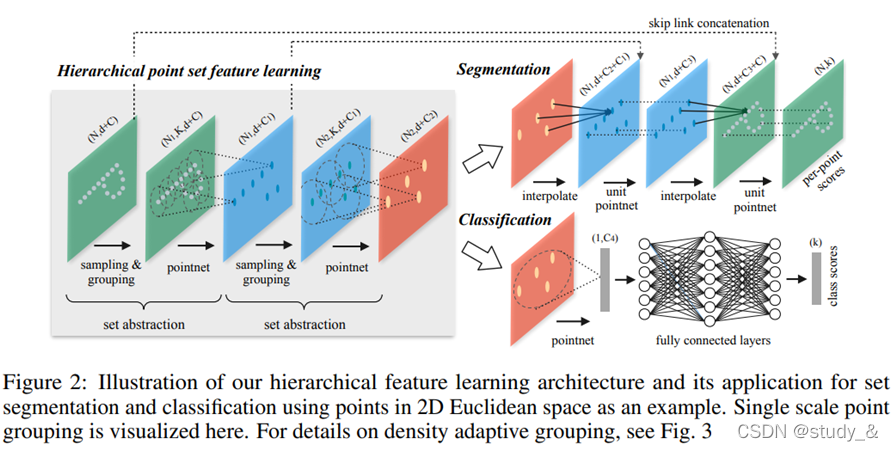
1.PointNet++分割任务
分割任务
分为Set Abstraction layers特征提取 , Feature Propagation layers特征传递 , FC layers全链接 三个模块。一个类似unet的结构,整个分割网络的代码如下:
# Set Abstraction layers
l1_xyz, l1_points, l1_indices = pointnet_sa_module(l0_xyz, l0_points, npoint=512, radius=0.2, nsample=64, mlp=[64,64,128], mlp2=None, group_all=False, is_training=is_training, bn_decay=bn_decay, scope='layer1')
l2_xyz, l2_points, l2_indices = pointnet_sa_module(l1_xyz, l1_points, npoint=128, radius=0.4, nsample=64, mlp=[128,128,256], mlp2=None, group_all=False, is_training=is_training, bn_decay=bn_decay, scope='layer2')
l3_xyz, l3_points, l3_indices = pointnet_sa_module(l2_xyz, l2_points, npoint=None, radius=None, nsample=None, mlp=[256,512,1024], mlp2=None, group_all=True, is_training=is_training, bn_decay=bn_decay, scope='layer3')
# Feature Propagation layers
l2_points = pointnet_fp_module(l2_xyz, l3_xyz, l2_points, l3_points, [256,256], is_training, bn_decay, scope='fa_layer1')
l1_points = pointnet_fp_module(l1_xyz, l2_xyz, l1_points, l2_points, [256,128], is_training, bn_decay, scope='fa_layer2')
l0_points = pointnet_fp_module(l0_xyz, l1_xyz, tf.concat([l0_xyz,l0_points],axis=-1), l1_points, [128,128,128], is_training, bn_decay, scope='fa_layer3')
# FC layers
net = tf_util.conv1d(l0_points, 128, 1, padding='VALID', bn=True, is_training=is_training, scope='fc1', bn_decay=bn_decay)
end_points['feats'] = net
net = tf_util.dropout(net, keep_prob=0.5, is_training=is_training, scope='dp1')
net = tf_util.conv1d(net, 50, 1, padding='VALID', activation_fn=None, scope='fc2')
- SA module 特征提取模块:下采样。输入是(N,D)表示N个D维特征的points,输出是(N’,D’)表示N’个下采样之后的点,每个点采用最远点采样寻找N’个中心点,通过pointnet计算得到N’维度的特征。前面的分类网络说过不再赘述。
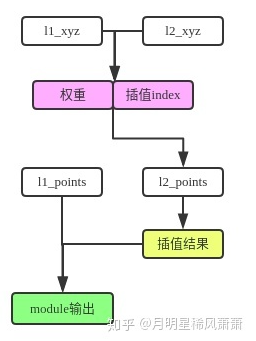
- FP module 特征传递模块:用来上采样。
采用反距离加权插值(把距离的倒数作为weight)。这种插值输入(N, D),输出(N’, D),保证输入的特征维度不变。
白色代表输入,绿色代表输出。
代码如下:
