一、核心思路
随着科学技术的发展,机器人应用于各种场合,致力于解放劳动力和提升工作效率,为人类的社会生产活动提供很多便利。变电站巡检机器人越来越受到电力行业及相关行业的关注,将现有的技术和巡检机器人结合,对变电站进行设备检查、数据传送和信息存储,使电力系统真正实现决策智能和管理智能。
通过分析整体系统的需求,给出机器人的硬件设计方案,进一步明确巡检机器人的总体架构,详细介绍系统的各部分硬件组成,包括机器人本体结构搭建,各部分电路设计等。巡检机器人软件设计。完成软件部分的设计,电机、舵机驱动程序,远程遥控和智能避障等程序编写,针对高压开关柜长期工作带来的高温现象,设计对其进行自动定位测温的功能,并将以上数据实时上传并存储,以便工作人员后续根据时间地点对高压开关柜的温度值进行查询。系统搭建与测试。将设计好的机器人架构完成实体搭建以及软件程序编写,并对样机的各方面功能进行结果测试,从而验证巡检机器人的可行性。巡检机器人路径规划算法研究。将变电站实际环境进行简化处理并栅格化,根据巡检任务需求选用合适的路径规划算法,并对其作出改进,将算法载入地图模型进行仿真测试,验证算法的先进性。
二、设计与实现
硬件系统是软件和算法设计的基础,根据变电站温度巡检机器人的整体目标要求,对硬件部分进行设计,主要包含各硬件器件的选型和部署,以及搭建数据通信系统。变电站的占地面积大,为扩大其网络的覆盖程度,可通过设置路由器和无线节点来实现无线局域网络覆盖变电站全区域。巡检机器人即可通过无线与终端设备进行数据交换等,机器人的系统框图如图所示。按照系统需求框架,硬件部分主要分为智能机器人、定位测温端和远程控制端。
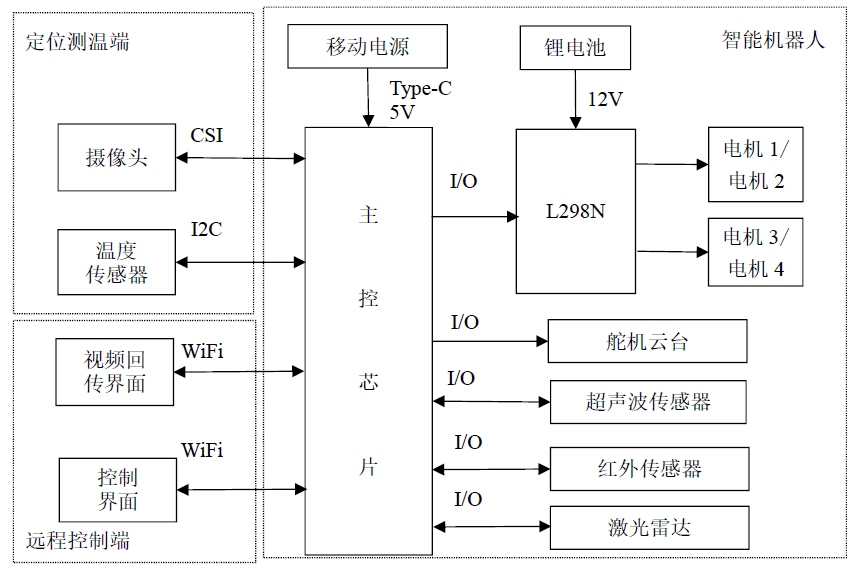
智能机器人部分的电源模块,即锂电池和移动电源共同为整个系统提供电能保障;机器人底盘、主控芯片、电机及其驱动构成基础部分支撑系统后续搭建;配置舵机云台为摄像头扩大视野范围;红外传感器和超声波传感器为智能避障部分提供硬件支撑。电机驱动模块、舵机云台、超声波传感器和红外传感器均与主控芯片的通用输入/输出(General-purpose input/output,GPIO)口相连。远程控制的图像传输界面为远程监控设备,机器人传回的视频图像显示在此设备上;控制界面为遥控端,其与机器人建立通信后,可远程发出控制指令;视频回传界面和远程控制界面均通过WiFi 与机器人进行信息交互。定位测温部分的摄像头与主控芯片连接完成视频拍摄,后续搭载图像处理技术进行定位;温度传感器与主控芯片连接通过 I2C 接口进行通信。
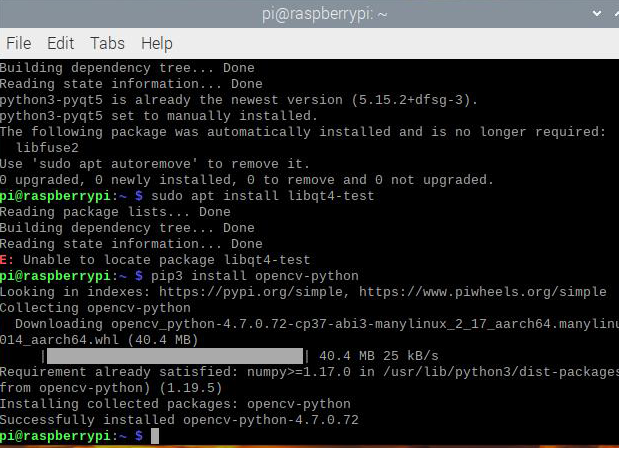
在树莓派系统中安装本实验中涉及到的库,通过在终端依次输入以下指令:(1)sudo apt-get install libatlas-base-dev;(2)sudo apt-get install libjasper-dev;(3) sudo apt-get install libqtgui4;(4)sudo apt-get install python3-pyqt5;(5)sudo apt install libqt4-test;(6)pip install opencv-python 来安装 OpenCV,安装成功界面如图 所示。在终端执行指令:sudo pip3 install pybzar 用于安装pyzbar。此时二维码识别所需要的库均已下载完毕。在终端输入指令:sudo apt-get install spyder 安装 spyder 编译器,编写位置标签识别代码界面如图