文章目录
前言
文章大部分转自微信公众号“牛元昌"————如果该实验对您有帮助的话,希望能大力支持,点个关注,如果能打赏就更好了;B站搜“牛元昌",有对应的实验视频演示及更多实验视频,您的支持是我继续创作的动力,如需要定制代码,请留言说明。
一、实验原理
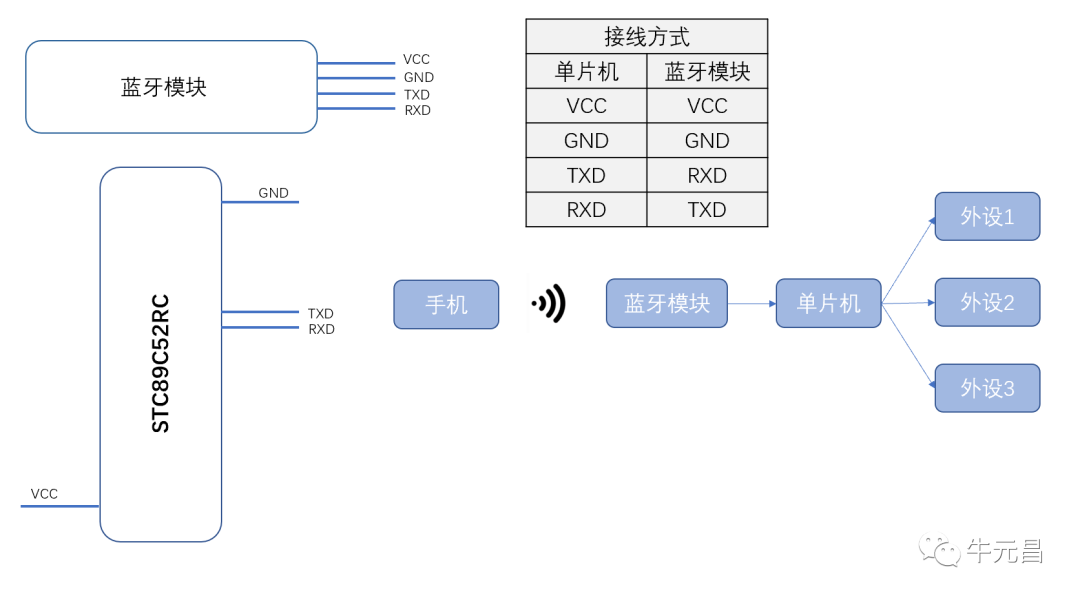
1、该模块与单片机采用串口通信,手机连接蓝牙模块,通过无线信号发送数据给蓝牙模块,蓝牙模块收到数据后会把数据通过串口发送给单片机,单片机收到数据以后,就可以对数据进行处理,完成单片机对外设的控制。
2、此实验需要把蓝牙模块配置为从机模式,若模块出厂默认就是从机模式,就不需要配置了,(如果不知道默认是什么模式,可以询问客服),主从一体的模块,可用AT指令配置成为从机模式就可以了,过程也比较简单,B站上面有很多教程。
二、实验模块
1.蓝牙模块
蓝牙模块的介绍:
蓝牙模块可通过与单片机的串口相连,借助电脑或手机的蓝牙与单片机实现异步全双工通信。常见的蓝牙模块有HC-05主从一体蓝牙模块、HC-06从机蓝牙模块、低功耗BLE蓝牙模块(cc2540或cc2541)。不同的蓝牙模块的AT指令集不完全相同。 工作模式:AT模式,这时我们可以给模块发AT指令,从而可以查询模块的参数或者对模块进行设置。此时指示灯为慢闪状态。\n透传模式,就是当蓝牙模块连接上之后,我们可以直接发送数据给蓝牙模块,而蓝牙模块不管我们发的是什么,都直接传给对方。(这时发AT命令是无效的。) 蓝牙模块的使用:设置使用蓝牙模块的第一步为设置参数,如波特率等。方法为将USB转TTL模块与蓝牙模块连接,连接方法为\n\n并将USB转TTL模块插入电脑,检查设备管理器是否显示串口。然后使用串口调试助手写入AT指令进行查询或操作指令。蓝牙模块的响应将在串口调试助手的接收区显示。
2.sg90舵机模块

SG90舵机简介
SG90舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
SG90舵机应用
SG90舵机目前在高档遥控玩具,如航模、包括飞机模型、潜艇模型、遥控机器人中已经使用得比较普遍。
SG90舵机导线
SG90舵机上有三根线,分别是GND(棕色线)、VCC(红色线)和SIG(黄色线),也就是地线、电源线和信号线
代码如下(示例):
/*
模拟舵机控制原理:0~180°
0.5ms-----0度
1.0ms-----45度
1.5ms-----90度
2.0ms-----135度
2.5ms-----180度
*/
#include <REGX52.H>
#include "timer0.h"
#include "Uart.h"
#include "Delay.h"
sbit SG_PWM=P1^0; //信号控制引脚
unsigned char count=0; //计次 赋初值为0
unsigned char PWM_count=0; //0--0度,2--45度,4--90度,6--135度,8--180度
unsigned char i;
void main()
{
Timer0_Init();
Uart_Init();
while(1)
{
}
}
void Timer0() interrupt 1 //特别注意此处,0--外部中断0,1--定时器中断0,2--外部中断1,3--定时器中断1,4--串行口中断1
{
TL0 = 0x33;
TH0 = 0xFE; //重新赋计数初值为0.5ms
count++; //计次,每500us count+1
count%=40; //周期为20ms
if(count<PWM_count)
{
SG_PWM=1;
}
else
{
SG_PWM=0;
}
}
void UART_Routine() interrupt 4 //串口中断服务函数
{
if(RI==1) //如果接收中断标志位为1
{
P1=SBUF; //发送的数据SBUF,赋给P1
if(P1==0X01) //0x01这个值可以通过蓝牙调试器编辑模式设置
{
PWM_count=1;
}
if(P1==0X02)
{
PWM_count=2;
}
if(P1==0X03)
{
PWM_count=3;
}
if(P1==0X04)
{
PWM_count=4;
}
if(P1==0X05)
{
PWM_count=5;
}
for(i = 1; i <= 3; i++)
{
if(P1==0X06)
{
PWM_count=3;
PWM_count=PWM_count-i;
}
if(P1==0X07)
{
PWM_count=3;
PWM_count = PWM_count+i;
}
}
RI=0; //接收中断标志位软件清零
}
}
总结(演示)
百度网盘:
链接:https://pan.baidu.com/s/1wOJ43Gf3_c2PyhR1tMzdpw
提取码:6666
蓝牙软件:手机应用市场搜索“蓝牙调试器”,即可下载;其他的蓝牙软件也同样适用。