简介:介绍 TM-16多线激光雷达 在8210A载板,TX2核心模块环境(Ubuntu18.04)下测试ROS驱动,打开使用RVIZ 查看点云数据,本文的前提条件是你的TX2里已经安装了ROS版本:Melodic。
大家好,我是虎哥,最近有感于国内激光雷达真是越做越好,所以尝试导入天眸的TM-16雷达,这是一款机械式16线激光雷达,国内速腾、万集、镭神都有做,但是天眸这一款依然有很好的性价比,所以拿到货第一时间亲自做做接入适配测试,总结一下自己的简单测试经验,分享给大家。

TM16线机械式激光雷达,内部16组激光收发对可进行360°旋转,形成3D点云图。大探测距离是150米,垂直可视范围是30°,水平可视范围为360°,垂直角度分辨率为2°。是全球首款能在酷寒地区工作的16线激光雷达,-40C°可瞬间启动,无需辅助加热。由于性能优异和超高性价比,广泛应用于无人配送机器人,无人巡检机器人,清扫机器人,无人小巴等多种低速无人车等领域。
EdgeBox-8120AI-TX2控制器是基于nvidia Jeston TX2核心模块,最大功耗不超过10W,具备最多6个CPU核心,单核主频最高可以2.0Ghz。具有丰富的功能接口,可满足不同行业的产品定制需求。

提供4路独立的千兆网口,设计接口:RS232/RS485/RS422多功能串口, USB3.0X2,HDMI OUT、WIFI、CAN 接口。整体尺寸153mmX102mm,为小体积集成提供便利。
目录
一、WLR-720机械式16 线激光雷达介绍
1.1 主要特点
-
波长:905nm
-
