应用场景
CycleGAN (Cycle Generative Adversarial Network) 是一种深度学习模型,主要用于图像风格迁移。它能够在没有成对训练数据的情况下,将图像从一种风格转换到另一种风格。应用场景包括:
- 图像风格迁移:将一张图像转换为另一种艺术风格,如将照片转换为梵高画作风格。
- 图像修复和增强:将模糊的图像修复为清晰的图像,或者将低分辨率图像转换为高分辨率图像。
- 医疗影像处理:在不同成像设备或成像条件下,将医学图像从一种模式转换为另一种模式,以便于医生进行诊断。
- 域适应:在计算机视觉任务中,通过将图像从一个领域迁移到另一个领域,提升模型在目标领域的性能。
模型介绍
CycleGAN 是一种循环对抗生成网络,通过两个生成器和两个判别器的对抗训练,实现图像风格的双向转换。生成器 G 将源域 X 的图像转换为目标域 Y 的图像,生成器 F 将目标域 Y 的图像转换回源域 X 的图像。判别器 DX 和 DY 用于分别区分源域和目标域的真实图像与生成图像。
模型实现
数据集
本案例使用 ImageNet 数据集的苹果和橘子部分,图像被统一缩放为 256x256 像素。训练集包括 996 张苹果图像和 1020 张橘子图像,测试集包括 266 张苹果图像和 248 张橘子图像。
数据下载和加载
from download import download
url = "https://mindspore-website.obs.cn-north-4.myhuaweicloud.com/notebook/models/application/CycleGAN_apple2orange.zip"
download(url, ".", kind="zip", replace=True)
from mindspore.dataset import MindDataset
name_mr = "./CycleGAN_apple2orange/apple2orange_train.mindrecord"
data = MindDataset(dataset_files=name_mr)
dataset = data.batch(1)
数据可视化
import numpy as np
import matplotlib.pyplot as plt
mean = 0.5 * 255
std = 0.5 * 255
plt.figure(figsize=(12, 5), dpi=60)
for i, data in enumerate(dataset.create_dict_iterator()):
if i < 5:
show_images_a = data["image_A"].asnumpy()
show_images_b = data["image_B"].asnumpy()
plt.subplot(2, 5, i+1)
show_images_a = (show_images_a[0] * std + mean).astype(np.uint8).transpose((1, 2, 0))
plt.imshow(show_images_a)
plt.axis("off")
plt.subplot(2, 5, i+6)
show_images_b = (show_images_b[0] * std + mean).astype(np.uint8).transpose((1, 2, 0))
plt.imshow(show_images_b)
plt.axis("off")
else:
break
plt.show()
构建生成器
生成器采用 ResNet 结构,包括 9 个残差块。
import mindspore.nn as nn
import mindspore.ops as ops
from mindspore.common.initializer import Normal
weight_init = Normal(sigma=0.02)
class ConvNormReLU(nn.Cell):
def __init__(self, input_channel, out_planes, kernel_size=4, stride=2, alpha=0.2, norm_mode='instance', pad_mode='CONSTANT', use_relu=True, padding=None, transpose=False):
super(ConvNormReLU, self).__init__()
norm = nn.BatchNorm2d(out_planes)
if norm_mode == 'instance':
norm = nn.BatchNorm2d(out_planes, affine=False)
has_bias = (norm_mode == 'instance')
if padding is None:
padding = (kernel_size - 1) // 2
if pad_mode == 'CONSTANT':
if transpose:
conv = nn.Conv2dTranspose(input_channel, out_planes, kernel_size, stride, pad_mode='same', has_bias=has_bias, weight_init=weight_init)
else:
conv = nn.Conv2d(input_channel, out_planes, kernel_size, stride, pad_mode='pad', has_bias=has_bias, padding=padding, weight_init=weight_init)
layers = [conv, norm]
else:
paddings = ((0, 0), (0, 0), (padding, padding), (padding, padding))
pad = nn.Pad(paddings=paddings, mode=pad_mode)
if transpose:
conv = nn.Conv2dTranspose(input_channel, out_planes, kernel_size, stride, pad_mode='pad', has_bias=has_bias, weight_init=weight_init)
else:
conv = nn.Conv2d(input_channel, out_planes, kernel_size, stride, pad_mode='pad', has_bias=has_bias, weight_init=weight_init)
layers = [pad, conv, norm]
if use_relu:
relu = nn.ReLU()
if alpha > 0:
relu = nn.LeakyReLU(alpha)
layers.append(relu)
self.features = nn.SequentialCell(layers)
def construct(self, x):
output = self.features(x)
return output
class ResidualBlock(nn.Cell):