def pointnet_fp_module(xyz1, xyz2, points1, points2, mlp, is_training, bn_decay, scope, bn=True):
''' PointNet Feature Propogation (FP) Module
Input:
xyz1: (batch_size, ndataset1, 3) TF tensor
xyz2: (batch_size, ndataset2, 3) TF tensor, sparser than xyz1
points1: (batch_size, ndataset1, nchannel1) TF tensor
points2: (batch_size, ndataset2, nchannel2) TF tensor
mlp: list of int32 -- output size for MLP on each point
Return:
new_points: (batch_size, ndataset1, mlp[-1]) TF tensor
'''
with tf.variable_scope(scope) as sc:
dist, idx = three_nn(xyz1, xyz2)
dist = tf.maximum(dist, 1e-10)
norm = tf.reduce_sum((1.0/dist),axis=2,keep_dims=True)
norm = tf.tile(norm,[1,1,3])
weight = (1.0/dist) / norm #weight is the inverse of distance
# interpolate
interpolated_points = three_interpolate(points2, idx, weight)
if points1 is not None:
new_points1 = tf.concat(axis=2, values=[interpolated_points, points1]) # B,ndataset1,nchannel1+nchannel2
else:
new_points1 = interpolated_points
new_points1 = tf.expand_dims(new_points1, 2)
for i, num_out_channel in enumerate(mlp):
new_points1 = tf_util.conv2d(new_points1, num_out_channel, [1,1],
padding='VALID', stride=[1,1],
bn=bn, is_training=is_training,
scope='conv_%d'%(i), bn_decay=bn_decay)
new_points1 = tf.squeeze(new_points1, [2]) # B,ndataset1,mlp[-1]
return new_points1
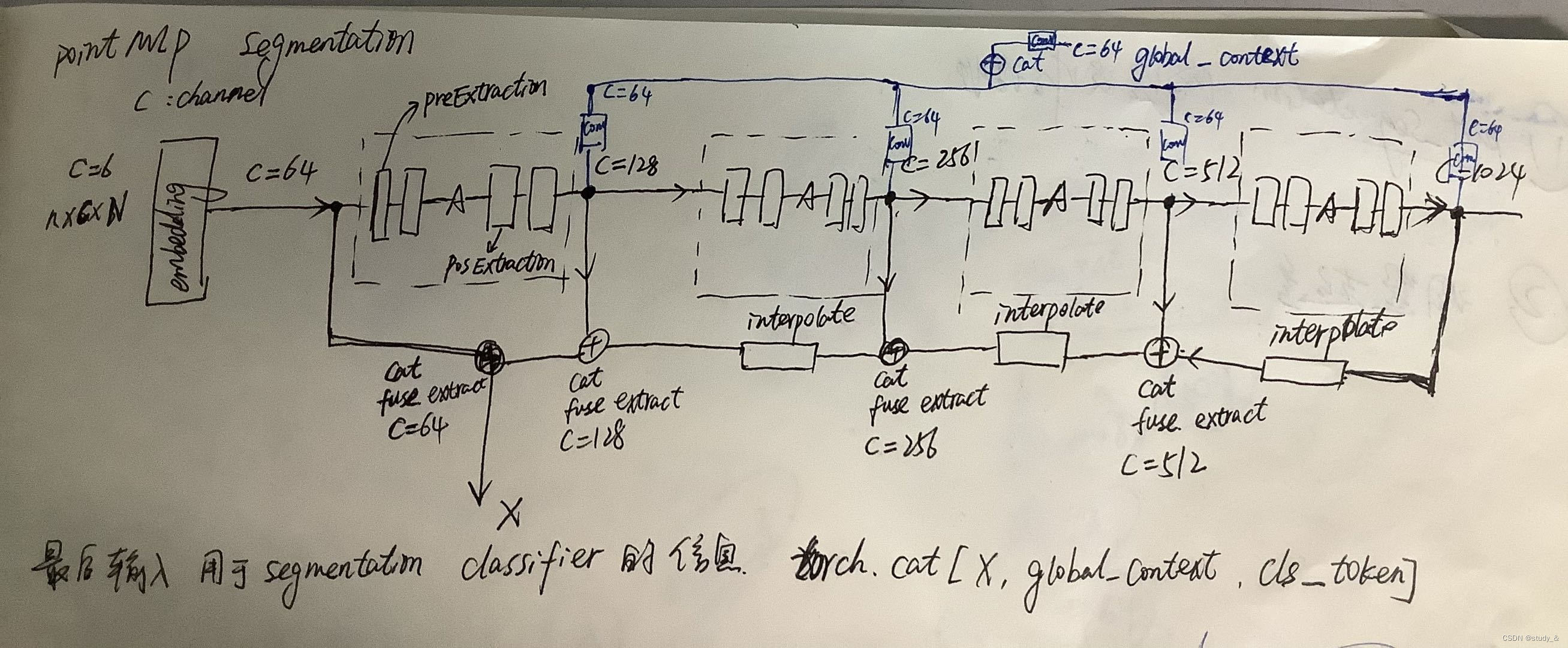
2.PointMLP segmentation关键代码段
segmentation部分示意图
class PointNetFeaturePropagation(nn.Module):
def __init__(self, in_channel, out_channel, blocks=1, groups=1, res_expansion=1.0, bias=True, activation='relu'):
super(PointNetFeaturePropagation, self).__init__()
self.fuse = ConvBNReLU1D(in_channel, out_channel, 1, bias=bias)
self.extraction = PosExtraction(out_channel, blocks, groups=groups,
res_expansion=res_expansion, bias=bias, activation=activation)
def forward(self, xyz1, xyz2, points1, points2):
"""