线数:16线(相同外形尺寸,4线 、8线可定制)
-
测距方式:脉冲式
-
激光器等级:Class 1人眼安全
-
玻璃探测能力:可探测透明玻璃(可选配)
-
回波模式:单回波和双回波(模式可选)
-
点频:320,000(单回波)和640,000(双回波)
-
小探测距离:0.2m
-
大探测距离:150m (at 30% reflectivity)
-
旋转频率:5Hz/10Hz/20Hz
-
水平可视范围:360°
-
垂直可视范围:30°( -15° ~+15° )
-
水平角度分辨率:0.09°( 5Hz) 、0.18°( 10Hz) 、0.36°( 20Hz)
-
垂直角度分辨率:2°
-
测距精度:±2cm(大于0.5m); ±5cm (0.2m~0.5m)
-
数据传输方式:UDP/IP Ethernet(100Mbps)
-
工作电压:+12V~+36V
-
功耗:典型值8W
-
工作温度:-40°C~+85°C
-
保护等级:IP67
-
尺寸(HD):≤( 84mmΦ102mm)
-
重量:重量≤860g(机载机型≤650g)
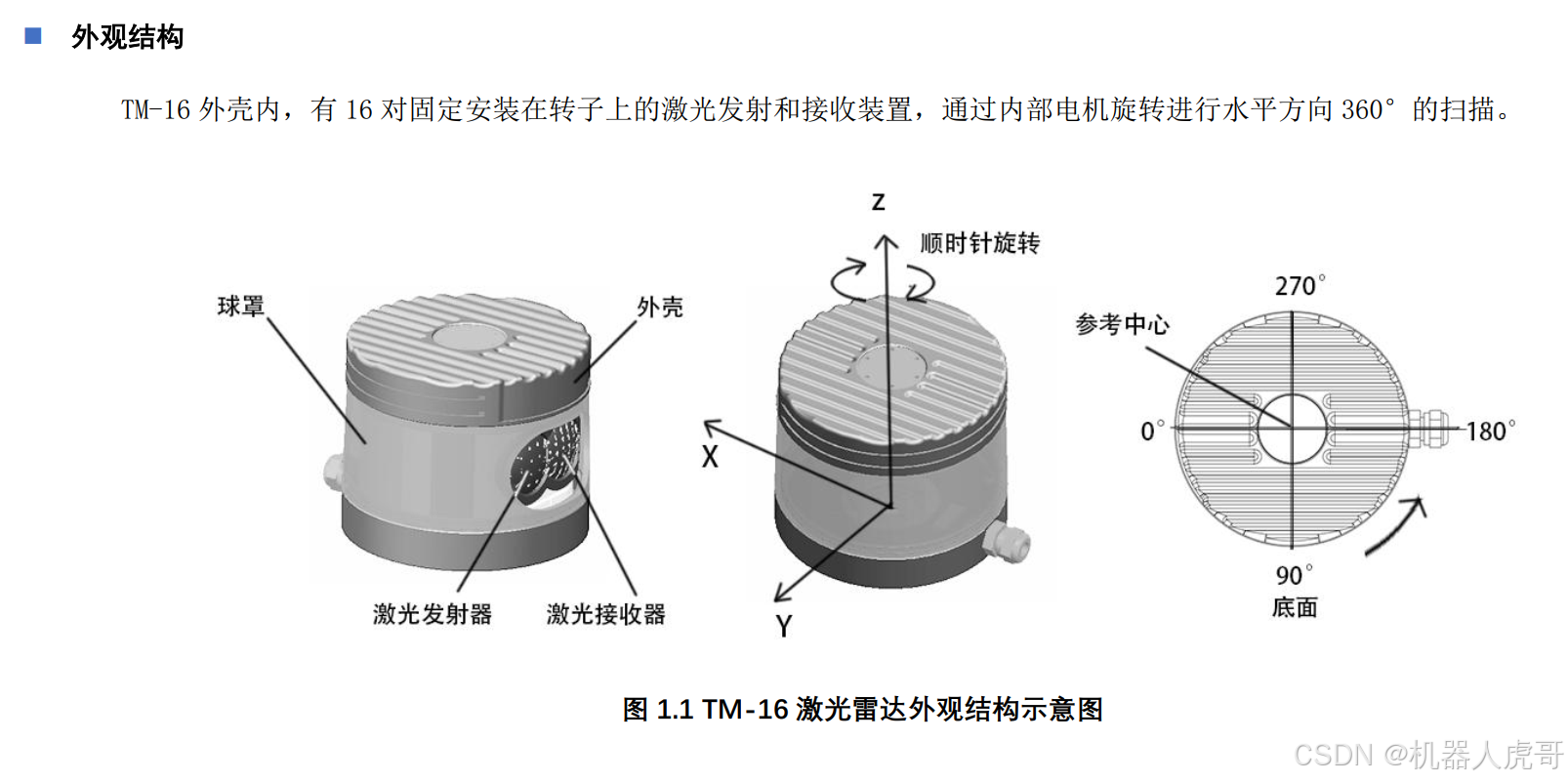
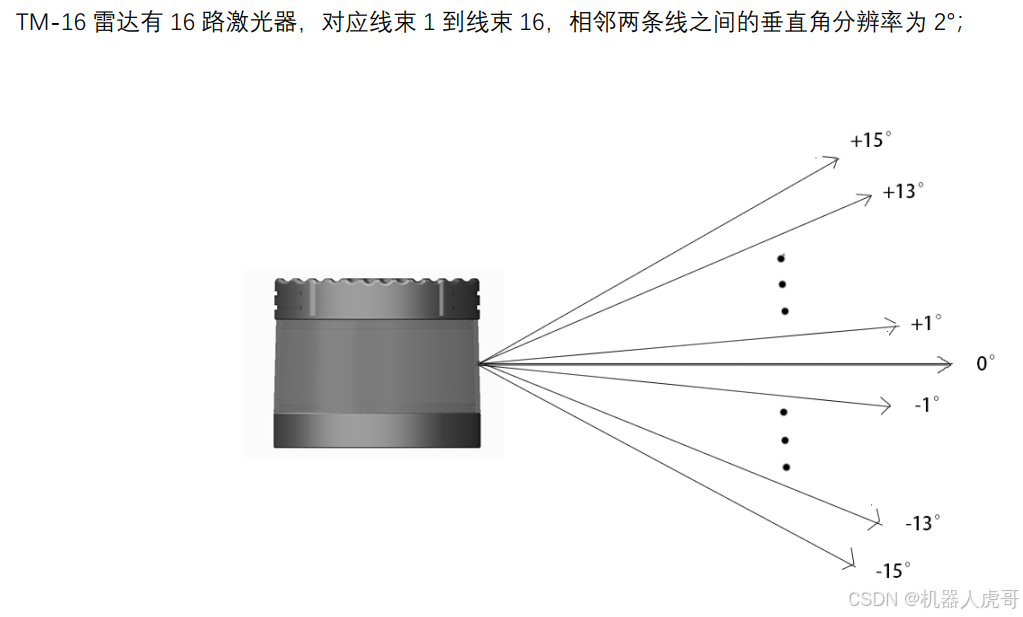
1.2 线束分布数据
TM-16的垂直方位角为-15°~+15°,1 到 16 发光通道在垂直方向间隔 2°从上到下均匀分布,16 路发光通道与垂直角度映射关系如图 1.1 所示。
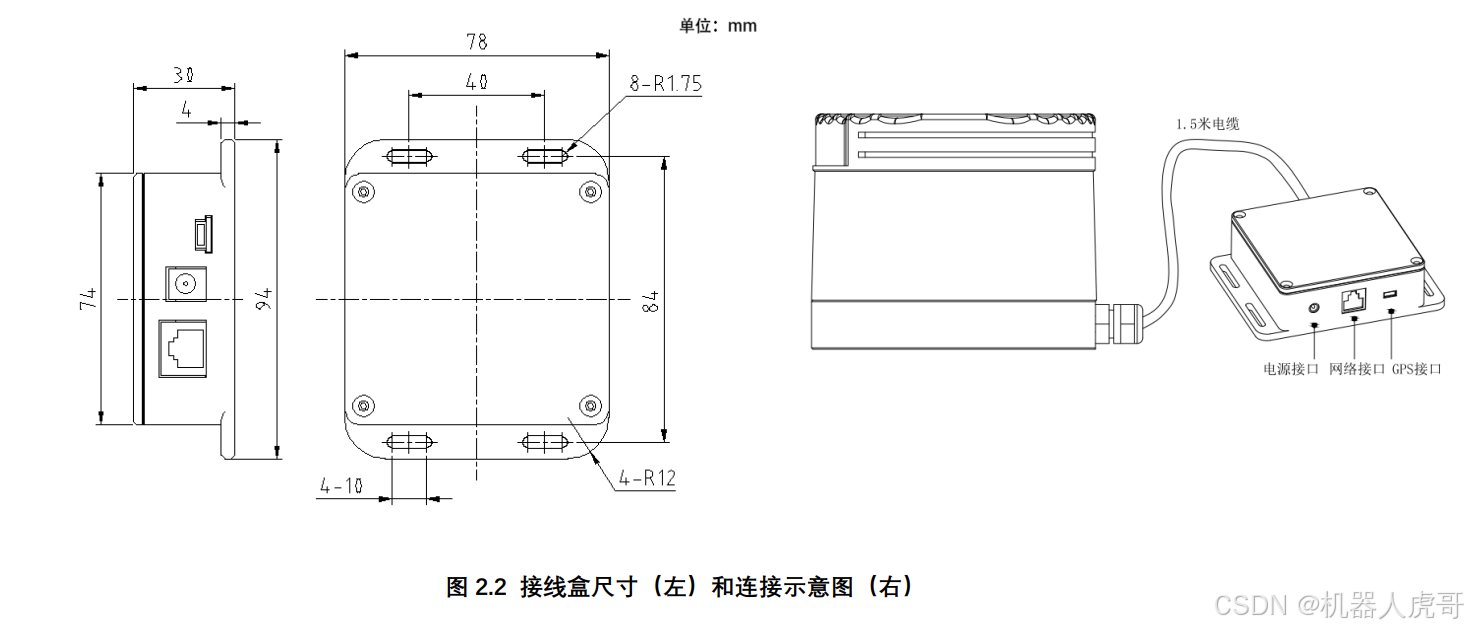