def __init__(self, dim, norm_mode='instance', dropout=False, pad_mode="CONSTANT"):
super(ResidualBlock, self).__init__()
self.conv1 = ConvNormReLU(dim, dim, 3, 1, 0, norm_mode, pad_mode)
self.conv2 = ConvNormReLU(dim, dim, 3, 1, 0, norm_mode, pad_mode, use_relu=False)
self.dropout = dropout
if dropout:
self.dropout = nn.Dropout(p=0.5)
def construct(self, x):
out = self.conv1(x)
if self.dropout:
out = self.dropout(out)
out = self.conv2(out)
return x + out
class ResNetGenerator(nn.Cell):
def __init__(self, input_channel=3, output_channel=64, n_layers=9, alpha=0.2, norm_mode='instance', dropout=False, pad_mode="CONSTANT"):
super(ResNetGenerator, self).__init__()
self.conv_in = ConvNormReLU(input_channel, output_channel, 7, 1, alpha, norm_mode, pad_mode=pad_mode)
self.down_1 = ConvNormReLU(output_channel, output_channel * 2, 3, 2, alpha, norm_mode)
self.down_2 = ConvNormReLU(output_channel * 2, output_channel * 4, 3, 2, alpha, norm_mode)
layers = [ResidualBlock(output_channel * 4, norm_mode, dropout=dropout, pad_mode=pad_mode)] * n_layers
self.residuals = nn.SequentialCell(layers)
self.up_2 = ConvNormReLU(output_channel * 4, output_channel * 2, 3, 2, alpha, norm_mode, transpose=True)
self.up_1 = ConvNormReLU(output_channel * 2, output_channel, 3, 2, alpha, norm_mode, transpose=True)
if pad_mode == "CONSTANT":
self.conv_out = nn.Conv2d(output_channel, 3, kernel_size=7, stride=1, pad_mode='pad', padding=3, weight_init=weight_init)
else:
pad = nn.Pad(paddings=((0, 0), (0, 0), (3, 3), (3, 3)), mode=pad_mode)
conv = nn.Conv2d(output_channel, 3, kernel_size=7, stride=1, pad_mode='pad', weight_init=weight_init)
self.conv_out = nn.SequentialCell([pad, conv])
def construct(self, x):
x = self.conv_in(x)
x = self.down_1(x)
x = self.down_2(x)
x = self.residuals(x)
x = self.up_2(x)
x = self.up_1(x)
output = self.conv_out(x)
return ops.tanh(output)
# 实例化生成器
net_rg_a = ResNetGenerator()
net_rg_a.update_parameters_name('net_rg_a.')
net_rg_b = ResNetGenerator()
net_rg_b.update_parameters_name('net_rg_b.')
构建判别器
判别器使用 PatchGAN 模型,通过一系列的卷积层和激活函数层,输出图像为真实的概率。
class Discriminator(nn.Cell):
def __init__(self, input_channel=3, output_channel=64, n_layers=3, alpha=0.2, norm_mode='instance'):
super(Discriminator, self).__init__()
kernel_size = 4
layers = [
nn.Conv2d(input_channel, output_channel, kernel_size, 2, pad_mode='pad', padding=1, weight_init=weight_init),
nn.LeakyReLU(alpha)
]
nf_mult = output_channel
for i in range(1, n_layers):
nf_mult_prev = nf_mult
nf_mult = min(2 ** i, 8) * output_channel
layers.append(ConvNormReLU(nf_mult_prev, nf_mult, kernel_size, 2, alpha, norm_mode, padding=1))
nf_mult_prev = nf_mult
nf_mult = min(2 ** n_layers, 8) * output_channel
layers.append(ConvNormReLU(nf_mult_prev, nf_mult, kernel_size, 1, alpha, norm_mode, padding=1))
layers.append(nn.Conv2d(nf_mult, 1, kernel_size, 1, pad_mode='pad', padding=1, weight_init=weight_init))
self.features = nn.SequentialCell(layers)
def construct(self, x):
output = self.features(x)
return output
# 判别器初始化
net_d_a = Discriminator()
net_d_a.update_parameters_name('net_d_a.')
net_d_b = Discriminator()
net_d_b.update_parameters_name('net_d_b.')
