- 概述
任务来源于无人机侦察研制任务,涵盖无人机目标昼夜识别与跟踪、目标定位等功能任务。
无人机侦察系统设备构成如下图所示,分为光电云台、激光打击设备与操控端构成。

图 1 设备组成与链路
光电云台完成无人机目标自主识别与搜索并锁定跟踪、视频与搜跟状态信息传输等功能。
激光打击设备用于大功率激光器打击无人机,安装与单轴转动平台上。
转动平台上安装光电云台与激光打击设备激光器光学组合。
操控端运行管理软件,用于设备参数与工作模式设置、手动控制、过程记录。
以下分各个组件,分功能进行详细说明。
光电云台由:多波段光电相机、云台、识别跟踪器与云台控制组件构成。
云台同时结合了高倍率光学变焦星光级摄像机、高灵敏度热成像机、以及军用高精度激光测距仪、两轴伺服平台。

图 2 各组件连接关系

图 3 三光云台结构
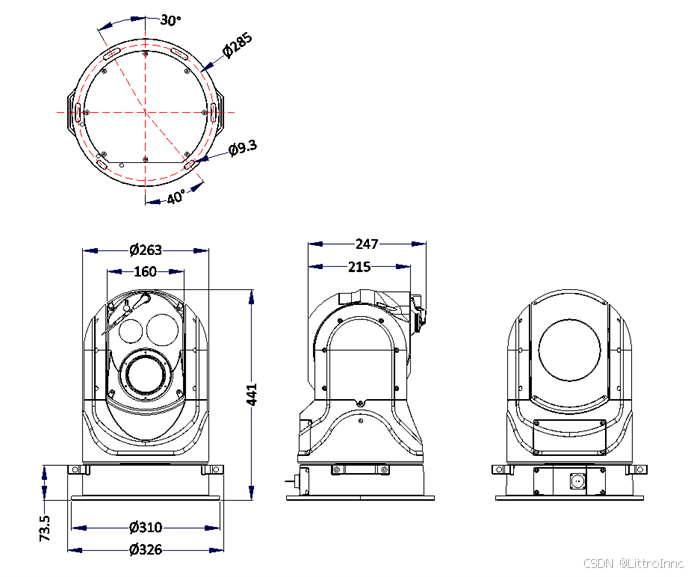
图 4 云台结构尺寸
云台采用航空铝合金精密加工而成,强度高、具有良好的吸振、抗雨、防尘、抗腐蚀能力,能够适应恶劣的野外工作环境。云台通过结构固定到旋转平台上。
- 变焦星光级可见光摄像机
可见光成像采用了30倍光学连续变焦镜头,焦距覆盖4.3~129.0mm,可满足1Km距离下0.35mm Marvic3大小的小型无人机识别的图像要求。具备自动对焦、自动日夜切换、自动宽动态调节、数字变焦、自动降噪等功能。

图 5 可见光无人机实拍照片
- 高灵敏度热红外成像机
热红外成像器采用1280×1024非制冷焦平面探测器,像元尺寸为12微米,画面更为细腻,视场角是普通640分辨率热红外的4倍,极大提高了目标搜索的效率。
热红外成像器具有多种伪彩显示切换、图像增强配置、数字变倍等功能。
镜头焦距采用50mm F1.0,满足300米内的0.35mm Marvic3大小的小型无人机识别。

图 6 1280热红外成像图


图 7 热红外无人机实拍照片
- 高精度激光测距仪
激光测距模块发射激光扩散角为0.6mrad,波长采用1535nm,无人机测距距离在1Km。严格的光轴平行校准可确保激光测距目标始终位于视觉采集画面的中心点。
- 两轴伺服平台
伺服采用两轴稳像控制方式,包含了水平电机、俯仰电机,可实现两个自由度的转动控制,从而完成360°无死角旋转,可自由获取无拘束的全方位视野。为了更方便与通用的伺服控制方式,伺服控制协议采用标准Pelco-D协议与LPP无级变速协议复合型协议。
控制协议包含数据格式: 1位起始位,8位数据,1位停止位,无效验位,波特率:9600B/S
命令格式:
| 字节1 | 字节2 | 字节3 | 字节4 | 字节5 | 字节6 | 字节7 |
| 同步字节 | 地址码 | 指令码1 | 指令码2 | 数据码1 | 数据码2 | 校验码 |
*1.该协议所有数值都为十六进制数
*2.同步字节始终为FFH
*3.地址码为摄像机的逻辑地址号,地址范围:00H-FFH;
指令码的格式如下:
| BIT7 | BIT6 | BIT5 | BIT4 | BIT3 | BIT2 | BIT1 | BIT0 | |
| 指令码1 | 0 | 0 | 0 | Auto Scan | 0 | Iris Close | Iris Open | Focus Near |
| 指令码2 | Focus Far | Zoom wide | Zoom Tele | Down | Up | Left | Right | 0 |
*1.指令码 1:BIT7,BIT6,BIT5, BIT3 位始终为0: BIT4为自动扫描功能控制位(1/0:打开/关闭该功能), BIT2 光圈缩小(1有效); BIT1光圈扩大(1有效); BIT0近距离聚然(1有效);
*2.指令码2: BIT7远距离聚焦(1有效),BIT6和BIT5控制摄像机的变倍,BIT6远离物体(1有效), BIT5接近物体(1有效);BIT4、BIT3、BIT2、BIT1分别控制下,上,左,右移动(1有效);BIT0始终为0。
*3.数据码1控制水平方向速度00~3FH
*4.数据码2控制垂直方向速度00~3FH
*5.校验码的值为对[(字节2 + 字节3+ 字节4 +字节5 + 字节6 )/100H]取模;
*6.校验码=MOD[(字节2 + 字节3+ 字节4 +字节5 + 字节6 )/100H]
除上述运动控制功能之外,提供一键回中、一键向下、巡航等模式功能。
云台伺服同时提供跟随模式、随动模式两种稳像模式,适用在无人机随动与定向两种工作模式需求。