1.3安装尺寸
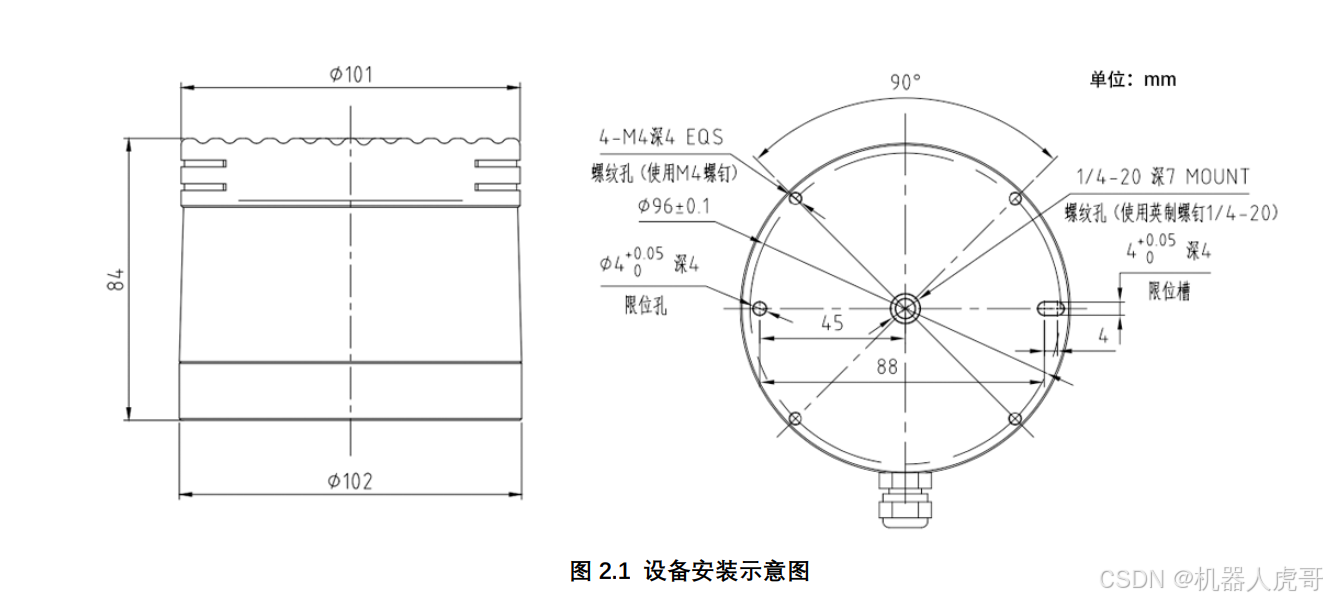
在φ96 的分度圆上打 4 个通孔装 M4 的螺钉, 为确保雷达的零位, 可配合使用φ4 的限位孔和限位槽。或使用中心位置的 1/4-20 的英制螺纹孔(使用螺钉 1/4-20 的英制螺钉) , 配合使用φ4 的限位孔和限位槽。
1.4 电源适配盒
个人一直觉得这个盒子配的有点鸡肋,但是在刚入手测试的时候确实可以方便不少,而且有很多家也都是这么做的,估计大家应该也是有互相兼容的考虑吧。

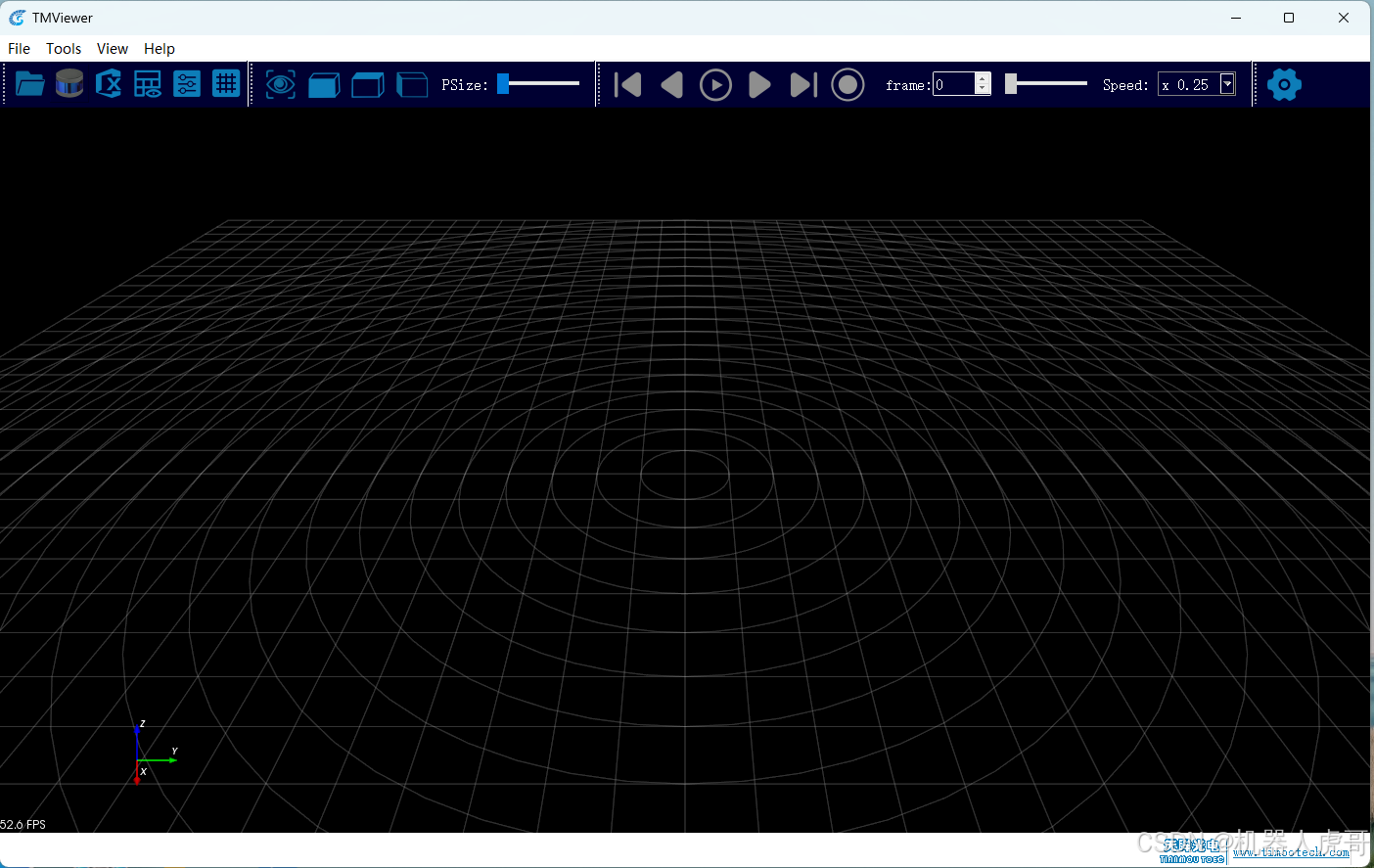
二、WIN端VanJeeView测试配置
TMViewer 提供将 TM-16输出数据进行可视化的功能,TMViewer是天眸多线激光雷达WIN端显示软件。 这个软件目前有点硬件要求:本软件目前只能运行在Windows x64 系统操作平台下。 对安装软件的计算机配置要求为: CPU:Intel(R) Core(TM) i5 以上, 显卡:NVDIA GeForce GTX750 以上效果最好, 否则可能影响软件的显示效果。
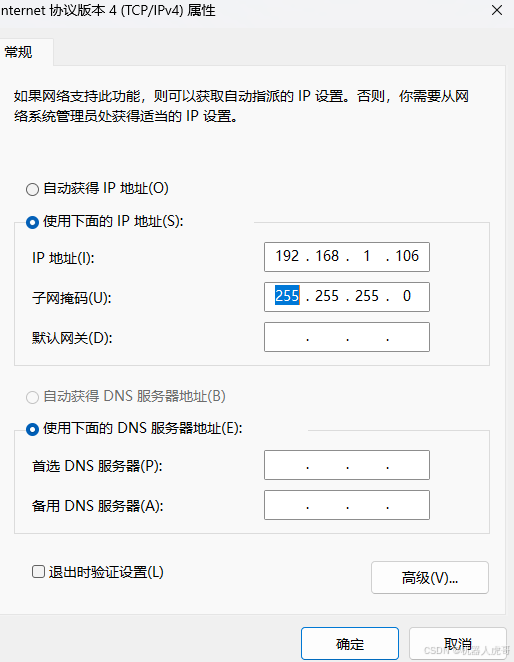
2.1 配置电脑IP信息
雷达默认出厂IP信息,用户如需在电脑上接收TM-16传输的数据, 请将电脑IP地址设置为192.168.1.106, 将子网掩码设置为255.255.255.0。用户可以通过武汉天眸光电的点云可视化软件TMViewer来快速查看或录制点云数据 。官方手册让默认需要自己电脑IP配置成上述的要求。