Input:
xyz1: input points position data, [B, N, 3]
xyz2: sampled input points position data, [B, S, 3]
points1: input points data, [B, D', N]
points2: input points data, [B, D'', S]
Return:
new_points: upsampled points data, [B, D''', N]
"""
# xyz1 = xyz1.permute(0, 2, 1)
# xyz2 = xyz2.permute(0, 2, 1)
points2 = points2.permute(0, 2, 1)
B, N, C = xyz1.shape
_, S, _ = xyz2.shape
if S == 1:
interpolated_points = points2.repeat(1, N, 1)
else:
dists = square_distance(xyz1, xyz2)
dists, idx = dists.sort(dim=-1)
dists, idx = dists[:, :, :3], idx[:, :, :3] # [B, N, 3]
dist_recip = 1.0 / (dists + 1e-8)
norm = torch.sum(dist_recip, dim=2, keepdim=True)
weight = dist_recip / norm
interpolated_points = torch.sum(index_points(points2, idx) * weight.view(B, N, 3, 1), dim=2)
if points1 is not None:
points1 = points1.permute(0, 2, 1)
new_points = torch.cat([points1, interpolated_points], dim=-1)
else:
new_points = interpolated_points
new_points = new_points.permute(0, 2, 1)
new_points = self.fuse(new_points)
new_points = self.extraction(new_points)
return new_points
class PointMLP(nn.Module):
def __init__(self, num_classes=50,points=2048, embed_dim=64, groups=1, res_expansion=1.0,
activation="relu", bias=True, use_xyz=True, normalize="anchor",
dim_expansion=[2, 2, 2, 2], pre_blocks=[2, 2, 2, 2], pos_blocks=[2, 2, 2, 2],
k_neighbors=[32, 32, 32, 32], reducers=[4, 4, 4, 4],
de_dims=[512, 256, 128, 128], de_blocks=[2,2,2,2],
gmp_dim=64,cls_dim=64, **kwargs):
super(PointMLP, self).__init__()
self.stages = len(pre_blocks)
self.class_num = num_classes
self.points = points #points=2048
self.embedding = ConvBNReLU1D(6, embed_dim, bias=bias, activation=activation)
assert len(pre_blocks) == len(k_neighbors) == len(reducers) == len(pos_blocks) == len(dim_expansion), \
"Please check stage number consistent for pre_blocks, pos_blocks k_neighbors, reducers."