优化器和损失函数
定义优化器和损失函数。
from mindspore import dtype
from mindspore import Tensor, save_checkpoint
from mindspore import value_and_grad
# 构建生成器,判别器优化器
optimizer_rg_a = nn.Adam(net_rg_a.trainable_params(), learning_rate=0.0002, beta1=0.5)
optimizer_rg_b = nn.Adam(net_rg_b.trainable_params(), learning_rate=0.0002, beta1=0.5)
optimizer_d_a = nn.Adam(net_d_a.trainable_params(), learning_rate=0.0002, beta1=0.5)
optimizer_d_b = nn.Adam(net_d_b.trainable_params(), learning_rate=0.0002, beta1=0.5)
# GAN网络损失函数
loss_fn = nn.MSELoss(reduction='mean')
l1_loss = nn.L1Loss("mean")
def gan_loss(predict, target):
target = ops.ones_like(predict) * target
loss = loss_fn(predict, target)
return loss
前向计算
定义模型前向计算和梯度计算。
# 前向计算
def generator(img_a, img_b):
fake_a = net_rg_b(img_b)
fake_b = net_rg_a(img_a)
rec_a = net_rg_b(fake_b)
rec_b = net_rg_a(fake_a)
identity_a = net_rg_b(img_a)
identity_b = net_rg_a(img_b)
return fake_a, fake_b, rec_a, rec_b, identity_a, identity_b
def generator_forward(img_a, img_b):
true = Tensor(True, dtype.bool_)
fake_a, fake_b, rec_a, rec_b, identity_a, identity_b = generator(img_a, img_b)
loss_g_a = gan_loss(net_d_b(fake_b), true)
loss_g_b = gan_loss(net_d_a(fake_a), true)
loss_c_a = l1_loss(rec_a, img_a)
loss_c_b = l1_loss(rec_b, img_b)
loss_idt_a = l1_loss(identity_a, img_a)
loss_idt_b = l1_loss(identity_b, img_b)
loss_g = loss_g_a + loss_g_b + loss_c_a + loss_c_b + loss_idt_a + loss_idt_b
return fake_a, fake_b, loss_g, loss_g_a, loss_g_b, loss_c_a, loss_c_b, loss_idt_a, loss_idt_b
def generator_forward_grad(img_a, img_b):
_, _, loss_g, _, _, _, _, _, _ = generator_forward(img_a, img_b)
return loss_g
def discriminator_forward(img_a, img_b, fake_a, fake_b):
false = Tensor(False, dtype.bool_)
true = Tensor(True, dtype.bool_)
d_fake_a = net_d_a(fake_a)
d_img_a = net_d_a(img_a)
d_fake_b = net_d_b(fake_b)
d_img_b = net_d_b(img_b)
loss_d_a = gan_loss(d_fake_a, false) + gan_loss(d_img_a, true)
loss_d_b = gan_loss(d_fake_b, false) + gan_loss(d_img_b, true)
loss_d = (loss_d_a + loss_d_b) * 0.5
return loss_d
def discriminator_forward_a(img_a, fake_a):
false = Tensor(False, dtype.bool_)
true = Tensor(True, dtype.bool_)
d_fake_a = net_d_a(fake_a)
d_img_a = net_d_a(img_a)
loss_d_a = gan_loss(d_fake_a, false) + gan_loss(d_img_a, true)
return loss_d_a
def discriminator_forward_b(img_b, fake_b):
false = Tensor(False, dtype.bool_)
true = Tensor(True, dtype.bool_)
d_fake_b = net_d_b(fake_b)
d_img_b = net_d_b(img_b)
loss_d_b = gan_loss(d_fake_b, false) + gan_loss(d_img_b, true)
return loss_d_b
# 保留了一个图像缓冲区,用来存储之前创建的50个图像
pool_size = 50
def image_pool(images):
num_imgs = 0
image1 = []
if isinstance(images, Tensor):
images = images.asnumpy()
return_images = []
for image in images:
if num_imgs < pool_size:
num_imgs = num_imgs + 1
image1.append(image)
return_images.append(image)
else:
if random.uniform(0, 1) > 0.5:
random_id = random.randint(0, pool_size - 1)
tmp = image1[random_id].copy()
image1[random_id] = image
return_images.append(tmp)
else:
return_images.append(image)
output = Tensor(return_images, ms.float32)
if output.ndim != 4:
