOLO11n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 2, C3k2, [256, False, 0.25]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 2, C3k2, [512, False, 0.25]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 2, C3k2, [512]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 2, C3k2, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
- [-1, 2, C2PSA, [1024]] # 10
# YOLO11n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2, [512, False]] # 13
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 4], 1, PagFM, [64]] # cat backbone P3
- [-1, 2, C3k2, [256, False]] # 16 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 13], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2, [512, False]] # 19 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 10], 1, Concat, [1]] # cat head P5
- [-1, 2, C3k2, [1024, True]] # 22 (P5/32-large)
- [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)
2.5 修改train.py文件
创建Train脚本用于训练。
from ultralytics.models import YOLO
import os
os.environ['KMP_DUPLICATE_LIB_OK'] = 'True'
if __name__ == '__main__':
model = YOLO(model='ultralytics/cfg/models/11/yolo11.yaml')
# model.load('yolov8n.pt')
model.train(data='./data.yaml', epochs=2, batch=1, device='0', imgsz=640, workers=2, cache=False,
amp=True, mosaic=False, project='runs/train', name='exp')
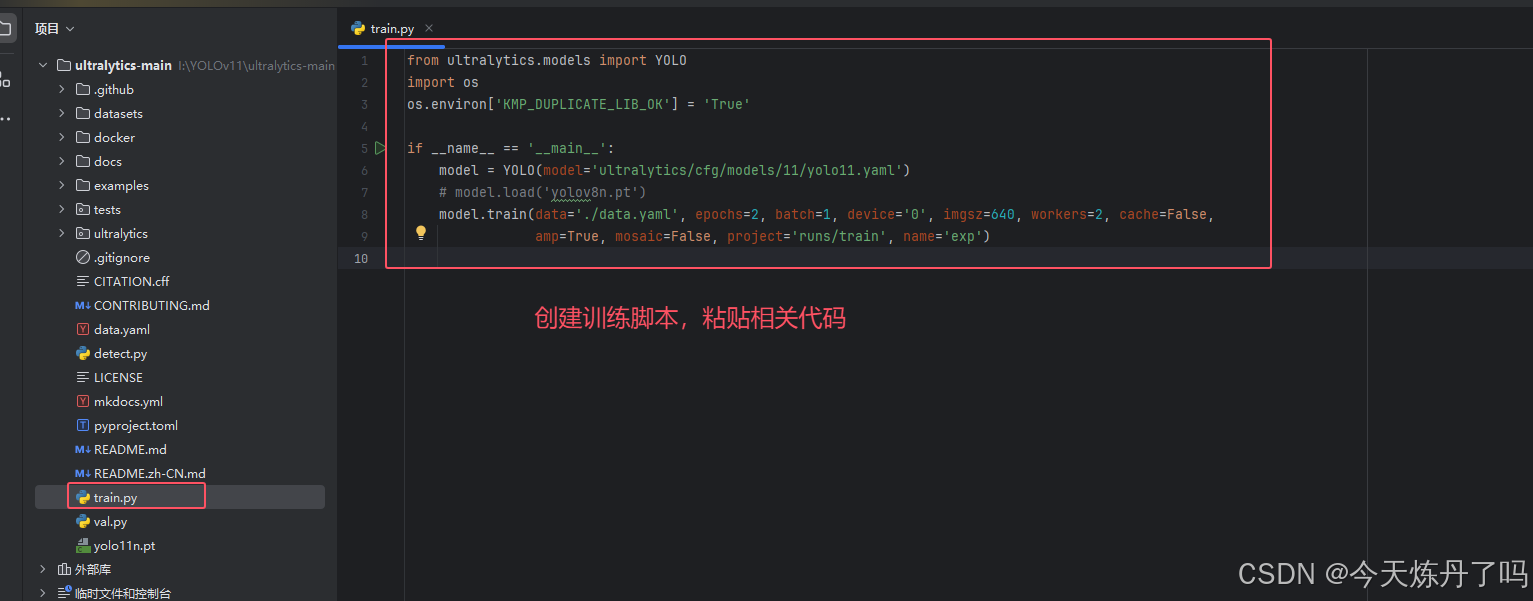
在train.py脚本中填入修改好的yaml路径,运行即可训练,数据集创建教程见下方链接。
三、相关改进思路(2024/11/23日群文件)
⭐另外,融合上百种深度学习改进模块的YOLO项目仅119(含百种改进的v9),RTDETR119,含高性能自研模型,更易发论文,代码每周更新,欢迎点击下方小卡片加我了解。⭐
⭐⭐平均每个文章对应4-6个二创及自研融合模块⭐⭐