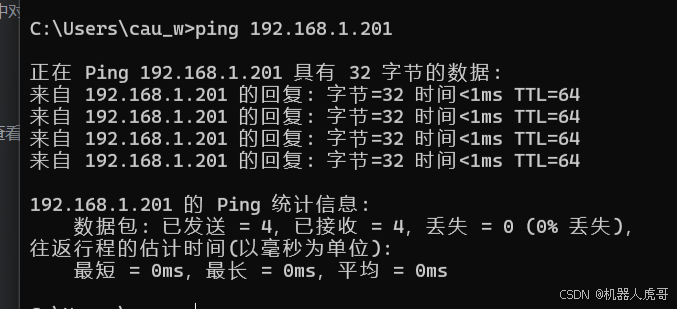
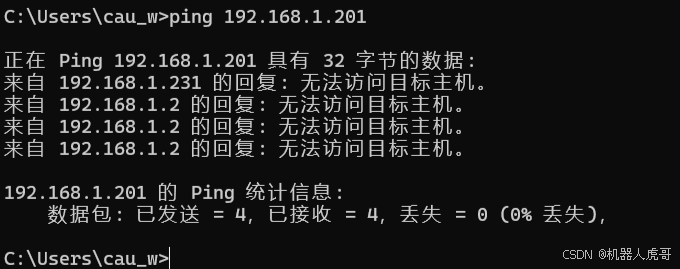
若不知设备网络配置信息, 请在雷达上电后连接设备使用wireshark 抓取设备ARP 包进行分析,
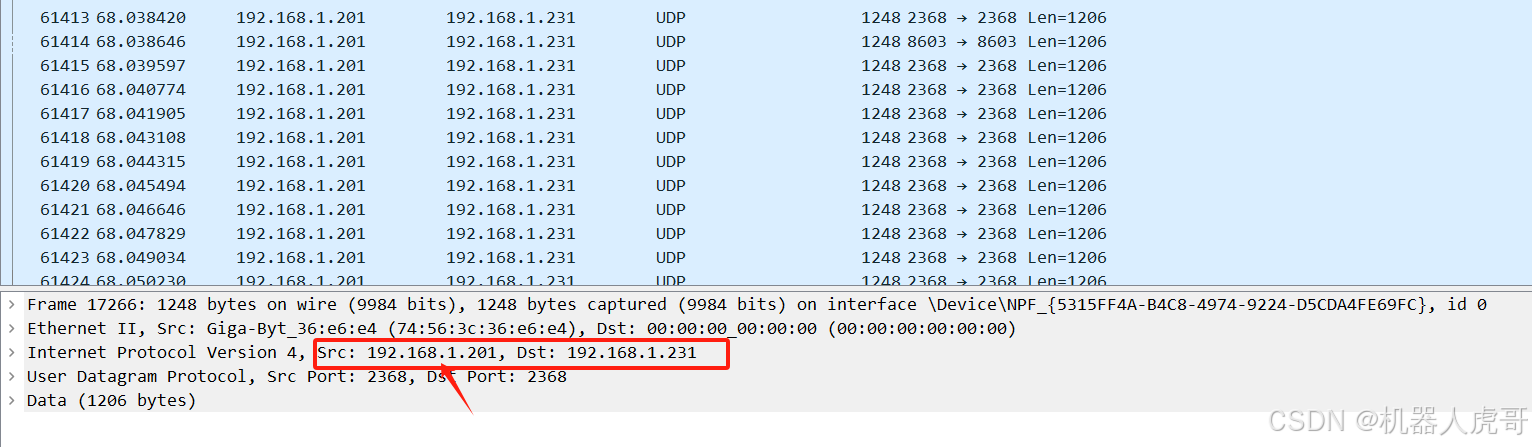
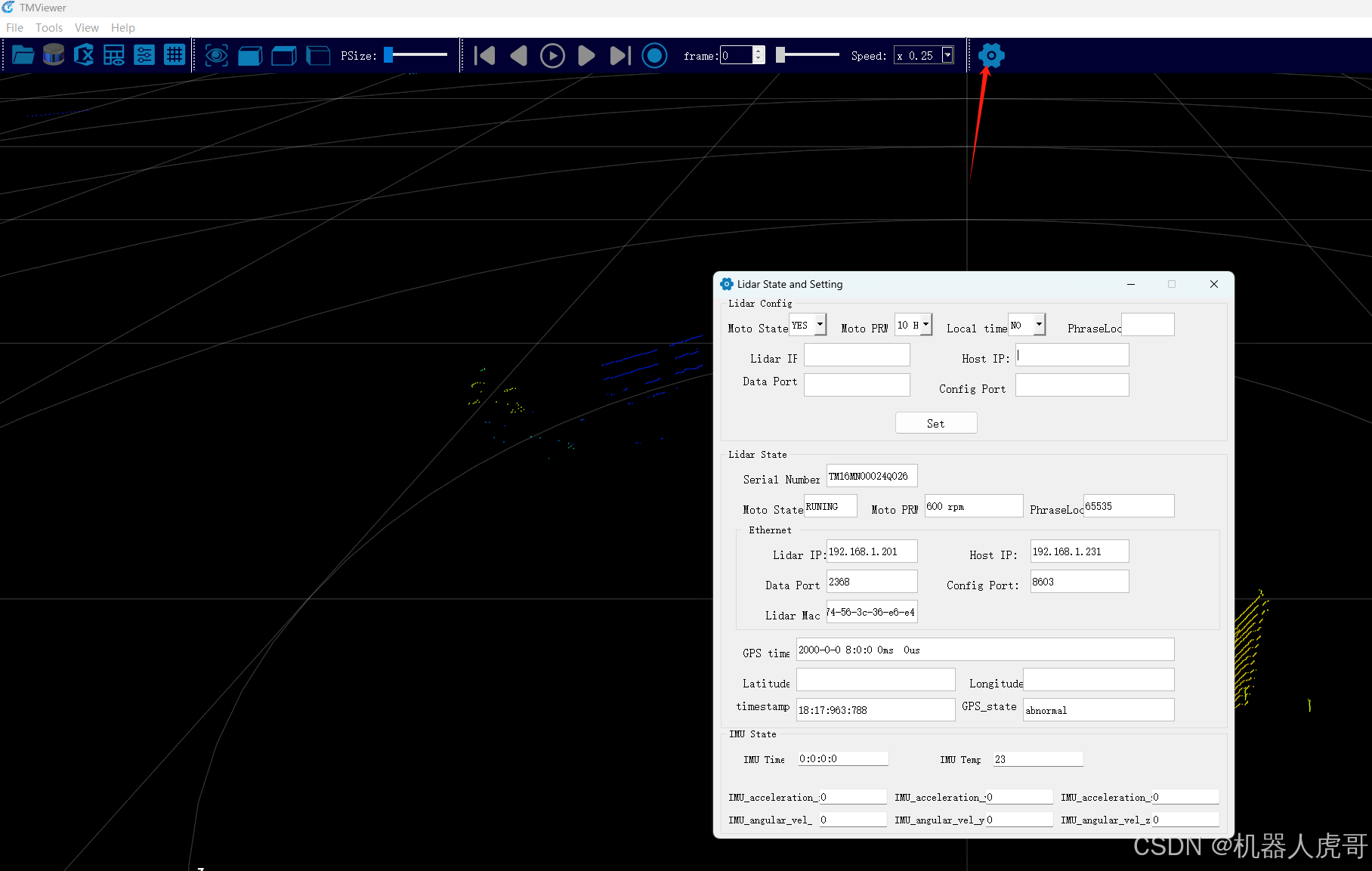
从抓包工具上可以分析得到,我手中这台雷达的IP信息是:192.168.1.201,设置的目的IP是:192.168.1.231,所以我们需要将和雷达链接的IP修改为192.168.1.231。
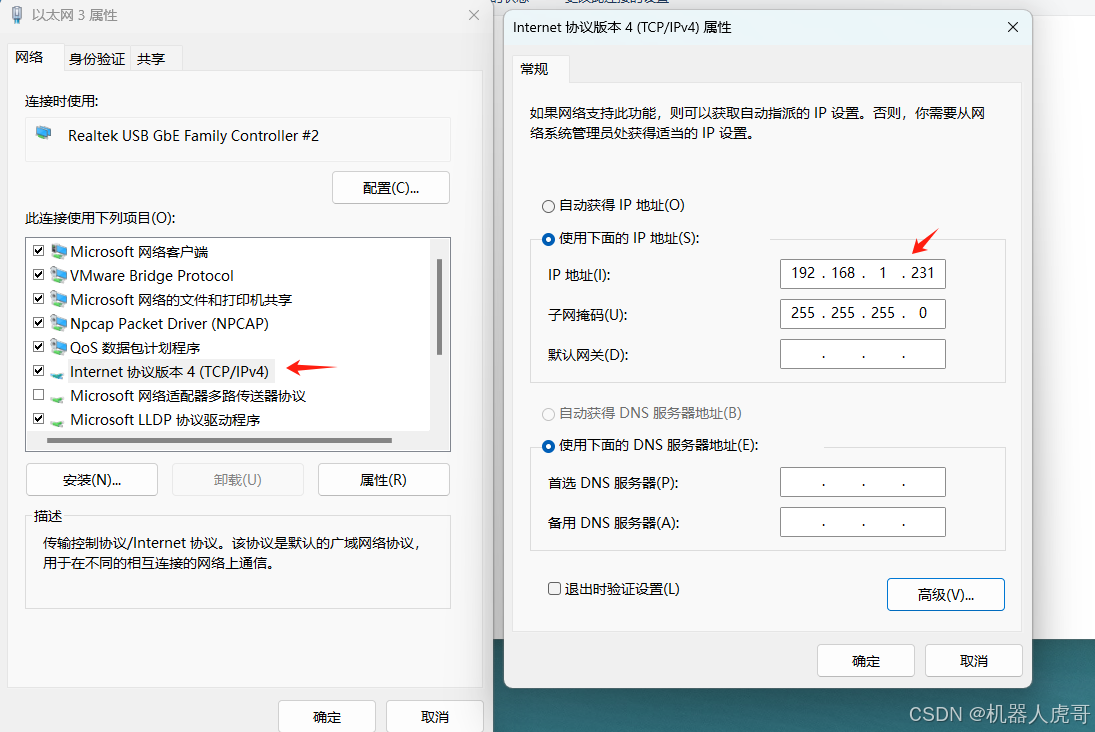
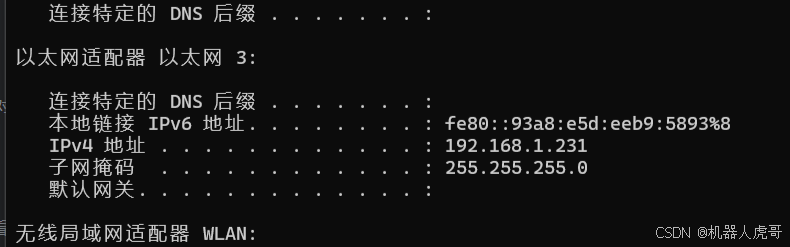
保持和雷达同一个网段,最好关闭防火墙。记得将雷达的网口,接入你电脑的网口。
2.2 打开软件

安装后会有这个图标,打开这个软件。
2.3 链接雷达
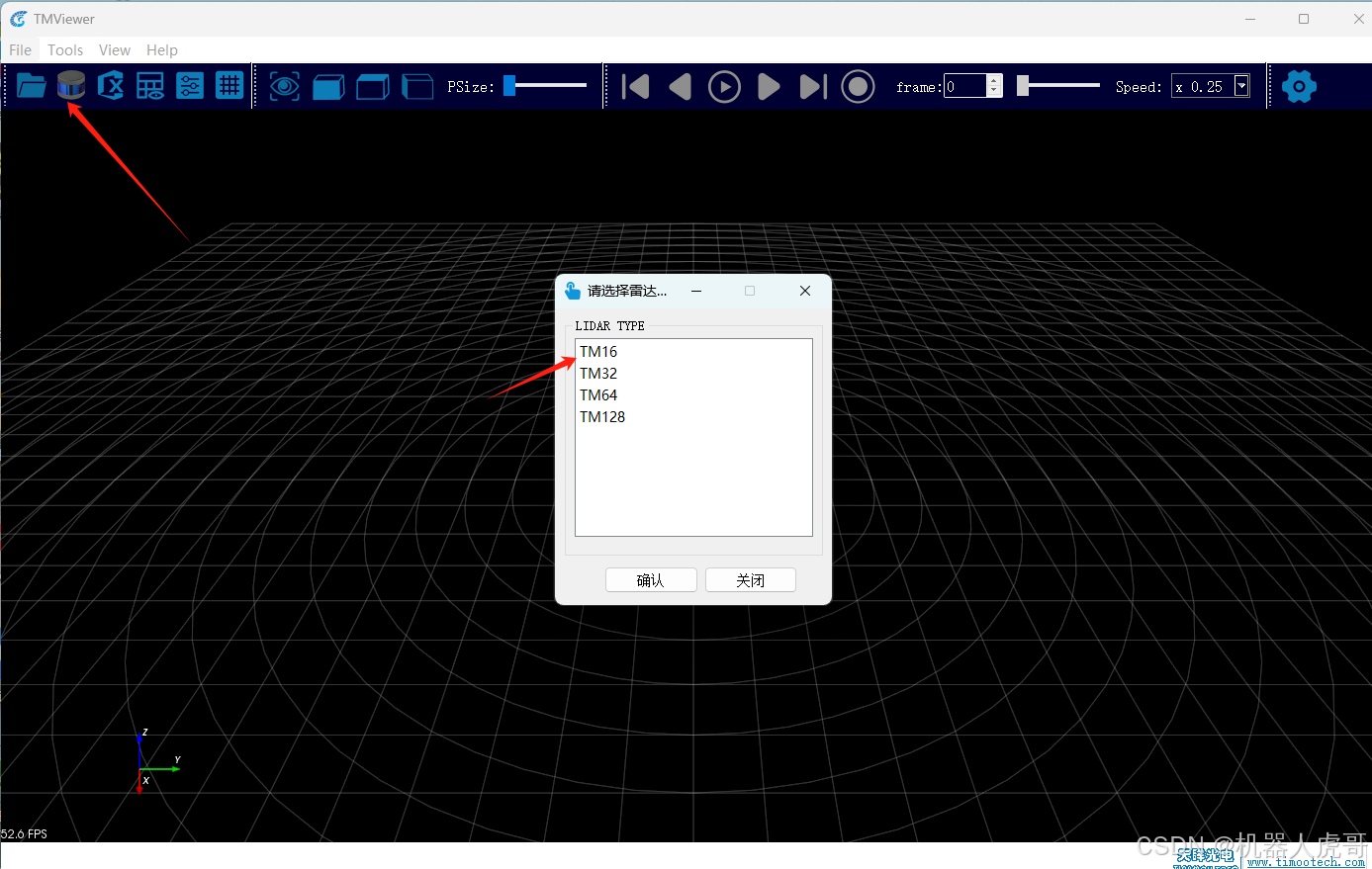
确认后,如果配置信息正取,就可以看到点云了。

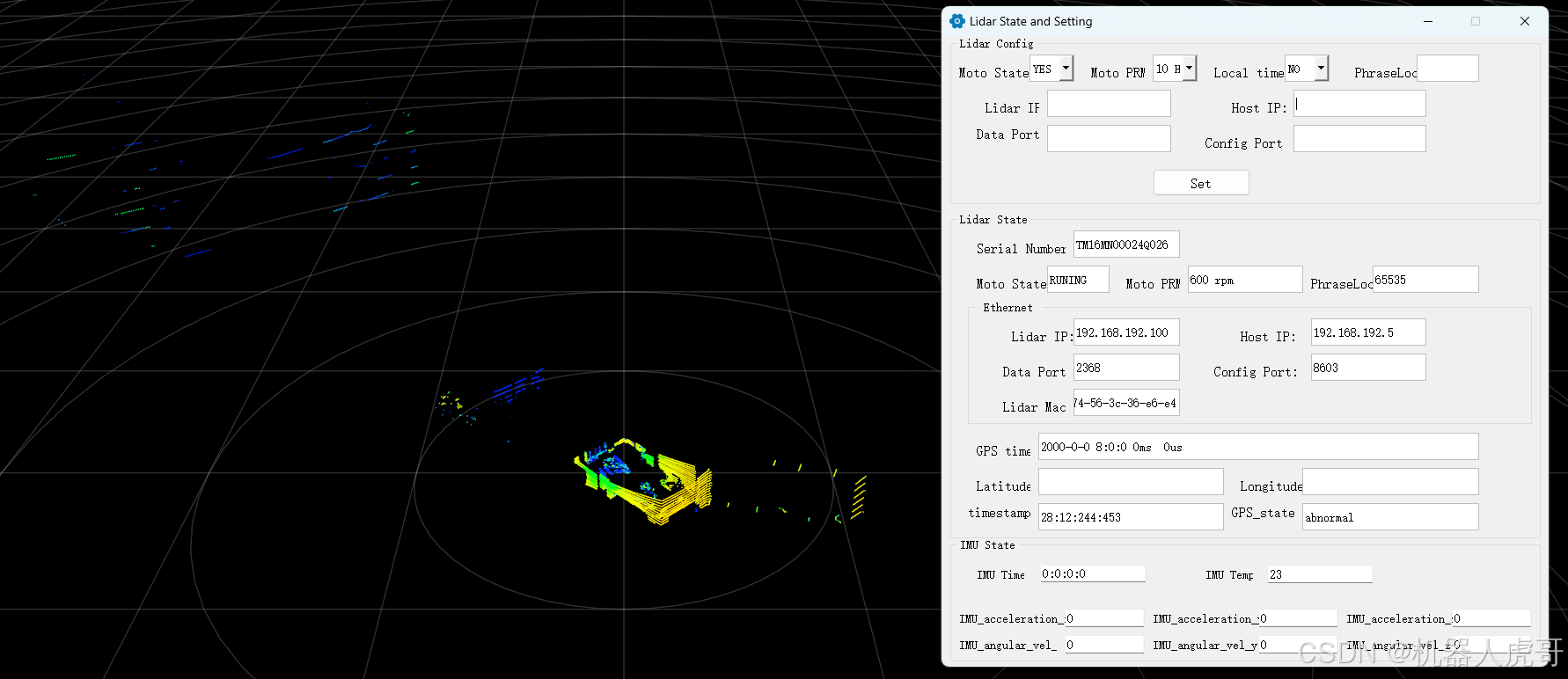
2.4根据需要修改配置,一般改最多的就是IP信息
我们再WIN端链接雷达,一是为了简单判断和查看雷达的好坏,其次就是为了修改IP信息,让我们的系统可以兼容这个位置,避免每此导入雷达都同步要改很多地方的配置信息。