raise ValueError("img should be 4d, but get shape {}".format(output.shape))
return output
计算梯度和反向传播
# 实例化求梯度的方法
grad_g_a = value_and_grad(generator_forward_grad, None, net_rg_a.trainable_params())
grad_g_b = value_and_grad(generator_forward_grad, None, net_rg_b.trainable_params())
grad_d_a = value_and_grad(discriminator_forward_a, None, net_d_a.trainable_params())
grad_d_b = value_and_grad(discriminator_forward_b, None, net_d_b.trainable_params())
# 计算生成器的梯度,反向传播更新参数
def train_step_g(img_a, img_b):
net_d_a.set_grad(False)
net_d_b.set_grad(False)
fake_a, fake_b, lg, lga, lgb, lca, lcb, lia, lib = generator_forward(img_a, img_b)
_, grads_g_a = grad_g_a(img_a, img_b)
_, grads_g_b = grad_g_b(img_a, img_b)
optimizer_rg_a(grads_g_a)
optimizer_rg_b(grads_g_b)
return fake_a, fake_b, lg, lga, lgb, lca, lcb, lia, lib
# 计算判别器的梯度,反向传播更新参数
def train_step_d(img_a, img_b, fake_a, fake_b):
net_d_a.set_grad(True)
net_d_b.set_grad(True)
loss_d_a, grads_d_a = grad_d_a(img_a, fake_a)
loss_d_b, grads_d_b = grad_d_b(img_b, fake_b)
loss_d = (loss_d_a + loss_d_b) * 0.5
optimizer_d_a(grads_d_a)
optimizer_d_b(grads_d_b)
return loss_d
模型训练
import os
import time
import random
import numpy as np
from PIL import Image
from mindspore import Tensor, save_checkpoint
# 由于时间原因,epochs设置为1,可根据需求进行调整
epochs = 1
save_step_num = 80
save_checkpoint_epochs = 1
save_ckpt_dir = './train_ckpt_outputs/'
print('Start training!')
for epoch in range(epochs):
g_loss = []
d_loss = []
start_time_e = time.time()
for step, data in enumerate(dataset.create_dict_iterator()):
start_time_s = time.time()
img_a = data["image_A"]
img_b = data["image_B"]
res_g = train_step_g(img_a, img_b)
fake_a = res_g[0]
fake_b = res_g[1]
res_d = train_step_d(img_a, img_b, image_pool(fake_a), image_pool(fake_b))
loss_d = float(res_d.asnumpy())
step_time = time.time() - start_time_s
res = []
for item in res_g[2:]:
res.append(float(item.asnumpy()))
g_loss.append(res[0])
d_loss.append(loss_d)
if step % save_step_num == 0:
print(f"Epoch:[{int(epoch + 1):>3d}/{int(epochs):>3d}], "
f"step:[{int(step):>4d}/{int(datasize):>4d}], "
f"time:{step_time:>3f}s,\n"
f"loss_g:{res[0]:.2f}, loss_d:{loss_d:.2f}, "
f"loss_g_a: {res[1]:.2f}, loss_g_b: {res[2]:.2f}, "
f"loss_c_a: {res[3]:.2f}, loss_c_b: {res[4]:.2f}, "
f"loss_idt_a: {res[5]:.2f}, loss_idt_b: {res[6]:.2f}")
epoch_cost = time.time() - start_time_e
per_step_time = epoch_cost / datasize
mean_loss_d, mean_loss_g = sum(d_loss) / datasize, sum(g_loss) / datasize
print(f"Epoch:[{int(epoch + 1):>3d}/{int(epochs):>3d}], "
f"epoch time:{epoch_cost:.2f}s, per step time:{per_step_time:.2f}, "
f"mean_g_loss:{mean_loss_g:.2f}, mean_d_loss:{mean_loss_d :.2f}")
if epoch % save_checkpoint_epochs == 0:
os.makedirs(save_ckpt_dir, exist_ok=True)
save_checkpoint(net_rg_a, os.path.join(save_ckpt_dir, f"g_a_{epoch}.ckpt"))
save_checkpoint(net_rg_b, os.path.join(save_ckpt_dir, f"g_b_{epoch}.ckpt"))
save_checkpoint(net_d_a, os.path.join(save_ckpt_dir, f"d_a_{epoch}.ckpt"))
save_checkpoint(net_d_b, os.path.join(save_ckpt_dir, f"d_b_{epoch}.ckpt"))
print('End of training!')