self.local_grouper_list = nn.ModuleList()
self.pre_blocks_list = nn.ModuleList()
self.pos_blocks_list = nn.ModuleList()
last_channel = embed_dim ##embed_dim=64
anchor_points = self.points #points=2048
en_dims = [last_channel] ####相比cls任务多出来的变量 en_dims=64
### Building Encoder #####
for i in range(len(pre_blocks)): # len(pre_blocks)=4
out_channel = last_channel * dim_expansion[i] #每次输出维度都以2倍扩大 dim_expansion=[2, 2, 2, 2]
pre_block_num = pre_blocks[i]
pos_block_num = pos_blocks[i]
kneighbor = k_neighbors[i] #k_neighbors=[32, 32, 32, 32]
reduce = reducers[i] #reducers=[4, 4, 4, 4] anchor_points[2048 1024 512 256]
anchor_points = anchor_points // reduce
# append local_grouper_list
local_grouper = LocalGrouper(last_channel, anchor_points, kneighbor, use_xyz, normalize) # [b,g,k,d] last_channel [64 128 256 512] 不是实际channel 作用不大
self.local_grouper_list.append(local_grouper)
# append pre_block_list
pre_block_module = PreExtraction(last_channel, out_channel, pre_block_num, groups=groups,
res_expansion=res_expansion,
bias=bias, activation=activation, use_xyz=use_xyz)
self.pre_blocks_list.append(pre_block_module)
# append pos_block_list
pos_block_module = PosExtraction(out_channel, pos_block_num, groups=groups,
res_expansion=res_expansion, bias=bias, activation=activation)
self.pos_blocks_list.append(pos_block_module)
last_channel = out_channel
en_dims.append(last_channel) ### [embed_dim,128,256,512,1024] embed=64 seg和cls不一样的行,从此行开始,把每个输出维度都存了起来(输出维度都以两倍增大)
### Building Decoder #####
self.decode_list = nn.ModuleList()
en_dims.reverse() # en_dims=[1024,512,256,128,64]
de_dims.insert(0,en_dims[0]) # de_dims=[1024, 512, 256, 128, 128]
assert len(en_dims) ==len(de_dims) == len(de_blocks)+1
for i in range(len(en_dims)-1): #len(en_dims)-1 = 4 4次循环
self.decode_list.append(
PointNetFeaturePropagation(de_dims[i]+en_dims[i+1], de_dims[i+1],
blocks=de_blocks[i], groups=groups, res_expansion=res_expansion,
bias=bias, activation=activation)
)
#第一次:input channel:1024+512 output channel:512
#第二次:input channel:512+256 output channel:256
#第三次:input channel:256+128 output channel:128
#第四次:input channel:128+62 output channel:128
self.act = get_activation(activation)
# class label mapping
self.cls_map = nn.Sequential( #类别有16类,所以初始通道数16 cls_dim=64
ConvBNReLU1D(16, cls_dim, bias=bias, activation=activation),
ConvBNReLU1D(cls_dim, cls_dim, bias=bias, activation=activation)
)
# global max pooling mapping
self.gmp_map_list = nn.ModuleList()
for en_dim in en_dims:# en_dims=[1024,512,256,128,64] gmp_dim=64
self.gmp_map_list.append(ConvBNReLU1D(en_dim, gmp_dim, bias=bias, activation=activation))
self.gmp_map_end = ConvBNReLU1D(gmp_dim*len(en_dims), gmp_dim, bias=bias, activation=activation)
# classifier
self.classifier = nn.Sequential( #gmp_dim=64 cls_dim=64 de_dims=[1024, 512, 256, 128, 128]
nn.Conv1d(gmp_dim+cls_dim+de_dims[-1], 128, 1, bias=bias), # 输入64+64+128 输出128
nn.BatchNorm1d(128),
nn.Dropout(),
nn.Conv1d(128, num_classes, 1, bias=bias)
)
self.en_dims = en_dims
def forward(self, x, norm_plt, cls_label): #norm_plt应该指norm
xyz = x.permute(0, 2, 1)
x = torch.cat([x,norm_plt],dim=1) #xyz和norm的结合 通道数6
x = self.embedding(x) # B,D,N #通道数6 ->embed_dim=64
xyz_list = [xyz] # [B, N, 3]
x_list = [x] # [B, D, N]
