理论部分📖
仿射变换包括缩放、平移、旋转、反射、错切,仿射变换后保持不变的性质:
- 凸性:原来是直线仿射变换后还是直线
- 共线性:若几个点变换前在一条线上,则仿射变换后仍然在一条线上
- 平行性:若两条线变换前平行,则变换后仍然平行
- 共线比例不变性:变换前一条线上两条线段的比例,在变换后比例不变
最基础的仿射变换就是线性变换+平移,可以写成如下形式:
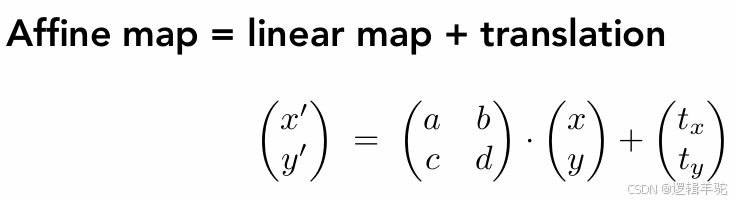
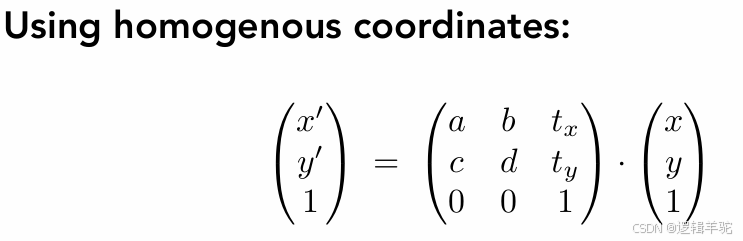
这显然不是线性的,为了把仿射变换变成线性变换,或者说统一变换矩阵的格式,重新定义2D中的点和向量,给它们增加一个维度,那么上面的仿射变换就可以用一个变换矩阵来表示。
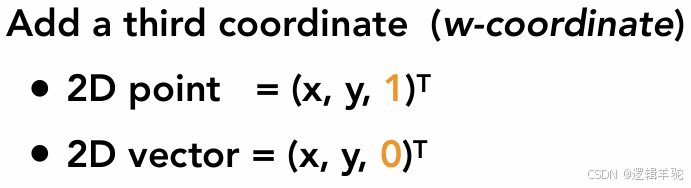
🧐为什么点的第三维是1,而向量的第三维是0?
- 两个点做差即可得到向量。(x1,y1,1)-(x2,y2,1)=(x1-x2,y1-y2,0)
- 向量具有方向性,平移向量不改变其坐标值。tx,ty应该和0相乘
- 两个点相加是它们的中点。(x1,y1,1)+(x2,y2,1)=(x1+x2,y1+y2,2)=((x1+x2)/2,(y1+y2)/2,1)
因此,2D的缩放、旋转、平移矩阵分别如下所示:
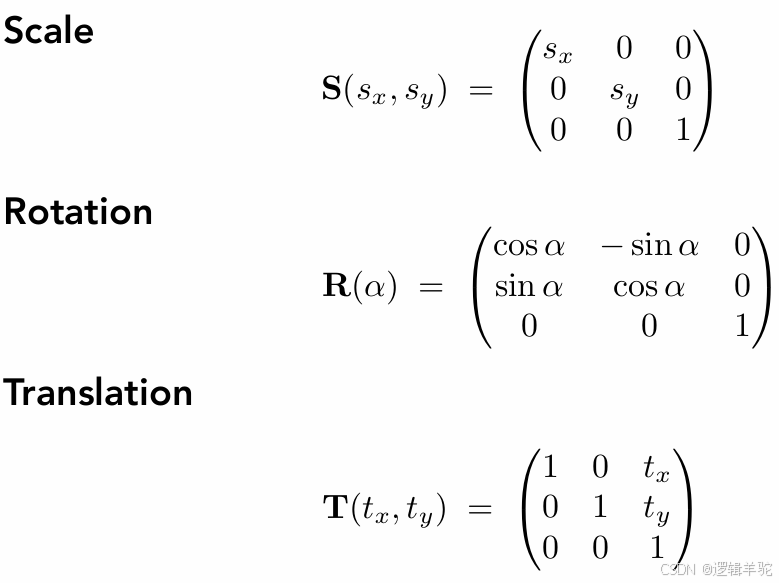
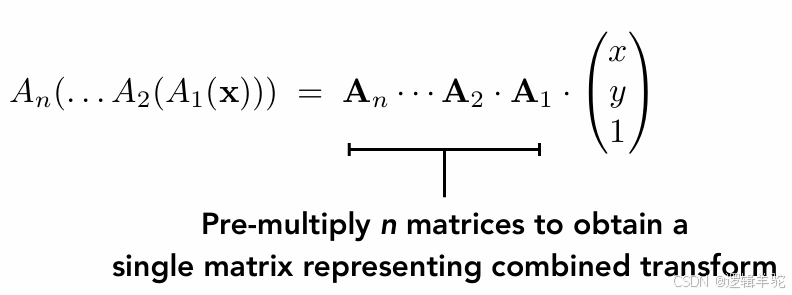
