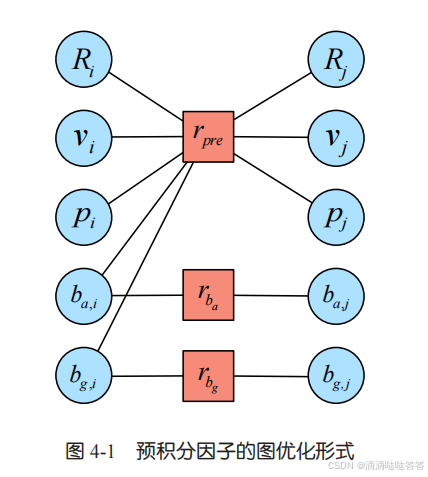
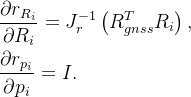
前言:预积分图优化的结构
1 预积分的图优化顶点
这里使用 《自动驾驶与机器人中的SLAM技术》ch4:预积分学 中提到的散装的形式来实现预积分的顶点部分,所以每个状态被分为位姿(

下文中提到的顶点的维度为 优化变量的维度。
1.1 旋转在前,平移在后的位姿顶点(6维)
位姿顶点的顺序为旋转在前,平移在后,雅可比矩阵的顺序要与之对应。
/**
* 旋转在前,平移在后的的SO3+t类型pose,6自由度,存储时伪装为g2o::VertexSE3,供g2o_viewer查看
*/
class VertexPose : public g2o::BaseVertex<6, SE3> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
VertexPose() {}
// 读写函数是为了保存顶点信息到 .g2o 文件中的,该文件可使用 g2o_viewer 可视化
bool read(std::istream& is) override {
double data[7];
for (int i = 0; i < 7; i++) {
is >> data[i];
}
setEstimate(SE3(Quatd(data[6], data[3], data[4], data[5]), Vec3d(data[0], data[1], data[2])));
return true;
}
bool write(std::ostream& os) const override {
os << "VERTEX_SE3:QUAT ";
os << id() << " ";
Quatd q = _estimate.unit_quaternion();
os << _estimate.translation().transpose() << " ";
os << q.coeffs()[0] << " " << q.coeffs()[1] << " " << q.coeffs()[2] << " " << q.coeffs()[3] << std::endl;
return true;
}
// 重置。这里未实现该函数的功能
virtual void setToOriginImpl() {}
// 更新
virtual void oplusImpl(const double* update_) {
// Eigen::Map<const Vec3d>(&update_[0]) :使用 &update_[0] 获取指向数组中第 1 个元素的地址,从该地址开始,将 update_ 数组连续的 3 个元素映射为一个 Eigen::Vector3d 对象
// Eigen::Map<const Vec3d>(&update_[3]) :使用 &update_[3] 获取指向数组中第 4 个元素的地址,从该地址开始,将 update_ 数组连续的 3 个元素映射为一个 Eigen::Vector3d 对象
// Eigen::Map: 这是一个模板类,用于将现有的内存块映射为 Eigen 对象。这种映射是零开销的,因为它不会复制数据,而是直接使用提供的内存。
_estimate.so3() = _estimate.so3() * SO3::exp(Eigen::Map<const Vec3d>(&update_[0])); // 旋转部分,右乘更新
_estimate.translation() += Eigen::Map<const Vec3d>(&update_[3]); // 平移部分
updateCache();
}
};1.2 速度顶点(3维)
/**
* 速度顶点,单纯的Vec3d
*/
class VertexVelocity : public g2o::BaseVertex<3, Vec3d> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
VertexVelocity() {}
virtual bool read(std::istream& is) { return false; }
virtual bool write(std::ostream& os) const { return false; }
virtual void setToOriginImpl() { _estimate.setZero(); }
virtual void oplusImpl(const double* update_) { _estimate += Eigen::Map<const Vec3d>(update_); }
};
1.3 陀螺仪和加速度计零偏顶点(3维)
陀螺仪零偏顶点和加速度计零偏顶点均继承自速度顶点。
/**
* 陀螺零偏顶点,亦为Vec3d,从速度顶点继承
*/
class VertexGyroBias : public VertexVelocity {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
VertexGyroBias() {}
};
/**
* 加计零偏顶点,Vec3d,亦从速度顶点继承
*/
class VertexAccBias : public VertexVelocity {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
VertexAccBias() {}
};2 预积分的图优化边
在基于预积分和图优化的 GINS 系统中,边主要有以下几种:
- 1. 预积分的边,约束上一时刻的 15 维状态与下一时刻的旋转、平移、速度;
- 2. 零偏随机游走的边,共两种,连接两个时刻的零偏状态;
- 3. GNSS 的观测边。因为我们使用六自由度观测,所以它关联单个时刻的位姿;
- 4. 先验信息,刻画上一时刻的状态分布,关联下一时刻的 15 维状态;
- 5. 轮速计的观测边。关联上一时刻的速度顶点。
下文中提到的边的维度为 观测值维度 。
2.1 预积分边(9维多元边)
注意:预积分边需要从外部传入 预积分对象、重力矢量和权重因子(为信息矩阵添加的乘积因子)。其中需要从预积分类中获取 整体预积分时间、预积分的协方差矩阵(其逆乘以权重因子作为信息矩阵)、预积分陀螺仪零偏(计算 