# here is the encoder
# self.stages=4 pre_block_module:[128 256 512 1024]
# local_grouper_list output channel:[64 128 256 512] anchor_points[2048 1024 512 256]
# 第一次 x input channel:64 output channel:128
# 第二次 x input channel:128 output channel:256
# 第三次 x input channel:256 output channel:512
# 第四次 x input channel:512 output channel:1024
for i in range(self.stages):
# Give xyz[b, p, 3] and fea[b, p, d], return new_xyz[b, g, 3] and new_fea[b, g, k, d]
xyz, x = self.local_grouper_list[i](xyz, x.permute(0, 2, 1)) # [b,g,3] [b,g,k,d]
x = self.pre_blocks_list[i](x) # [b,d,g]
x = self.pos_blocks_list[i](x) # [b,d,g]
xyz_list.append(xyz) # 每次采样后的xyz都存在xyz_list
x_list.append(x) #经过pre和pos处理的数据x 每个stage的x都存在x_list [128 256 512 1024]
# here is the decoder
xyz_list.reverse()
x_list.reverse() #x_list [1024 512 256 128]
x = x_list[0]
for i in range(len(self.decode_list)):
x = self.decode_list[i](xyz_list[i+1], xyz_list[i], x_list[i+1],x)
# here is the global context
gmp_list = []
for i in range(len(x_list)):
gmp_list.append(F.adaptive_max_pool1d(self.gmp_map_list[i](x_list[i]), 1))
global_context = self.gmp_map_end(torch.cat(gmp_list, dim=1)) # [b, gmp_dim, 1]
#here is the cls_token
cls_token = self.cls_map(cls_label.unsqueeze(dim=-1)) # [b, cls_dim, 1]
x = torch.cat([x, global_context.repeat([1, 1, x.shape[-1]]), cls_token.repeat([1, 1, x.shape[-1]])], dim=1)
x = self.classifier(x)
x = F.log_softmax(x, dim=1)
x = x.permute(0, 2, 1)
return x
2.PAconv segmentation任务代码
class PAConv(nn.Module):
def __init__(self, args, num_part):
super(PAConv, self).__init__()
# baseline args:
self.args = args
self.num_part = num_part
# PAConv args:
self.k = args.get('k_neighbors', 30)
self.calc_scores = args.get('calc_scores', 'softmax')
self.hidden = args.get('hidden', [[16], [16], [16], [16]]) # the hidden layers of ScoreNet
self.m2, self.m3, self.m4, self.m5 = args.get('num_matrices', [8, 8, 8, 8])
self.scorenet2 = ScoreNet(10, self.m2, hidden_unit=self.hidden[0])
self.scorenet3 = ScoreNet(10, self.m3, hidden_unit=self.hidden[1])
self.scorenet4 = ScoreNet(10, self.m4, hidden_unit=self.hidden[2])
self.scorenet5 = ScoreNet(10, self.m5, hidden_unit=self.hidden[3])
i2 = 64 # channel dim of input_2nd
o2 = i3 = 64 # channel dim of output_2st and input_3rd
o3 = i4 = 64 # channel dim of output_3rd and input_4th
o4 = i5 = 64 # channel dim of output_4th and input_5th
o5 = 64 # channel dim of output_5th
tensor2 = nn.init.kaiming_normal_(torch.empty(self.m2, i2 * 2, o2), nonlinearity='relu') \
.permute(1, 0, 2).contiguous().view(i2 * 2, self.m2 * o2)
tensor3 = nn.init.kaiming_normal_(torch.empty(self.m3, i3 * 2, o3), nonlinearity='relu') \
.permute(1, 0, 2).contiguous().view(i3 * 2, self.m3 * o3)
tensor4 = nn.init.kaiming_normal_(torch.empty(self.m4, i4 * 2, o4), nonlinearity='relu') \
.permute(1, 0, 2).contiguous().view(i4 * 2, self.m4 * o4)
tensor5 = nn.init.kaiming_normal_(torch.empty(self.m5, i5 * 2, o5), nonlinearity='relu') \
.permute(1, 0, 2).contiguous().view(i4 * 2, self.m5 * o5)
self.matrice2 = nn.Parameter(tensor2, requires_grad=True)
self.matrice3 = nn.Parameter(tensor3, requires_grad=True)
self.matrice4 = nn.Parameter(tensor4, requires_grad=True)
self.matrice5 = nn.Parameter(tensor5, requires_grad=True)
self.bn2 = nn.BatchNorm1d(64, momentum=0.1)
self.bn3 = nn.BatchNorm1d(64, momentum=0.1)
self.bn4 = nn.BatchNorm1d(64, momentum=0.1)
self.bn5 = nn.BatchNorm1d(64, momentum=0.1)
self.bnt = nn.BatchNorm1d(1024, momentum=0.1)
self.bnc = nn.BatchNorm1d(64, momentum=0.1)