对一个点要做什么变换就把变换矩阵依次乘在该点坐标的左侧,得到的结果即变换后的点的坐标。多个复杂的变换可以压缩成一个变换矩阵。
⚠️两个矩阵相乘没有交换性,故变换矩阵的顺序很重要,不同变换顺序得到的结果是不同的
⚠️如果要逆变换回去,就左乘这个变换矩阵的逆即可
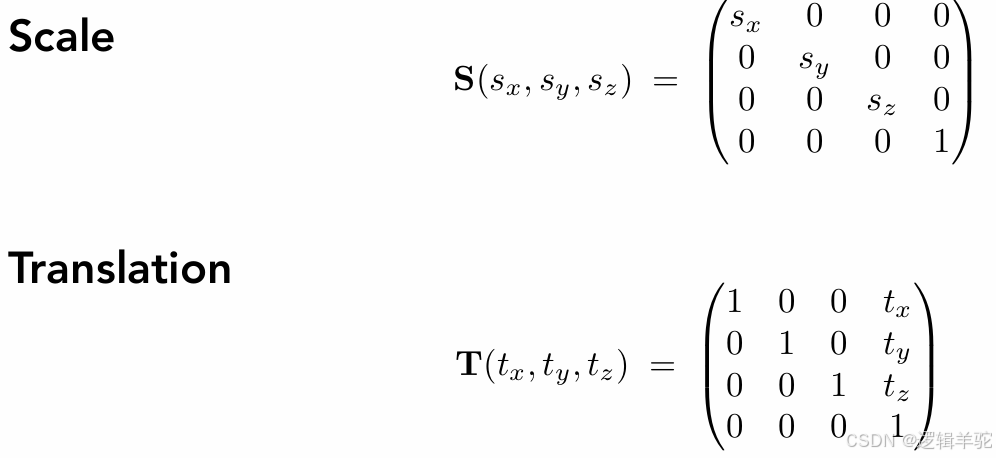
同理,3D空间中的仿射变换如下:

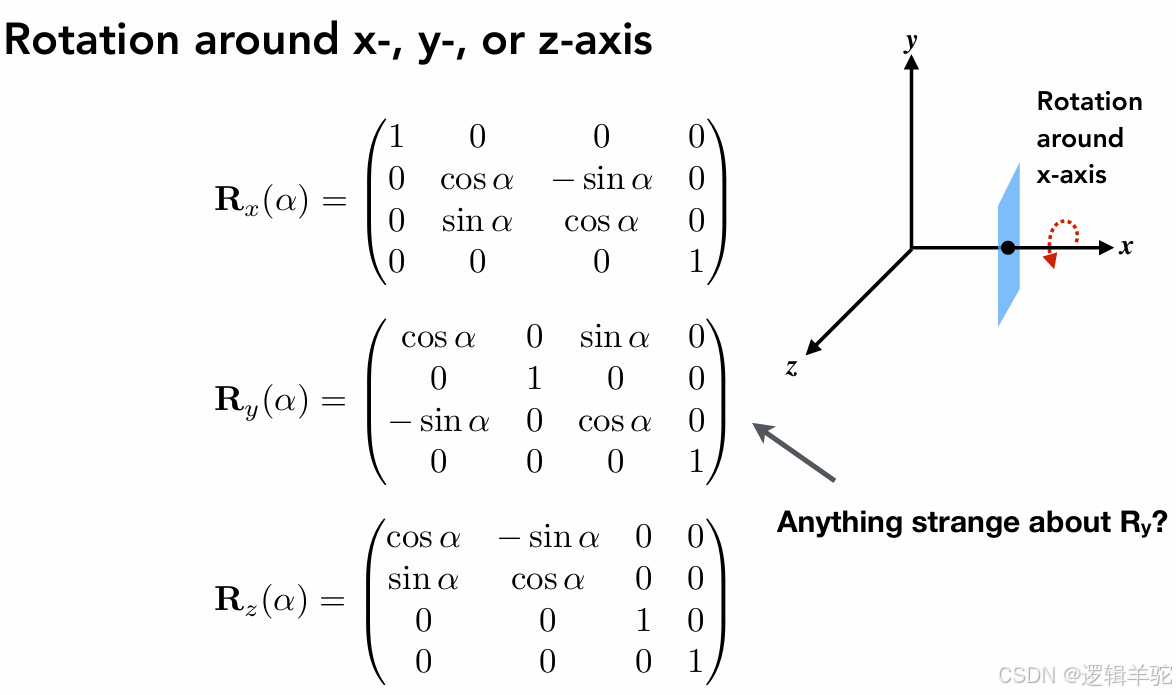
🧐旋转默认是绕原点逆时针旋转。如果要绕任意点,就要先平移到原点,旋转之后再平移回去。关于x/y/z轴旋转,x/y/z坐标不变,对应的就是Rx第一行(1,0,0,0)/Ry第二行(0,1,0,0)/Rz第三行(0,0,1,0)。剩下的用之前的2D旋转矩阵直接填入即可。这里可以形象地理解为,在3D坐标系上,过该点x坐标值做一个垂直平面,也就降维到2D平面了,自然旋转就是2D平面的旋转公式。
🧐此处需要格外注意Ry中的负号,可以这么巧记:先写出Rx和Rz;其次,根据叉乘法则,x×z应该是朝下的,而这里y轴朝上,所以要把Ry里面的α通通换成-α,又因为cos(-α)=cosα,sin(-α)=sin(α),所以Ry中的负号稍有点不同。
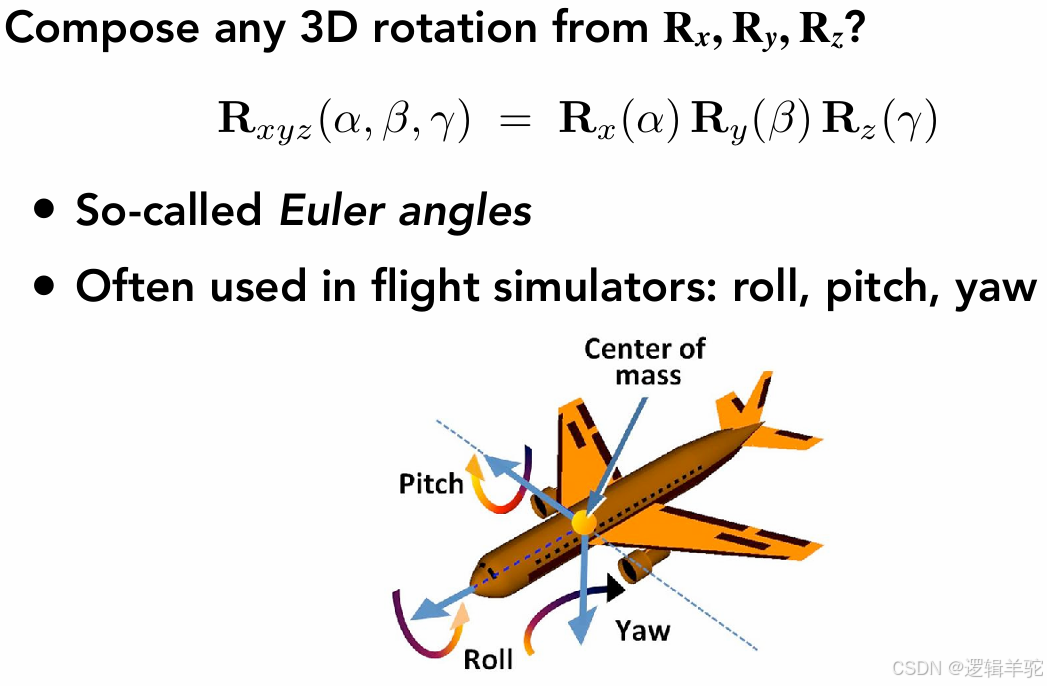
任意旋转都可以拆解成围绕x/y/z轴按一定顺序旋转得到的结果,而围绕x/y/z轴的旋转角统称为欧拉角(Euler angles):