其中残差的定义及残差对状态变量的雅可比矩阵见 《自动驾驶与机器人中的SLAM技术》ch4:预积分学 中的推导。
计算 预积分残差对状态变量的雅可比矩阵 的结构如下图所示:
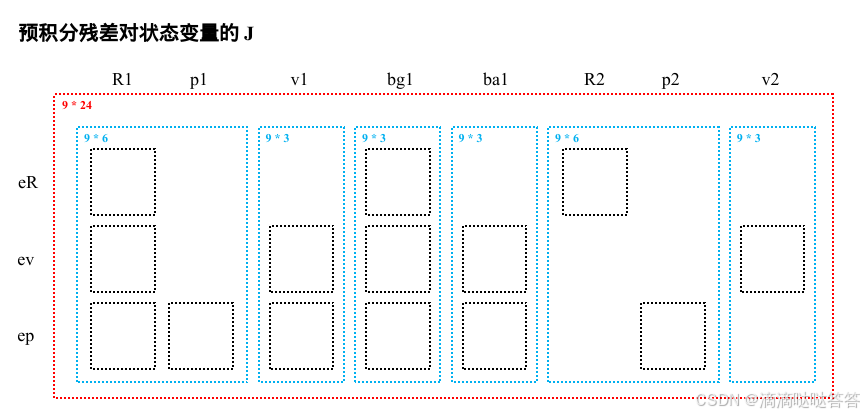
代码实现如下:
/// 与预积分相关的vertex, edge
/**
* 预积分边(多元边)
* 连接6个顶点:上一帧的pose, v, bg, ba,下一帧的pose, v
* 观测量为9维,即预积分残差, 顺序:R, v, p
* information从预积分类中获取,构造函数中计算
* 旋转在前,平移在后
*/
class EdgeInertial : public g2o::BaseMultiEdge<9, Vec9d> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
/**
* 构造函数中需要指定预积分类对象
* @param preinteg 预积分对象指针
* @param gravity 重力矢量
* @param weight 权重。为信息矩阵添加的乘积因子
*/
EdgeInertial(std::shared_ptr<IMUPreintegration> preinteg, const Vec3d& gravity, double weight = 1.0);
bool read(std::istream& is) override { return false; }
bool write(std::ostream& os) const override { return false; }
// 计算边的误差,即预积分残差
void computeError() override;
// 计算雅可比矩阵
void linearizeOplus() override;
// 计算 Hessian 矩阵
Eigen::Matrix<double, 24, 24> GetHessian() {
linearizeOplus();
Eigen::Matrix<double, 9, 24> J;
J.block<9, 6>(0, 0) = _jacobianOplus[0];
J.block<9, 3>(0, 6) = _jacobianOplus[1];
J.block<9, 3>(0, 9) = _jacobianOplus[2];
J.block<9, 3>(0, 12) = _jacobianOplus[3];
J.block<9, 6>(0, 15) = _jacobianOplus[4];
J.block<9, 3>(0, 21) = _jacobianOplus[5];
return J.transpose() * information() * J;
}
private:
const double dt_;
std::shared_ptr<IMUPreintegration> preint_ = nullptr;
Vec3d grav_;
};EdgeInertial::EdgeInertial(std::shared_ptr<IMUPreintegration> preinteg, const Vec3d& gravity, double weight)
: preint_(preinteg), dt_(preinteg->dt_) {
resize(6); // 6个关联顶点
grav_ = gravity;
setInformation(preinteg->cov_.inverse() * weight);
}
void EdgeInertial::computeError() {
auto* p1 = dynamic_cast<const VertexPose*>(_vertices[0]);
auto* v1 = dynamic_cast<const VertexVelocity*>(_vertices[1]);
auto* bg1 = dynamic_cast<const VertexGyroBias*>(_vertices[2]);
auto* ba1 = dynamic_cast<const VertexAccBias*>(_vertices[3]);
auto* p2 = dynamic_cast<const VertexPose*>(_vertices[4]);
auto* v2 = dynamic_cast<const VertexVelocity*>(_vertices[5]);
Vec3d bg = bg1->estimate();
Vec3d ba = ba1->estimate();
// 零偏的更新(假设预积分的测量值是随零偏线性变化的,当零偏更新时,在原先预积分测量值的基础上进行修正得到新的预积分测量值)
const SO3 dR = preint_->GetDeltaRotation(bg);
const Vec3d dv = preint_->GetDeltaVelocity(bg, ba);
const Vec3d dp = preint_->GetDeltaPosition(bg, ba);
/// 预积分误差项 p112 (4.41)
// 预积分残差项
const Vec3d er = (dR.inverse() * p1->estimate().so3().inverse() * p2->estimate().so3()).log();
Mat3d RiT = p1->estimate().so3().inverse().matrix();
const Vec3d ev = RiT * (v2->estimate() - v1->estimate() - grav_ * dt_) - dv;
const Vec3d ep = RiT * (p2->estimate().translation() - p1->estimate().translation() - v1->estimate() * dt_ -
grav_ * dt_ * dt_ / 2) -
dp;
_error << er, ev, ep;
}
void EdgeInertial::linearizeOplus() {
// 在 setVertex() 函数中设置 void setVertex(size_t i, Vertex* v) {_vertices[i]=v;}
// 顺序为 v0_pose、v0_vel、v0_bg、v0_ba、v1_pose、v1_vel(这里体现了 旋转在前,平移在后)
auto* p1 = dynamic_cast<const VertexPose*>(_vertices[0]);
auto* v1 = dynamic_cast<const VertexVelocity*>(_vertices[1]);
auto* bg1 = dynamic_cast<const VertexGyroBias*>(_vertices[2]);
auto* ba1 = dynamic_cast<const VertexAccBias*>(_vertices[3]);
auto* p2 = dynamic_cast<const VertexPose*>(_vertices[4]);
auto* v2 = dynamic_cast<const VertexVelocity*>(_vertices[5]);
Vec3d bg = bg1->estimate();
Vec3d ba = ba1->estimate();
Vec3d dbg = bg - preint_->bg_;
// 一些中间符号
const SO3 R1 = p1->estimate().so3();
const SO3 R1T = R1.inverse();
const SO3 R2 = p2->estimate().so3();
auto dR_dbg = preint_->dR_dbg_;
auto dv_dbg = preint_->dV_dbg_;
auto dp_dbg = preint_->dP_dbg_;
auto dv_dba = preint_->dV_dba_;
auto dp_dba = preint_->dP_dba_;
// 估计值
Vec3d vi = v1->estimate();
Vec3d vj = v2->estimate();
Vec3d pi = p1->estimate().translation();
Vec3d pj = p2->estimate().translation();
const SO3 dR = preint_->GetDeltaRotation(bg);
const SO3 eR = SO3(dR).inverse() * R1T * R2;
const Vec3d er = eR.log();
// 修复 bug
const Mat3d invJr = SO3::jr_inv(er);
/// 雅可比矩阵
/// 注意有3个index, 顶点的,自己误差的,顶点内部变量的
/// 变量顺序:pose1(R1,p1), v1, bg1, ba1, pose2(R2,p2), v2
/// 残差顺序:eR, ev, ep,残差顺序为行(row),变量顺序为列(col)
// | R1 | p1 | v1 | bg1 | ba1 | R2 | p2 | v2 |
// vert | 0 | 1 | 2 | 3 | 4 | 5 |
// col | 0 3 | 0 | 0 | 0 | 0 3 | 0 |
// row
// eR 0 |
// ev 3 |
// ep 6 |
/// 残差对R1, 9x3
_jacobianOplus[0].setZero();
// dR/dR1, p113 (4.42)
_jacobianOplus[0].block<3, 3>(0, 0) = -invJr * (R2.inverse() * R1).matrix();
// dv/dR1, p115 (4.47)
_jacobianOplus[0].block<3, 3>(3, 0) = SO3::hat(R1T * (vj - vi - grav_ * dt_));
// dp/dR1, p115 (4.48d)
_jacobianOplus[0].block<3, 3>(6, 0) = SO3::hat(R1T * (pj - pi - vi * dt_ - 0.5 * grav_ * dt_ * dt_));
/// 残差对p1, 9x3
// dp/dp1, p115 (4.48a)
_jacobianOplus[0].block<3, 3>(6, 3) = -R1T.matrix();
/// 残差对v1, 9x3
_jacobianOplus[1].setZero();
// dv/dv1, p114 (4.46a)
_jacobianOplus[1].block<3, 3>(3, 0) = -R1T.matrix();
// dp/dv1, p115 (4.48c)
_jacobianOplus[1].block<3, 3>(6, 0) = -R1T.matrix() * dt_;
/// 残差对bg1
_jacobianOplus[2].setZero();
// dR/dbg1, p114 (4.45)
_jacobianOplus[2].block<3, 3>(0, 0) = -invJr * eR.inverse().matrix() * SO3::jr((dR_dbg * dbg).eval()) * dR_dbg;
// dv/dbg1 p111 (4.38)前添加负号
_jacobianOplus[2].block<3, 3>(3, 0) = -dv_dbg;
// dp/dbg1 p111 (4.38)前添加负号
_jacobianOplus[2].block<3, 3>(6, 0) = -dp_dbg;
/// 残差对ba1
_jacobianOplus[3].setZero();
// dv/dba1 p111 (4.38)前添加负号
_jacobianOplus[3].block<3, 3>(3, 0) = -dv_dba;
// dp/dba1 p111 (4.38)前添加负号
_jacobianOplus[3].block<3, 3>(6, 0) = -dp_dba;
/// 残差对pose2
_jacobianOplus[4].setZero();
// dr/dr2, p114 (4.43)
_jacobianOplus[4].block<3, 3>(0, 0) = invJr;
// dp/dp2, p115 (4.48b)
_jacobianOplus[4].block<3, 3>(6, 3) = R1T.matrix();
/// 残差对v2
_jacobianOplus[5].setZero();
// dv/dv2, p114 (4,46b)
_jacobianOplus[5].block<3, 3>(3, 0) = R1T.matrix(); // OK
}2.2 零偏随机游走边(3维双元边)
2.2.1 陀螺仪随机游走边
残差定义:

