我们在移植FreeRTOS过程中如果没有printf()函数打印调试信息到串口精灵,则程序开发就会非常不方便。本文实现STM32工程上的printf()函数,方便用于程序开发中调试信息打印到电脑上的串口调试精灵。
最简单的方法就是使用MicroLIB库。
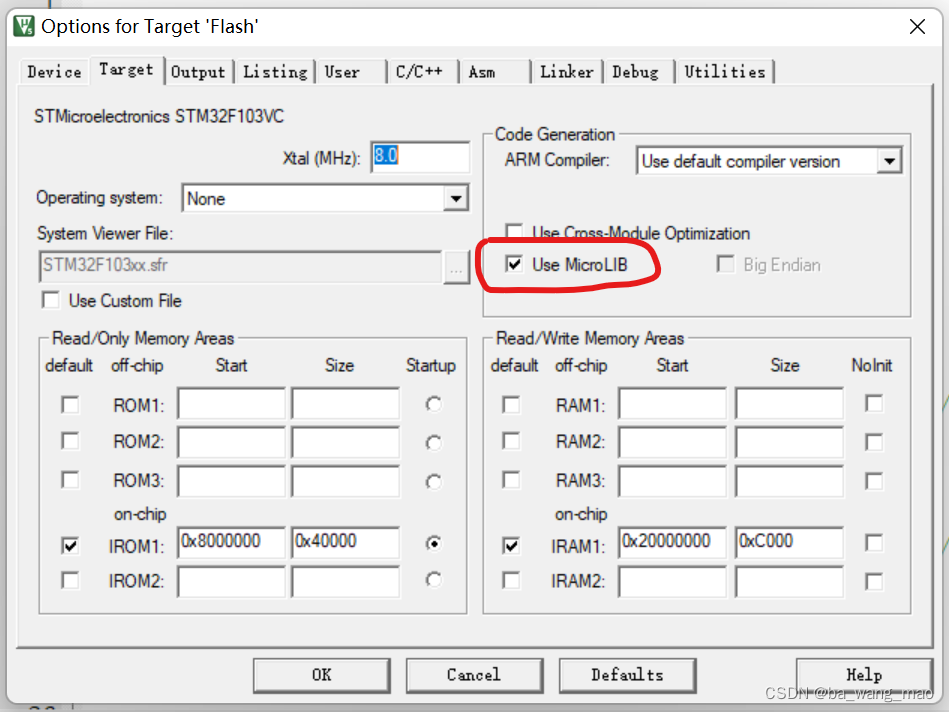
一、KEIL-MDK中勾选Use MicroLIB选项
在MDK开发环境中,勾选Use MicroLIB选项。
MicroLib是缺省c库的备选库,它可装入少量内存中,与嵌入式应用程序配合使用,且这些应用程序不在操作系统中运行。
MicroLib进行了高度优化以使代码变得很小,功能比缺省c库少,不具备某些ISO c特性,部分库函数的运行速度也比较慢,如内存拷贝函数memcpy()。
MicroLib与缺省c库之间的主要差异在网上有许多文章都有写到,这里摘抄记录:
(1)MicroLib 不符合 ISO C 库标准。 不支持某些 ISO 特性,并且其他特性具有的功能也较少。
(2)MicroLib 不符合 IEEE 754 二进制浮点算法标准。
(3)MicroLib 进行了高度优化以使代码变得很小。
(4)无法对区域设置进行配置。 缺省 C 区域设置是唯一可用的区域设置。
(5)不能将 main() 声明为使用参数,并且不能返回内容。
(6)不支持 stdio,但未缓冲的 stdin、stdout 和 stderr 除外。
(7)MicroLib对 C99 函数提供有限的支持。
(8)MicroLib不支持操作系统函数。
(9)MicroLib不支持与位置无关的代码。
(10)MicroLib不提供互斥锁来防止非线程安全的代码。
(11)MicroLib不支持宽字符或多字节字符串。
(12)与stdlib不同,MicroLib不支持可选择的单或双区内存模型。MicroLib只提供双区内存模型,即单独的堆栈和堆区。
MicroLib提供了一个有限的stdio子系统,它仅支持未缓冲的stdin、stdout和stderr,那么也就是说勾选了Use MicroLib选项后,在代码工程中就可以使用printf()函数吗?
然而事实并非如此,这样直接使用printf()函数,其打印的字符串最终不知道打印到何处。我们要做的是将调试信息打印到USART3中,所以需要对printf()函数所依赖的打印输出函数fputc()重定向(MicroLib中的printf()函数打印操作依赖fputc())。
二、重定向fputc函数
在MicroLib的stdio.h中,fputc()函数的原型为:
int fputc(int ch, FILE* stream)
1、重定向fputc()函数
此函数原本是将字符ch打印到文件指针stream所指向的文件流去的,现在我们不需要打印到文件流,而是打印到串口3。因此重定向到串口3的代码如下:
//
// 函 数 名: fputc
// 功能说明: 重定义putc函数,这样可以使用printf函数从串口3打印输出
// 形 参: 无
// 返 回 值: 无
//
int fputc(int ch, FILE *f)
{
USART_SendData(USART3, (uint8_t) ch);
// 等待发送结束
while (USART_GetFlagStatus(USART3, USART_FLAG_TC) == RESET);
return ch;
}2、编写串口3端口初始化程序
static void print_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// 第1步: 开启GPIO和UART时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
// 第2步:将USART Tx的GPIO配置为推挽复用模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 第3步:将USART Rx的GPIO配置为浮空输入模式
// 由于CPU复位后,GPIO缺省都是浮空输入模式,因此下面这个步骤不是必须的
// 但是,我还是建议加上便于阅读,并且防止其它地方修改了这个口线的设置参数
//
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 第3步已经做了,因此这步可以不做
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
//
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 第4步: 配置串口硬件参数
USART_InitStructure.USART_BaudRate = 57600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART3, &USART_InitStructure);
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); // 使能接收中断
//
// USART_ITConfig(USART1, USART_IT_TXE, ENABLE);
// 注意: 不要在此处打开发送中断
// 发送中断使能在SendUart()函数打开
//
USART_Cmd(USART3, ENABLE); // 使能串口
// CPU的小缺陷:串口配置好,如果直接Send,则第1个字节发送不出去
// 如下语句解决第1个字节无法正确发送出去的问题
USART_ClearFlag(USART3, USART_FLAG_TC); //清发送完成标志,Transmission Complete flag
} 注意,需要包含头文件stdio.h,否则FILE类型未定义。
勾选了Use MicroLib选项,重定向fputc()函数后,我们就可以在工程代码中使用printf()函数了。
三、实例
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "semphr.h"
#include "timers.h"
//------------------------------------------------------------------------------------
#include <stdio.h>
#include <stdlib.h>
void vTaskDT_Poll(void *pvParameters)
{
while(1)
{
printf("vTaskDT_Poll run...\r\n");
GPIO_LED4_ON();
vTaskDelay(250);
GPIO_LED4_OFF();
vTaskDelay(250);
}
}
int main(void)
{
__set_PRIMASK(1);
GPIO_Configuration();
NVIC_Configuration();
print_init(); //重定向print()函数到USART3串口
//创建任务通信机制
AppObjCreate();
//创建任务
AppTaskCreate();
//启动调度器
vTaskStartScheduler();
while (1);
}