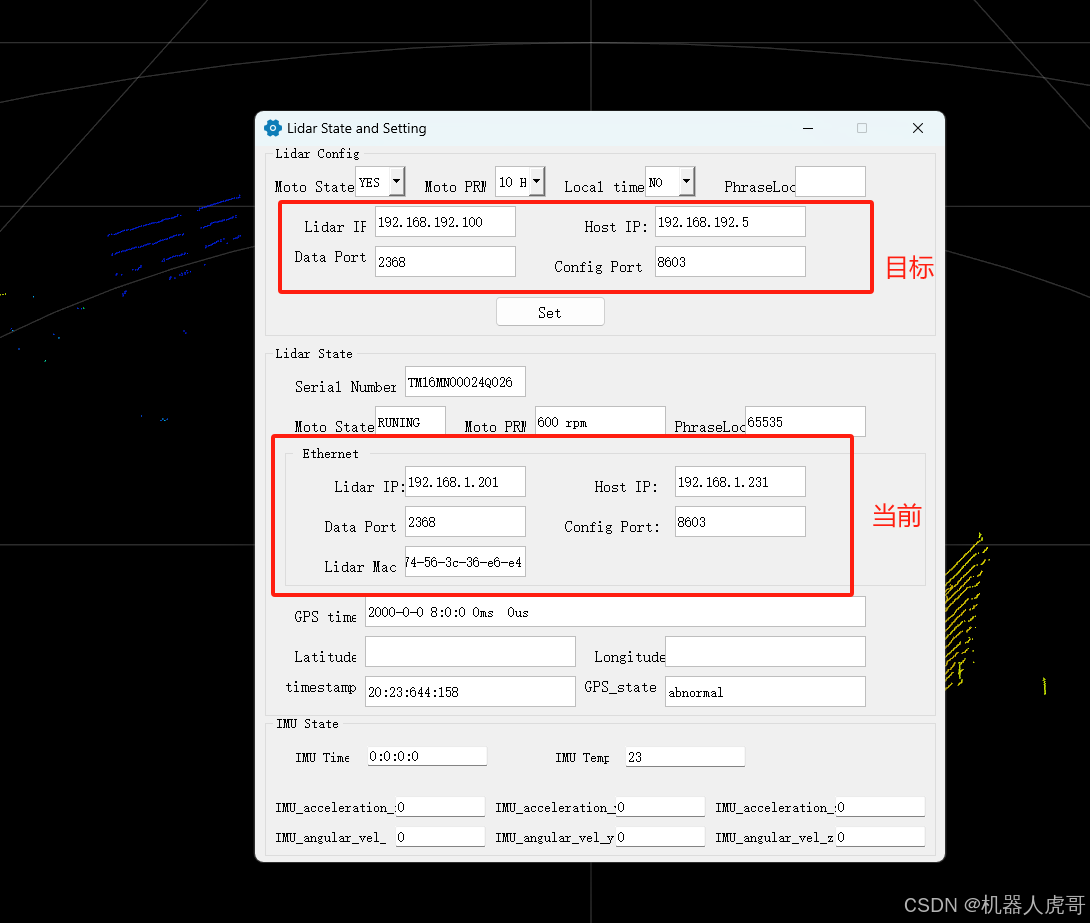
我们按照要求,修改IP,端口我们保持一致即可。

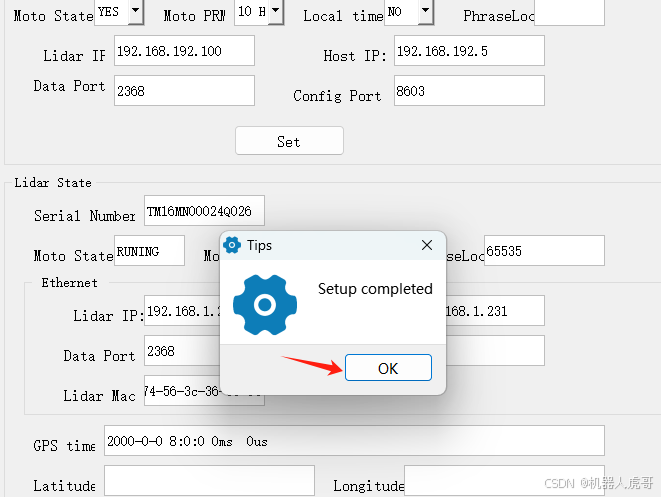
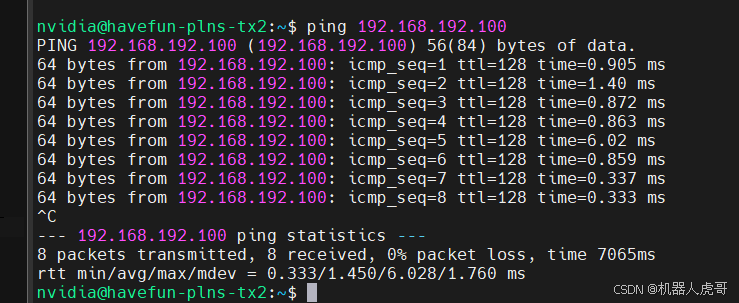
此时,雷达就会重启,使用新的IP,旧的IP就无法再ping通。
2.5修改后WIN端IP测试验证
修改自己的电脑IP为,目的地址IP
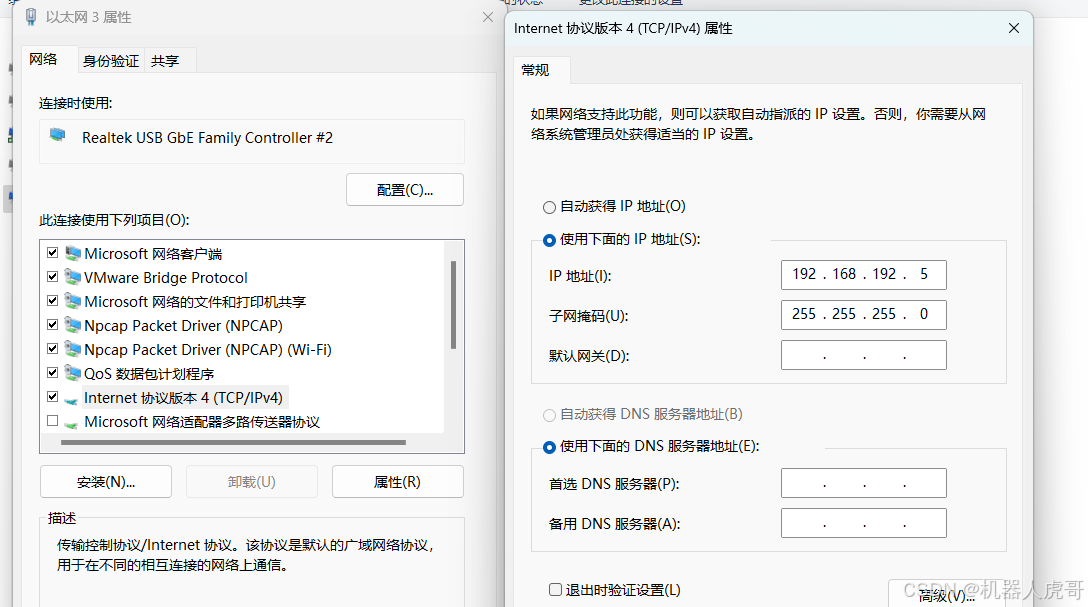
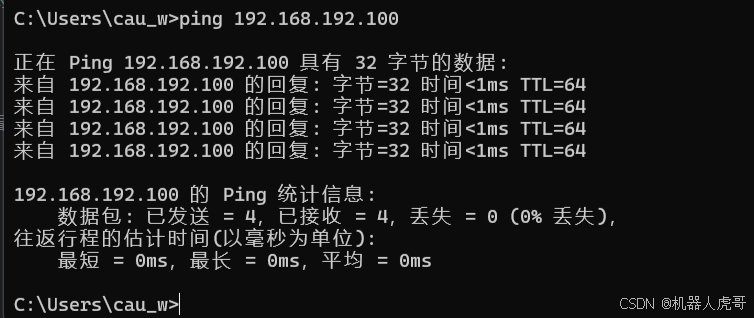
雷达不用重新上电,IP就生效了。重新打开软件。
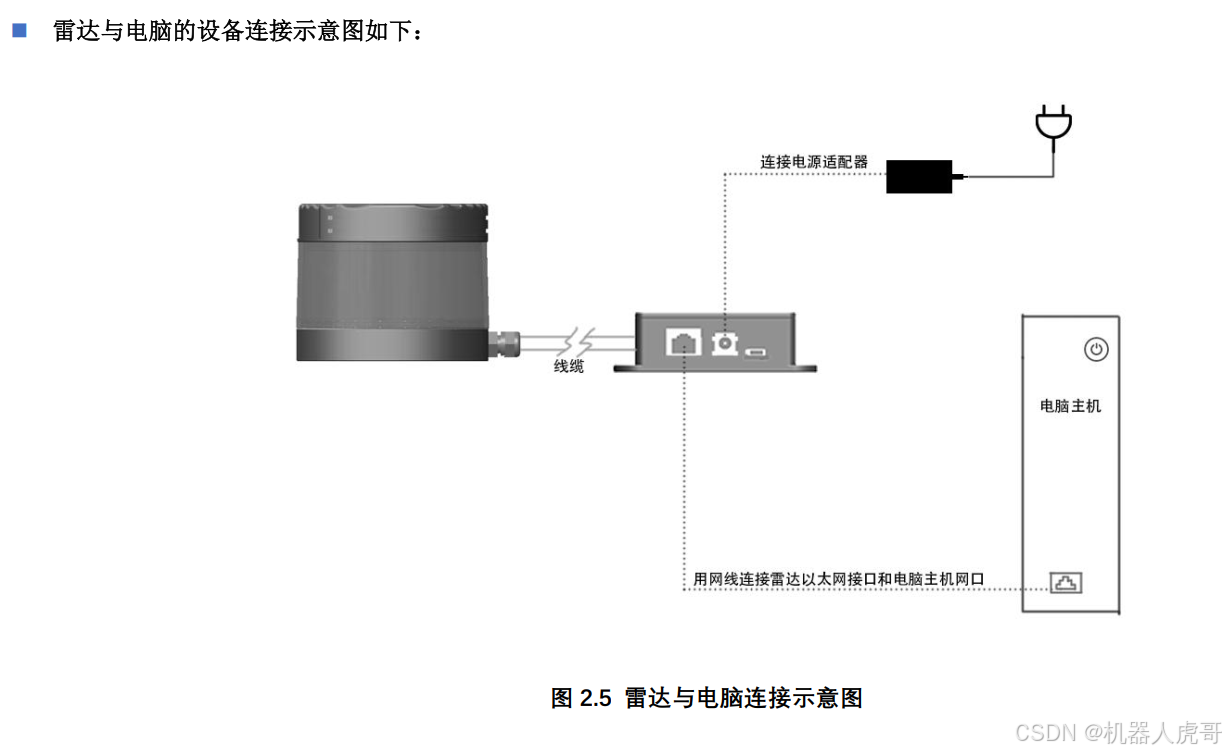
三、ROS下接入测试
上面WIN端,我们修改了IP信息,这里将雷达网口和测试主板链接到一起。ROS下的驱动官网既可以下载到。
3.1 将板子IP修改到和雷达要求的目的IP
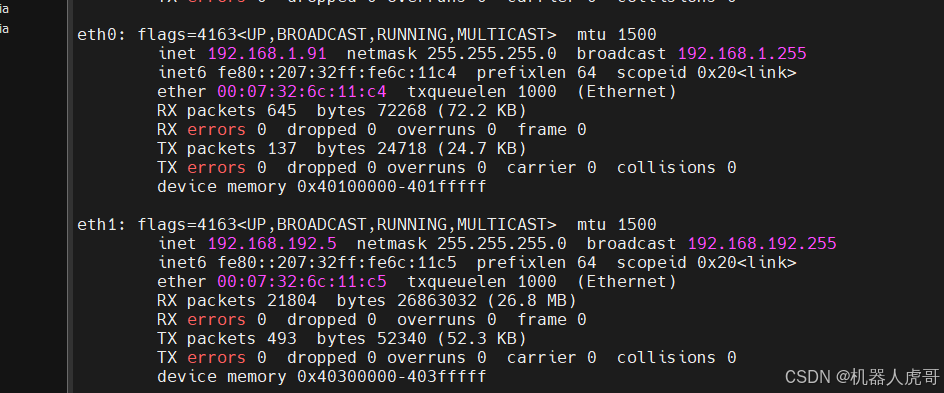
3.1 建立工作空间
mkdir -p ~/SensorWS/TM16_ws/src
cd ~/SensorWS/TM16_ws/
catkin_make
source devel/setup.bash3.2 拷贝代码
#将官方提供的驱动代码包放置到这个目录解压
cd ~/SensorWS/TM16_ws/src
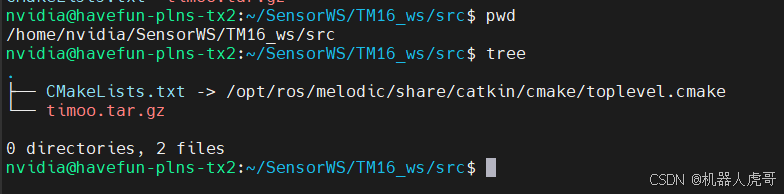