self.bn6 = nn.BatchNorm1d(256, momentum=0.1)
self.bn7 = nn.BatchNorm1d(256, momentum=0.1)
self.bn8 = nn.BatchNorm1d(128, momentum=0.1)
self.conv1 = nn.Sequential(nn.Conv2d(6, 64, kernel_size=1, bias=True),
nn.BatchNorm2d(64, momentum=0.1))
self.convt = nn.Sequential(nn.Conv1d(64*5, 1024, kernel_size=1, bias=False),
self.bnt)
self.convc = nn.Sequential(nn.Conv1d(16, 64, kernel_size=1, bias=False),
self.bnc)
self.conv6 = nn.Sequential(nn.Conv1d(1088+64*5, 256, kernel_size=1, bias=False),
self.bn6)
self.dp1 = nn.Dropout(p=args.get('dropout', 0.4))
self.conv7 = nn.Sequential(nn.Conv1d(256, 256, kernel_size=1, bias=False),
self.bn7)
self.dp2 = nn.Dropout(p=args.get('dropout', 0.4))
self.conv8 = nn.Sequential(nn.Conv1d(256, 128, kernel_size=1, bias=False),
self.bn8)
self.conv9 = nn.Conv1d(128, num_part, kernel_size=1, bias=True)
def forward(self, x, norm_plt, cls_label, gt=None):
B, C, N = x.size()
idx, _ = knn(x, k=self.k) # different with DGCNN, the knn search is only in 3D space
xyz = get_scorenet_input(x, k=self.k, idx=idx) # ScoreNet input
#################
# use MLP at the 1st layer, same with DGCNN
x = get_graph_feature(x, k=self.k, idx=idx)
x = x.permute(0, 3, 1, 2) # b,2cin,n,k
x = F.relu(self.conv1(x))
x1 = x.max(dim=-1, keepdim=False)[0]
#################
# replace the last 4 DGCNN-EdgeConv with PAConv:
"""CUDA implementation of PAConv: (presented in the supplementary material of the paper)"""
"""feature transformation:"""
x2, center2 = feat_trans_dgcnn(point_input=x1, kernel=self.matrice2, m=self.m2)
score2 = self.scorenet2(xyz, calc_scores=self.calc_scores, bias=0)
"""assemble with scores:"""
x = assemble_dgcnn(score=score2, point_input=x2, center_input=center2, knn_idx=idx, aggregate='sum')
x2 = F.relu(self.bn2(x))
x3, center3 = feat_trans_dgcnn(point_input=x2, kernel=self.matrice3, m=self.m3)
score3 = self.scorenet3(xyz, calc_scores=self.calc_scores, bias=0)
x = assemble_dgcnn(score=score3, point_input=x3, center_input=center3, knn_idx=idx, aggregate='sum')
x3 = F.relu(self.bn3(x))
x4, center4 = feat_trans_dgcnn(point_input=x3, kernel=self.matrice4, m=self.m4)
score4 = self.scorenet4(xyz, calc_scores=self.calc_scores, bias=0)
x = assemble_dgcnn(score=score4, point_input=x4, center_input=center4, knn_idx=idx, aggregate='sum')
x4 = F.relu(self.bn4(x))
x5, center5 = feat_trans_dgcnn(point_input=x4, kernel=self.matrice5, m=self.m5)
score5 = self.scorenet5(xyz, calc_scores=self.calc_scores, bias=0)
x = assemble_dgcnn(score=score5, point_input=x5, center_input=center5, knn_idx=idx, aggregate='sum')
x5 = F.relu(self.bn5(x))
###############
xx = torch.cat((x1, x2, x3, x4, x5), dim=1)
xc = F.relu(self.convt(xx)) #input channel:64*5 output channel: 1024
xc = F.adaptive_max_pool1d(xc, 1).view(B, -1)
cls_label = cls_label.view(B, 16, 1)
cls_label = F.relu(self.convc(cls_label)) #input channel:16 output channel:64
cls = torch.cat((xc.view(B, 1024, 1), cls_label), dim=1) #cat后 output channel:1088
cls = cls.repeat(1, 1, N) # B,1088,N
x = torch.cat((xx, cls), dim=1) # 1088+64*3
x = F.relu(self.conv6(x))
x = self.dp1(x)
x = F.relu(self.conv7(x))
x = self.dp2(x)
x = F.relu(self.conv8(x))
x = self.conv9(x)
x = F.log_softmax(x, dim=1)
x = x.permute(0, 2, 1) # b,n,50
if gt is not None:
return x, F.nll_loss(x.contiguous().view(-1, self.num_part), gt.view(-1, 1)[:, 0])
else:
return x
参考:
【1】论文笔记:PointNet++论文代码讨论