残差对状态变量的雅可比矩阵:
/**
* 陀螺仪随机游走边(双元边)
*/
class EdgeGyroRW : public g2o::BaseBinaryEdge<3, Vec3d, VertexGyroBias, VertexGyroBias> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
EdgeGyroRW() {}
virtual bool read(std::istream& is) { return false; }
virtual bool write(std::ostream& os) const { return false; }
void computeError() {
// 在 setVertex() 函数中设置 void setVertex(size_t i, Vertex* v) {_vertices[i]=v;}
// 顺序为 v0_bg、v1_bg
const auto* VG1 = dynamic_cast<const VertexGyroBias*>(_vertices[0]);
const auto* VG2 = dynamic_cast<const VertexGyroBias*>(_vertices[1]);
_error = VG2->estimate() - VG1->estimate();
}
virtual void linearizeOplus() {
// 残差对 bg1, 3x3
_jacobianOplusXi = -Mat3d::Identity();
// 残差对 bg2, 3x3
_jacobianOplusXj.setIdentity();
}
Eigen::Matrix<double, 6, 6> GetHessian() {
linearizeOplus();
Eigen::Matrix<double, 3, 6> J;
J.block<3, 3>(0, 0) = _jacobianOplusXi;
J.block<3, 3>(0, 3) = _jacobianOplusXj;
return J.transpose() * information() * J;
}
};2.2.2 加速度计随机游走边
残差定义:

