本代码使用MATLAB实现扩展卡尔曼滤波(EKF)和粒子滤波(PF)在状态估计中的对比分析。
总述
代码主要功能包括:
参数设置:初始化仿真参数,如粒子数量、时间序列、状态转移与观测噪声的协方差矩阵。
真实状态与观测值生成:通过定义状态转移方程,生成系统的真实状态和带噪声的观测值。
粒子滤波初始化:随机生成粒子并计算初始权重,为粒子滤波的后续步骤做准备。
扩展卡尔曼滤波:通过预测、更新步骤,利用测量数据不断修正状态估计。
粒子滤波实现:在每个时间步中,将粒子进行预测、加权、归一化和重采样,得到状态估计。
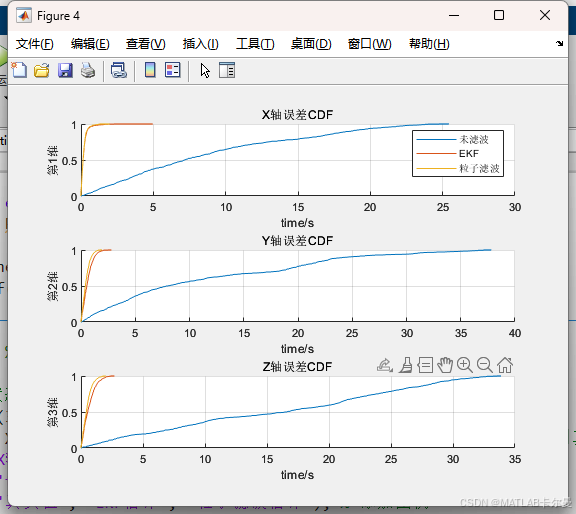
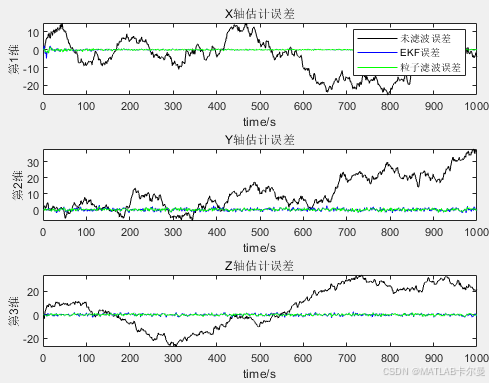
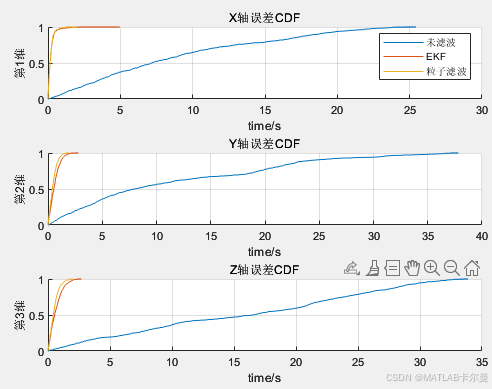
绘图:绘制真实状态与估计状态的对比图、估计误差图及误差的CDF(累积分布函数)图,方便分析不同滤波方法的性能。
误差统计特性输出:在命令行输出未滤波、EKF和PF的最大误差值,提供对比依据。
部分源代码
如下:
% EKF+PF效果对比
% author:Evand
% date: 2024-1-10
% Ver2
% 2024-09-23/Ver3:添加逐行注释
clear; %清空工作区
clc; %清空命令行
close all; %关闭所有窗口(主窗口除外)
rng(0); %固定随机种子,让每次运行得到的结果相同
%% 参数设置
N = 100; %粒子总数(此值仅影响粒子滤波部分)
t = 1:1:1000; %仿真时间设置
Q = 1*diag([1,1,1]); %设置状态转移协方差矩阵
R = 1*diag([1,1,1]); %设置观测噪声协方差矩阵
w_pf=sqrt(Q)*randn(size(Q,1),length(t)); %生成状态转移噪声
v_pf=sqrt(R)*randn(size(R,1),length(t)); %生成观测噪声
P0 = 1*eye(3); %生成状态协方差矩阵
如上,几乎每一行代码都有中文注释,方便理解。
完整代码下载链接:https://download.csdn.net/download/callmeup/89788619
运行结果
-
三轴状态量对比:
-
三轴误差对比:
-
三轴误差的CDF图像对比:
-
输出误差
扩展性
在扩展卡尔曼滤波(Extended Kalman Filter, E K F EKF EKF)和粒子滤波(Particle Filter, P F PF PF)这两种常用的非线性滤波方法之间,有以下几点对比和扩展考虑:
-
线性假设 vs 非线性处理:
EKF基于线性化处理,适合系统模型接近线性的场景,但在高度非线性的情况下可能会失效,因为局部线性近似可能导致较大误差。
PF则天然适用于非线性系统,因为它通过模拟大量的随机采样点(粒子)来追踪不确定性,而非依赖于系统方程的线性性质。 -
计算效率:
EKF由于只需要求解一次矩阵运算,相比PF而言,其计算量较小,尤其是在高维系统中。
粒子滤波的计算复杂度随着粒子数目的增加而增加,当系统状态维度很高或观测噪声大时,可能需要大量粒子才能保持较好的估计精度。 -
鲁棒性和适应性:
PF对初始条件敏感度较低,且能较好地处理缺失数据和异常值,适合不确定性较高的环境。
EKF在某些极端条件下(如矩阵奇异),可能会导致滤波器不稳定。 -
扩展性:
EKF通常更容易与已有的数学工具结合,比如系统动力学建模等。
PF的扩展性相对较弱,但随着算法优化(如Resampling、Bootstrap Sampling等)和并行计算的发展,现代PF技术也有了改进。
为了进一步扩展这两种滤波器,可以考虑:
- 融合信息: 结合其他滤波方法(如无迹卡尔曼滤波Unscented Kalman Filter, UKF),增强非线性处理能力。
- 自适应采样: 对于粒子滤波,研究更高效的采样策略和重采样方法,降低计算成本。
- 在线学习: 在EKF中引入机器学习元素,提高对未知动态模型的适应能力。
- 硬件加速: 为大数据量的PF设计专用硬件或者GPU加速算法。
- 深度学习辅助: 将滤波结果作为神经网络训练的数据输入,提升整体系统的性能。
如有需求,可通过问文末卡片联系作者