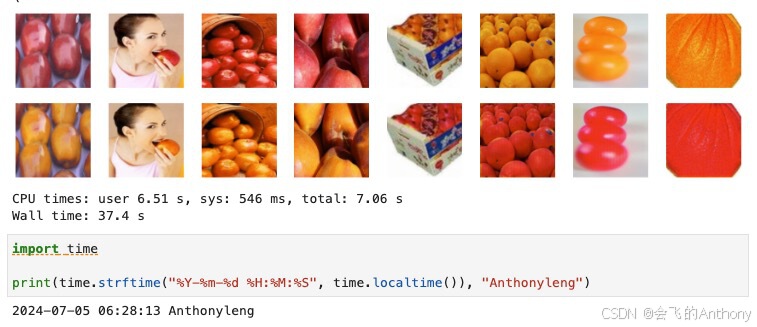
模型推理
加载训练好的生成器网络模型参数文件,对原图进行风格迁移,结果中第一行为原图,第二行为对应生成的结果图。
import os
from PIL import Image
import mindspore.dataset as ds
import mindspore.dataset.vision as vision
from mindspore import load_checkpoint, load_param_into_net
# 加载权重文件
def load_ckpt(net, ckpt_dir):
param_GA = load_checkpoint(ckpt_dir)
load_param_into_net(net, param_GA)
g_a_ckpt = './CycleGAN_apple2orange/ckpt/g_a.ckpt'
g_b_ckpt = './CycleGAN_apple2orange/ckpt/g_b.ckpt'
load_ckpt(net_rg_a, g_a_ckpt)
load_ckpt(net_rg_b, g_b_ckpt)
# 图片推理
fig = plt.figure(figsize=(11, 2.5), dpi=100)
def eval_data(dir_path, net, a):
def read_img():
for dir in os.listdir(dir_path):
path = os.path.join(dir_path, dir)
img = Image.open(path).convert('RGB')
yield img, dir
dataset = ds.GeneratorDataset(read_img, column_names=["image", "image_name"])
trans = [vision.Resize((256, 256)), vision.Normalize(mean=[0.5 * 255] * 3, std=[0.5 * 255] * 3), vision.HWC2CHW()]
dataset = dataset.map(operations=trans, input_columns=["image"])
dataset = dataset.batch(1)
for i, data in enumerate(dataset.create_dict_iterator()):
img = data["image"]
fake = net(img)
fake = (fake[0] * 0.5 * 255 + 0.5 * 255).astype(np.uint8).transpose((1, 2, 0))
img = (img[0] * 0.5 * 255 + 0.5 * 255).astype(np.uint8).transpose((1, 2, 0))
fig.add_subplot(2, 8, i+1+a)
plt.axis("off")
plt.imshow(img.asnumpy())
fig.add_subplot(2, 8, i+9+a)
plt.axis("off")
plt.imshow(fake.asnumpy())
eval_data('./CycleGAN_apple2orange/predict/apple', net_rg_a, 0)
eval_data('./CycleGAN_apple2orange/predict/orange', net_rg_b, 4)
plt.show()
结果
学习心得:通过本次学习和实践,我们深入了解了CycleGAN的模型架构和其在图像风格迁移中的应用。CycleGAN的核心在于其循环一致损失函数,通过不需要成对的数据实现图像风格的双向转换。模型实现过程中,我们不仅构建了生成器和判别器,还设计了优化器和损失函数,并进行了模型的训练和推理。整个过程增强了我们对深度学习框架的理解,并提升了我们的编程能力和解决实际问题的能力。
参考文献
[1] I. Goodfellow. NIPS 2016 tutorial: Generative ad-versarial networks. arXiv preprint arXiv:1701.00160,2016. 2, 4, 5
[2] A. Shrivastava, T. Pfister, O. Tuzel, J. Susskind, W. Wang, R. Webb. Learning from simulated and unsupervised images through adversarial training. In CVPR, 2017. 3, 5, 6, 7
如果你觉得这篇博文对你有帮助,请点赞、收藏、关注我,并且可以打赏支持我!
欢迎关注我的后续博文,我将分享更多关于人工智能、自然语言处理和计算机视觉的精彩内容。
谢谢大家的支持!