tar -zxvf timoo.tar.gz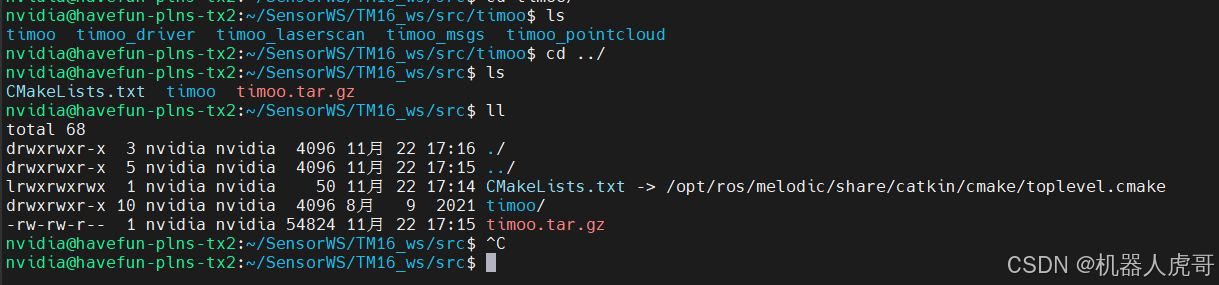
3.3 编译源码包
cd ~/SensorWS/TM16_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES=""
source devel/setup.bash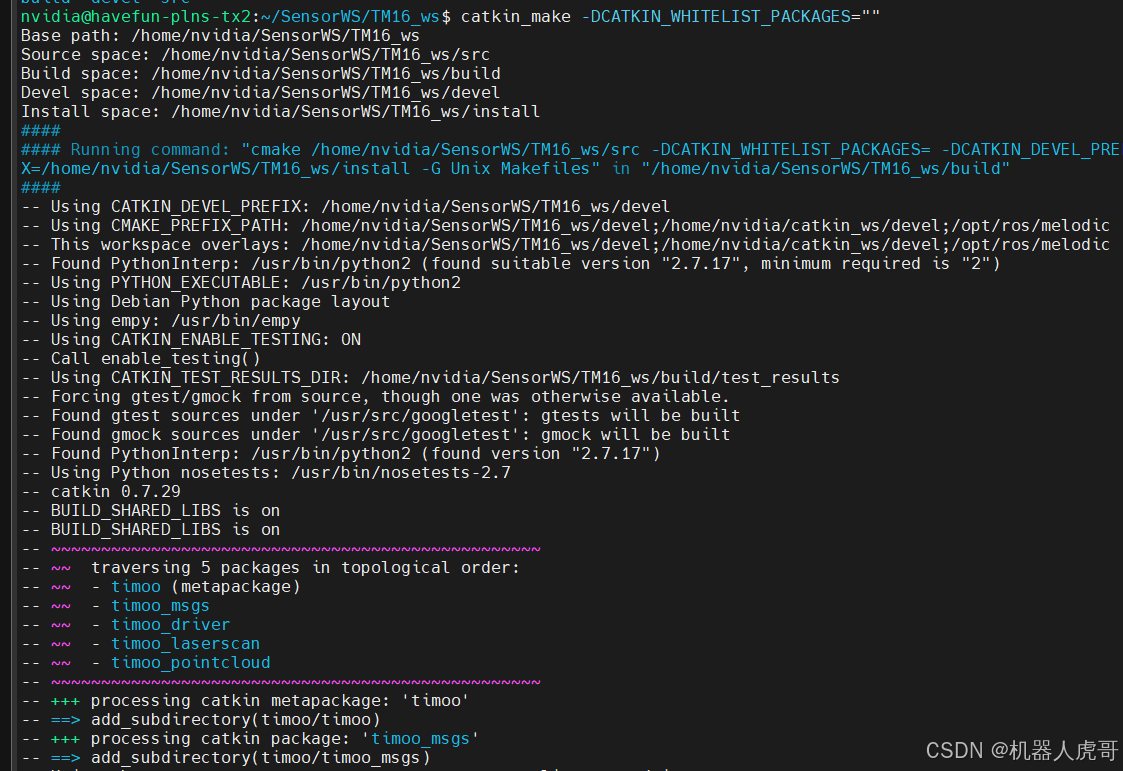
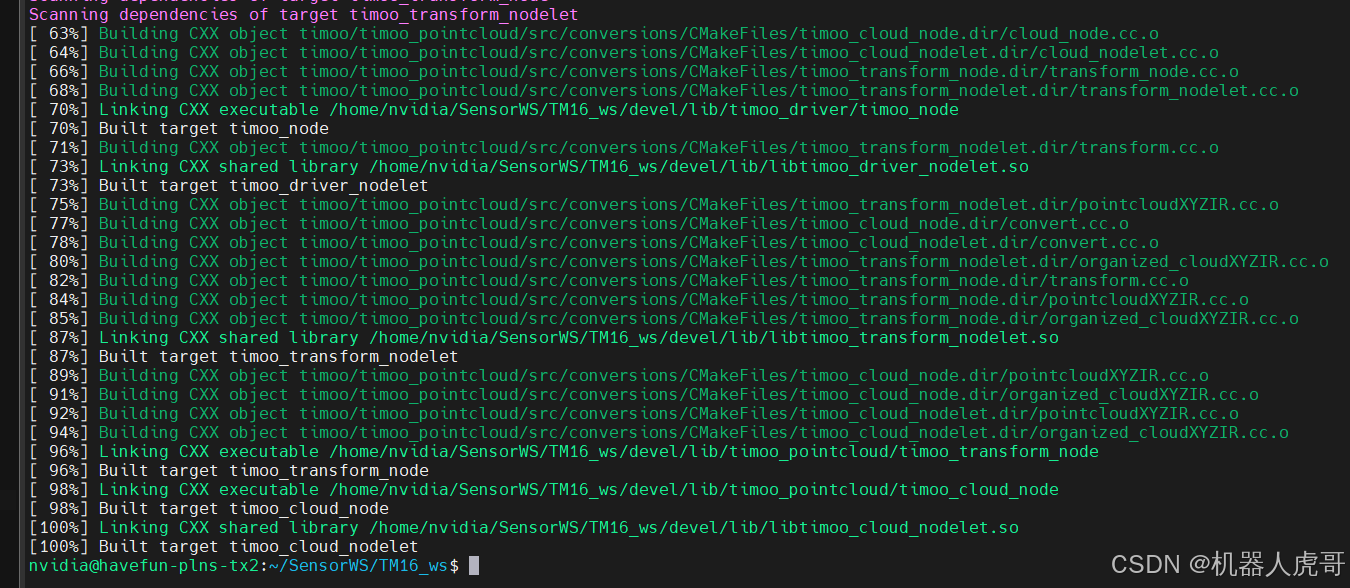
我们自己的环境由于经常适配雷达,所以支持包装的比较齐全,一把编译通过。
3.5 修改ROS 驱动启动脚本中对应的信息
刚才我们根据需要已经修改了IP,接下来我们测试,需要使用脚本启动,需要修改脚本的对应IP信息。
cd ~/SensorWS/TM16_ws/src/timoo/timoo_pointcloud/launch/TM16.launch
vim TM16.launch原始文件内容是:
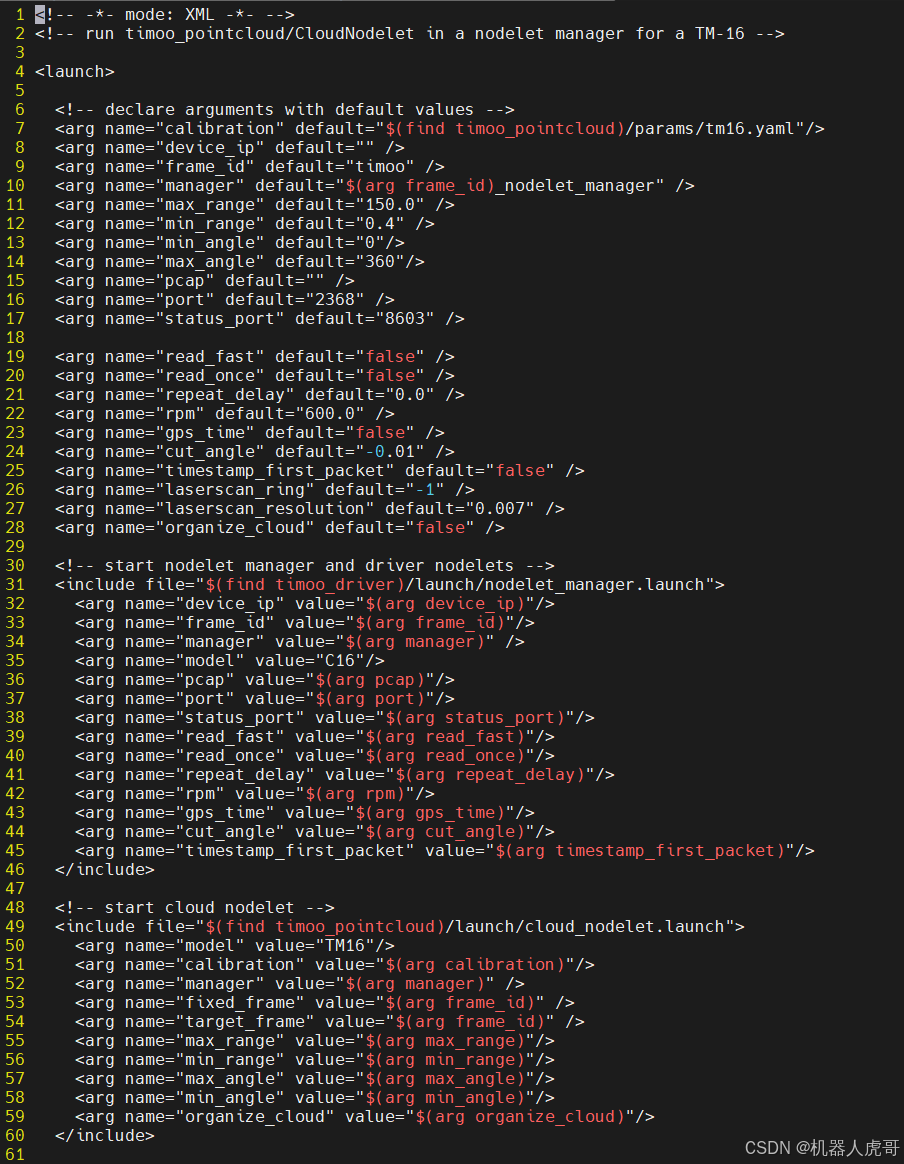
如果你有端口信息变动,就需要修改,由于我们使用了官方默认的端口号,所以不需要修改,另外就是主机IP和雷达IP,在配置雷达的时候改的和实际一致即可。
3.6 启动驱动
cd ~/SensorWS/TM16_ws
source devel/setup.bash
roslaunch timoo_pointcloud TM16.launch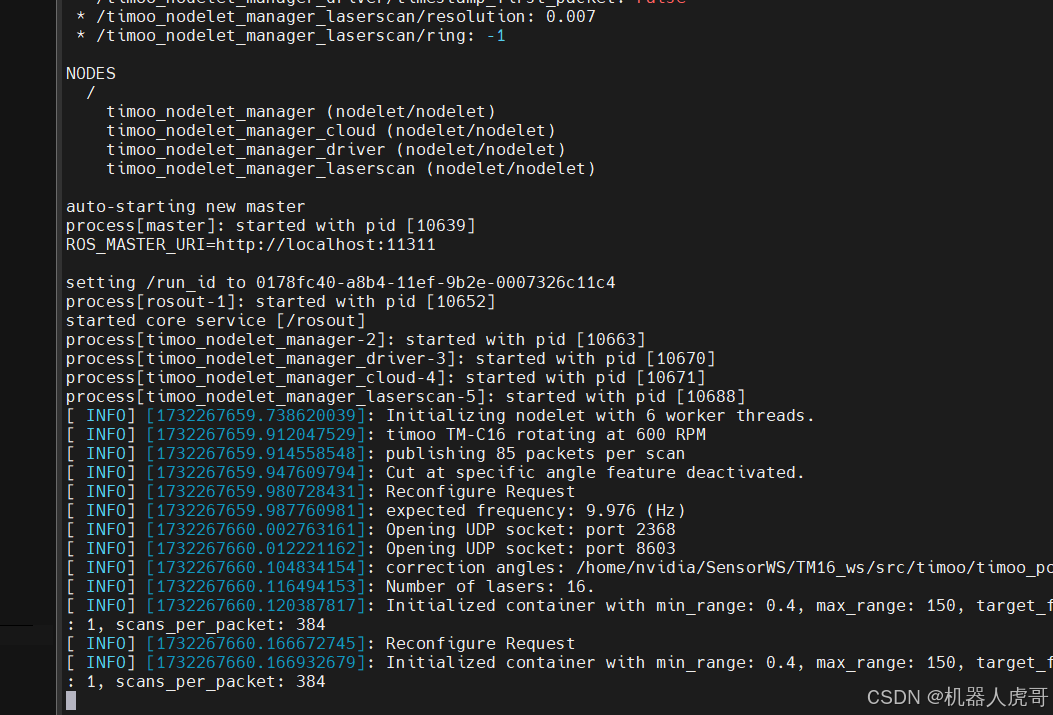