残差对状态变量的雅可比矩阵:
/**
* 加速度计随机游走边(双元边)
*/
class EdgeAccRW : public g2o::BaseBinaryEdge<3, Vec3d, VertexAccBias, VertexAccBias> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
EdgeAccRW() {}
virtual bool read(std::istream& is) { return false; }
virtual bool write(std::ostream& os) const { return false; }
void computeError() {
// 在 setVertex() 函数中设置 void setVertex(size_t i, Vertex* v) {_vertices[i]=v;}
// 顺序为 v0_ba、v1_ba
const auto* VA1 = dynamic_cast<const VertexAccBias*>(_vertices[0]);
const auto* VA2 = dynamic_cast<const VertexAccBias*>(_vertices[1]);
_error = VA2->estimate() - VA1->estimate();
}
virtual void linearizeOplus() {
// 残差对 ba1, 3x3
_jacobianOplusXi = -Mat3d::Identity();
// 残差对 ba2, 3x3
_jacobianOplusXj.setIdentity();
}
Eigen::Matrix<double, 6, 6> GetHessian() {
linearizeOplus();
Eigen::Matrix<double, 3, 6> J;
J.block<3, 3>(0, 0) = _jacobianOplusXi;
J.block<3, 3>(0, 3) = _jacobianOplusXj;
return J.transpose() * information() * J;
}
};2.3 GNSS 观测边(单边)
GNSS 方案分为双天线方案和单天线方案。
2.3.1 双天线方案(6维 旋转+位移)
注意:双天线 GNSS 边需要从外部传入 GNSS 测量值(
残差定义:
残差对状态变量的雅可比矩阵:

/**
* 6 自由度的GNSS
* 误差的旋转在前,平移在后
*/
class EdgeGNSS : public g2o::BaseUnaryEdge<6, SE3, VertexPose> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
EdgeGNSS() = default;
EdgeGNSS(VertexPose* v, const SE3& obs) {
setVertex(0, v);
setMeasurement(obs);
}
// 这里使用的是 bag包或者 .txt数据,其中的 GNSS 数据已经被转换到车体坐标系下了,是直接对 R,p 的观测
void computeError() override {
// 在 setVertex() 函数中设置 void setVertex(size_t i, Vertex* v) {_vertices[i]=v;}
// 顺序为 p_gnss_0 或者 p_gnss_1
VertexPose* v = (VertexPose*)_vertices[0];
_error.head<3>() = (_measurement.so3().inverse() * v->estimate().so3()).log();
_error.tail<3>() = v->estimate().translation() - _measurement.translation();
};
void linearizeOplus() override {
VertexPose* v = (VertexPose*)_vertices[0];
// jacobian 6x6
_jacobianOplusXi.setZero();
_jacobianOplusXi.block<3, 3>(0, 0) = (_measurement.so3().inverse() * v->estimate().so3()).jr_inv(); // dR/dR
_jacobianOplusXi.block<3, 3>(3, 3) = Mat3d::Identity(); // dp/dp
}
Mat6d GetHessian() {
linearizeOplus();
return _jacobianOplusXi.transpose() * information() * _jacobianOplusXi;
}
virtual bool read(std::istream& in) { return true; }
virtual bool write(std::ostream& out) const { return true; }
private:
};2.3.2 单天线方案(3维 位移)
注意:单天线 GNSS 边需要从外部传入 传感器外参(