- 围绕x轴的旋转运动叫做pitch,旋转角也叫俯仰角,表现为飞机头部上下运动
- 围绕y轴的旋转运动叫做yaw,旋转角也叫偏航角,表现为飞机头左右转动
- 围绕z轴的旋转运动叫做roll,旋转角也叫横滚角,表现为机翼上下倾斜
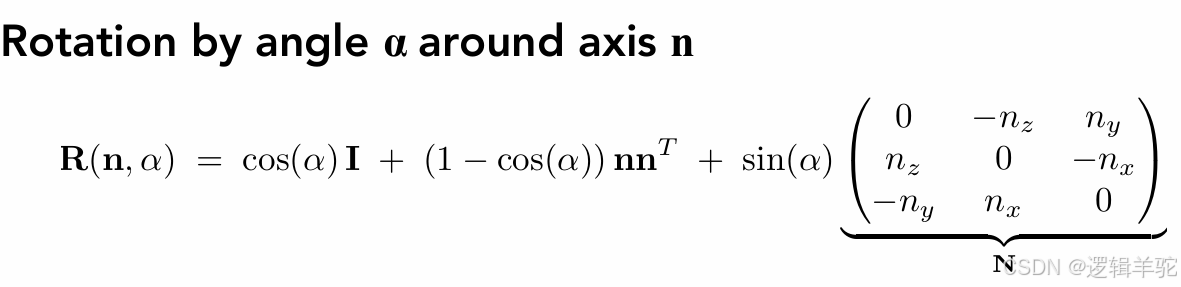
当然,也可以围绕任意轴旋转任意角度,写成统一的变换形式的话如下所示:
Python实现代码
附上Python实现代码——对空间中正方形的8个顶点进行操作,尽量地把解释写在备注里了,改变affine_matrix就可以得到不同的变换矩阵了。
'''
time:2024年11月11日
theme:3D坐标变换
'''
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
# 定义一组三维点,正方形的8个顶点
points = np.array([
[1, 1, 1],
[1, -1, 1],
[-1, -1, 1],
[-1, 1, 1],
[1, 1, -1],
[1, -1, -1],
[-1, -1, -1],
[-1, 1, -1]
])#8*3
# points.shape[0]表示点的数量,points.shape[1]表示每个点的维度
# 将点转换为齐次坐标(增加第四个维度,值为1)
ones = np.ones((points.shape[0], 1)) #生成一个全为1的列向量。np.ones(行,列)