打开其实什么都不显示,需要RVIZ显示查看,需要再启动一个窗口,需要桌面系统支持最好。
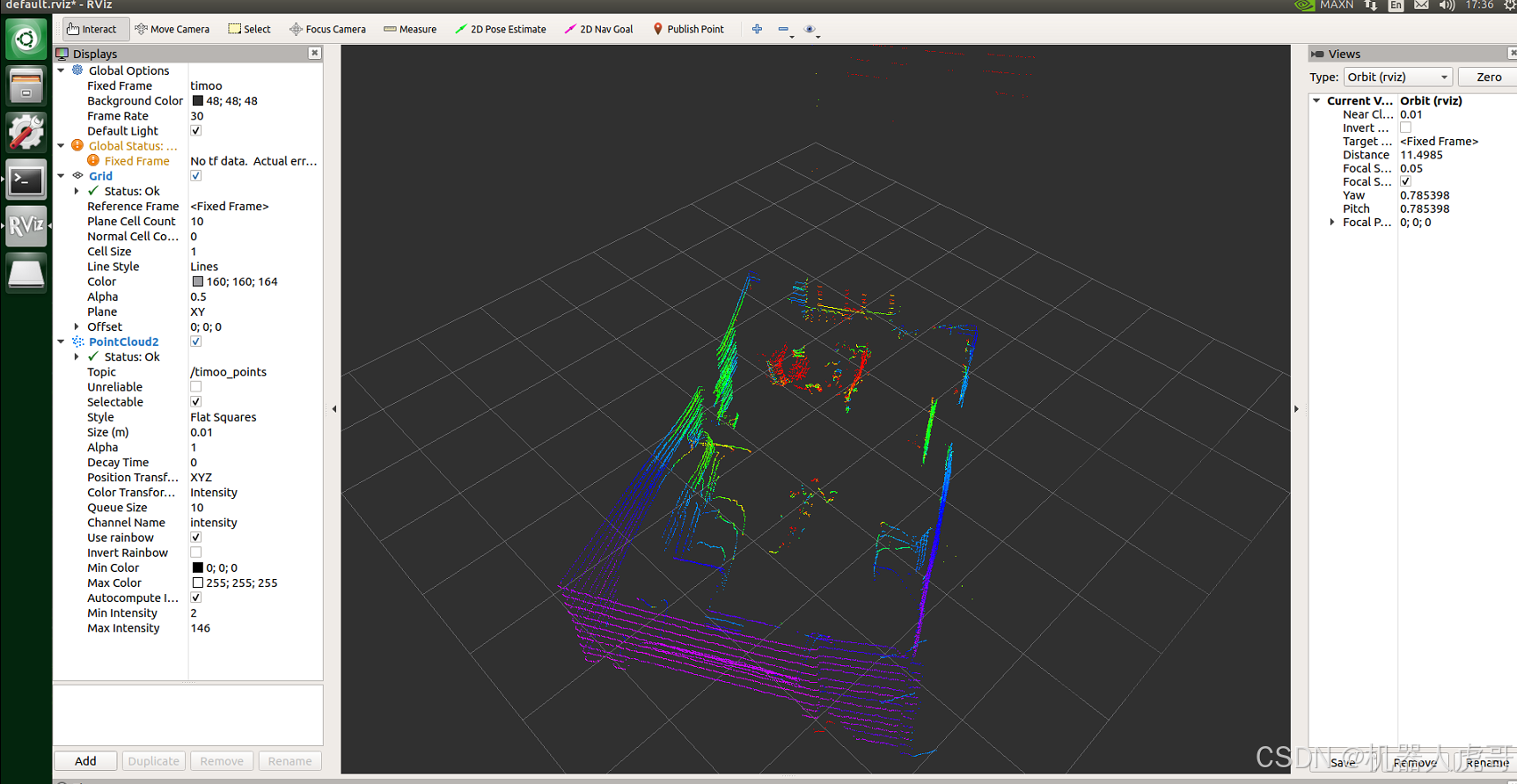
rviz rviz -f timoo选中“timoo_points”话题,即可查看点云。
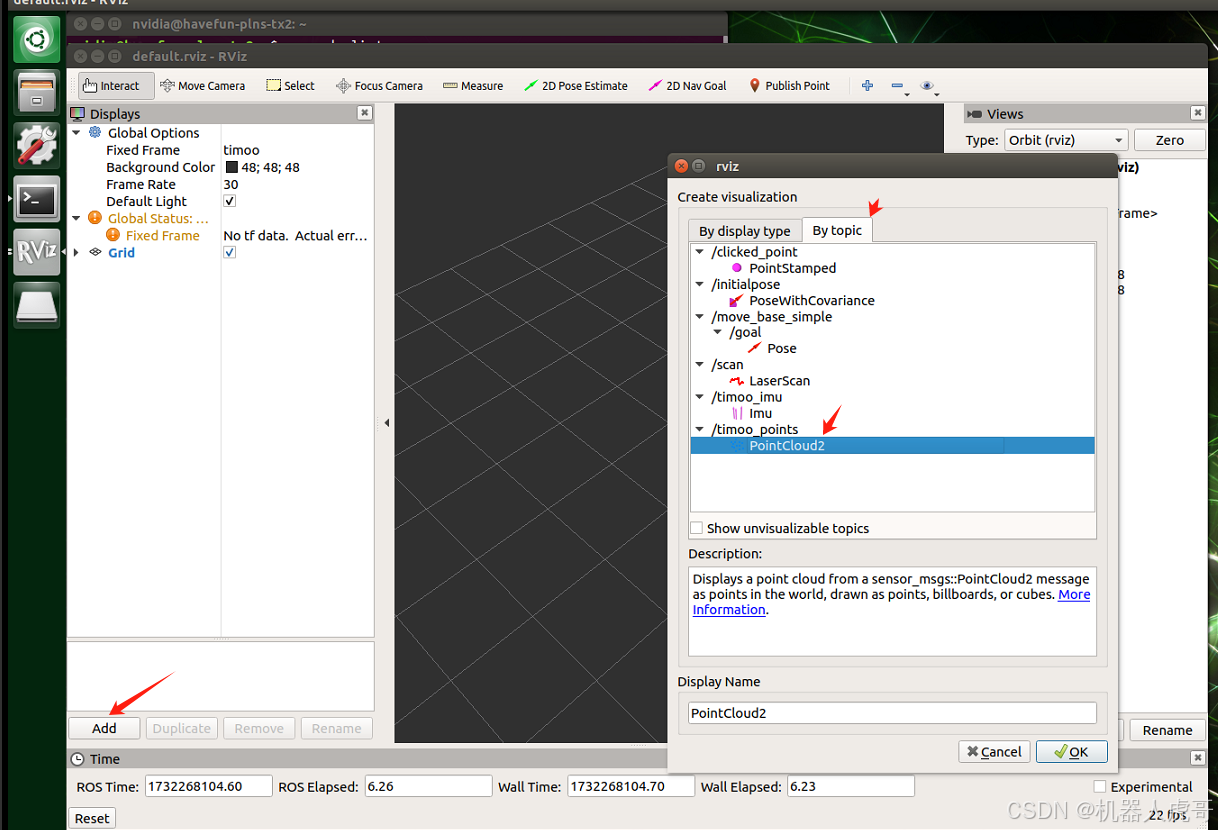
确定后就可以看到点云了。
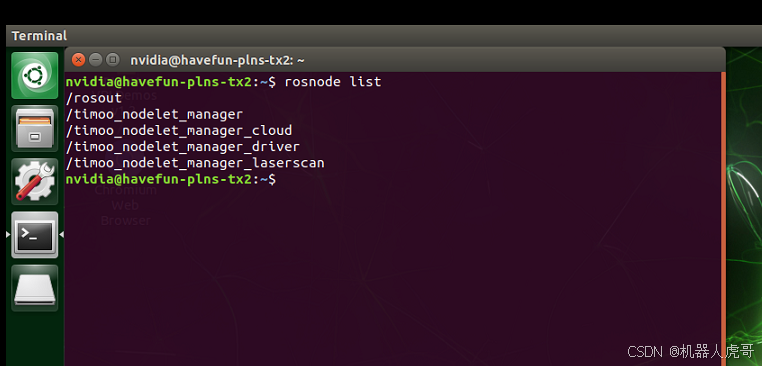
新启动一个终端,我们可以初步看看驱动的一些节点信息:
rosnode list
---------------------------------------------------------------
/rosout
/rviz_1732267836043275773
/timoo_nodelet_manager
/timoo_nodelet_manager_cloud
/timoo_nodelet_manager_driver
/timoo_nodelet_manager_laserscan
rostopic list
---------------------------------------------------------------
/clicked_point
/diagnostics
/initialpose
/move_base_simple/goal
/rosout
/rosout_agg
/scan
/tf
/tf_static
/timoo_imu
/timoo_nodelet_manager/bond
/timoo_nodelet_manager_cloud/parameter_descriptions
/timoo_nodelet_manager_cloud/parameter_updates
/timoo_nodelet_manager_driver/parameter_descriptions
/timoo_nodelet_manager_driver/parameter_updates
/timoo_nodelet_manager_laserscan/parameter_descriptions
/timoo_nodelet_manager_laserscan/parameter_updates
/timoo_packets
/timoo_points
/timoo_status四、总结
整体我自己跑测试过程还算比较顺利,编译和最后官方的点云查看,基本都是一遍通过,文档支持比较完善,也比较简单明白,没有那么多繁琐的配置。顺道说说TM-16的特点吧:
-
点云清晰稳定,连着跑了8个小时,整体驱动和文档支持很完善,适配过程技术支持比较到位。
-
是不是所有16线激机械式的激光雷达的发热都这么大!!!,但是TM16增加了的顶部散热器,这一点在工艺上助于整体控制温度,但是实际使用中,估计还是要再底部增加辅助散热通道。
-
最重要的,价格确实比起同性能的有优势,性价比之王没的说了。整体质感,工艺,是很对得起这个价格的。
纠错,疑问,交流: [email protected]