points_h = np.hstack([points, ones]) #np.hstack将points和ones沿列方向(水平)连接,得到一个新的矩阵points_h 8*4
# 定义仿射变换矩阵(包含旋转、缩放和平移)
angle = np.radians(30) # 旋转角度.np.radians将角度转成弧度
scale = 1.2 # 缩放比例
translation = np.array([2, 0, 1]) # 平移向量
# 旋转矩阵 (绕 Z 轴旋转)
x_rotation_matrix = np.array([
[1, 0, 0, 0],
[0, np.cos(angle), -np.sin(angle),0],
[0, np.sin(angle), np.cos(angle) ,0],
[0, 0, 0, 1]
])
z_rotation_matrix = np.array([
[np.cos(angle), -np.sin(angle), 0, 0],
[np.sin(angle), np.cos(angle), 0, 0],
[0, 0, 1, 0],
[0, 0, 0, 1]
])
y_rotation_matrix = np.array([
[np.cos(angle),0,np.sin(angle), 0],
[0,1,0, 0],
[-np.sin(angle),0,np.cos(angle),0],
[0, 0, 0, 1]
])
# 缩放矩阵
scale_matrix = np.array([
[scale, 0, 0, 0],
[0, scale, 0, 0],
[0, 0, scale, 0],
[0, 0, 0, 1]
])
# 平移矩阵
translation_matrix = np.array([
[1, 0, 0, translation[0]],
[0, 1, 0, translation[1]],
[0, 0, 1, translation[2]],
[0, 0, 0, 1]
])
# 合成仿射变换矩阵4*4 @用于计算计算矩阵的乘法 #先缩放再旋转再平移
# affine_matrix = translation_matrix @ z_rotation_matrix @ scale_matrix
affine_matrix = z_rotation_matrix @ translation_matrix
# 应用仿射变换 points_h一行是一个点的齐次坐标,转置变成列之后才符合我们之前的公式
transformed_points_h = (affine_matrix @ points_h.T).T
transformed_points = transformed_points_h[:, :3] #每个点只取前三列
# 绘制原始点和变换后的点
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
# 绘制原始点
ax.scatter(points[:, 0], points[:, 1], points[:, 2], color='blue', label='Original Points')
# 绘制变换后的点
ax.scatter(transformed_points[:, 0], transformed_points[:, 1], transformed_points[:, 2], color='red', label='Transformed Points')
# 设置图例和标签
ax.legend()
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
ax.set_title('3D Affine Transformation of Points')
plt.show()
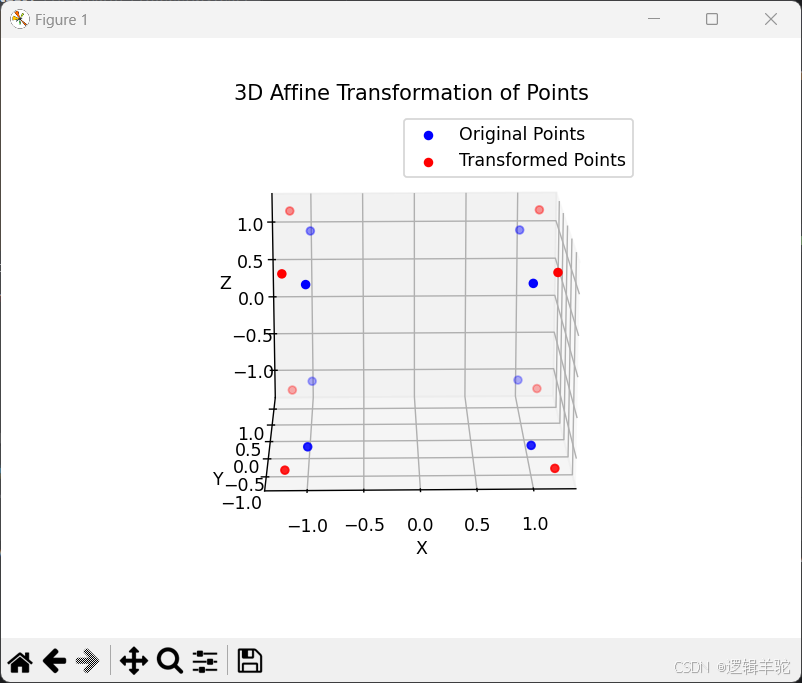
缩放1.2倍、平移(2,0,1)的效果依次如图:
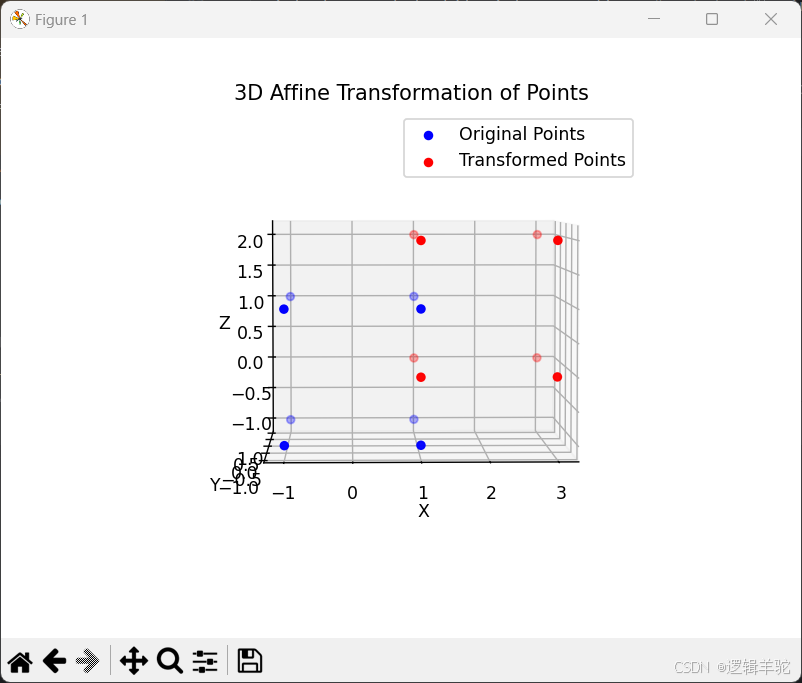
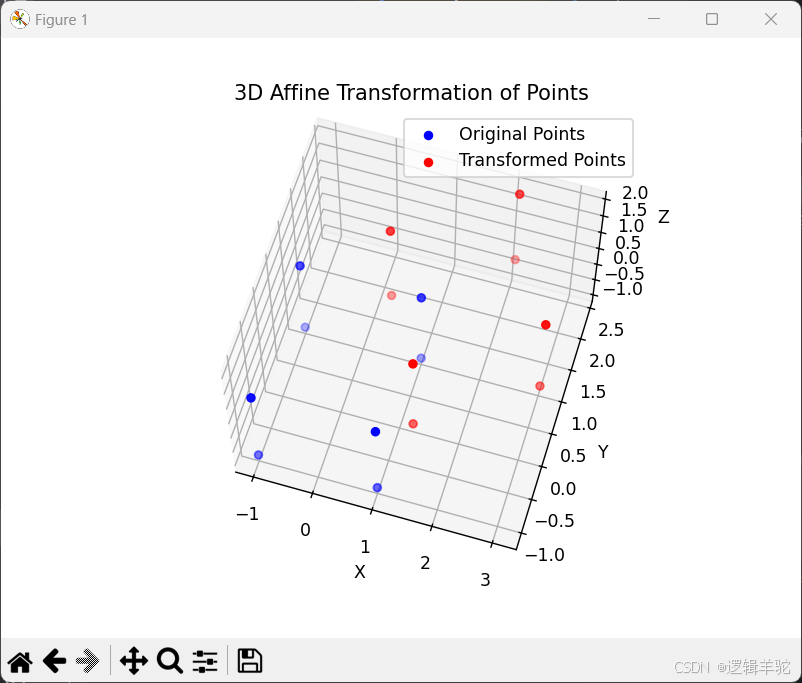
绕z轴逆时针旋转30°再缩放的效果:
这里顺便提一下,关于Python库安装遇到的一个问题,报错信息如下所示:

错误原因:不能使用代理去下载⛓️💥🪜
解决办法:电脑设置→网络和Internet→代理→关闭,即可成功下载
学习课程:闫令琪老师的GAMES101 现代计算机图形学入门Lecture 04 Transformation Cont._哔哩哔哩_bilibili
如果有任何不足或问题,都欢迎大家在评论区留言或私信我,非常期待和大家共同进步✌