残差定义:

残差对状态变量的雅可比矩阵:

/**
* 只有平移的GNSS
* 此时需要提供RTK外参 TBG,才能正确施加约束
*/
class EdgeGNSSTransOnly : public g2o::BaseUnaryEdge<3, Vec3d, VertexPose> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
/**
* 指定位姿顶点、RTK观测 t_WG、外参TGB
* @param v
* @param obs
*/
EdgeGNSSTransOnly(VertexPose* v, const Vec3d& obs, const SE3& TBG) : TBG_(TBG) {
setVertex(0, v);
setMeasurement(obs);
}
void computeError() override {
// 在 setVertex() 函数中设置 void setVertex(size_t i, Vertex* v) {_vertices[i]=v;}
// 顺序为 p_gnss_0 或者 p_gnss_1
VertexPose* v = (VertexPose*)_vertices[0];
// RTK 读数为 T_WG
_error = (v->estimate() * TBG_).translation() - _measurement;
};
// 可以由用户提供雅可比矩阵的解析解;或者省略 linearizeOplus() 函数使用 g2o 默认的数值方式自动计算雅可比矩阵的数值解,但效率较低并且可能会引入误差
// void linearizeOplus() override {
// VertexPose* v = (VertexPose*)_vertices[0];
// // jacobian 6x6
// _jacobianOplusXi.setZero();
// _jacobianOplusXi.block<3, 3>(0, 0) = (_measurement.so3().inverse() * v->estimate().so3()).jr_inv(); // dR/dR
// _jacobianOplusXi.block<3, 3>(3, 3) = Mat3d::Identity(); // dp/dp
// }
virtual bool read(std::istream& in) { return true; }
virtual bool write(std::ostream& out) const { return true; }
private:
SE3 TBG_;
};2.4 先验因子边(15维多元边)
注意:先验信息边需要从外部传入 上一轮优化(



残差定义:

残差对状态变量的雅可比矩阵:

/**
* 先验信息边(多元变)
* 对上一帧IMU pvq bias的先验
* info 由外部指定,通过时间窗口边缘化给出
*
* 顶点顺序:pose, v, bg, ba
* 残差顺序:R, p, v, bg, ba,15维
* 残差的旋转在前,平移在后
*/
class EdgePriorPoseNavState : public g2o::BaseMultiEdge<15, Vec15d> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
EdgePriorPoseNavState(const NavStated& state, const Mat15d& info);
virtual bool read(std::istream& is) { return false; }
virtual bool write(std::ostream& os) const { return false; }
void computeError();
virtual void linearizeOplus();
Eigen::Matrix<double, 15, 15> GetHessian() {
linearizeOplus();
Eigen::Matrix<double, 15, 15> J;
J.block<15, 6>(0, 0) = _jacobianOplus[0];
J.block<15, 3>(0, 6) = _jacobianOplus[1];
J.block<15, 3>(0, 9) = _jacobianOplus[2];
J.block<15, 3>(0, 12) = _jacobianOplus[3];
return J.transpose() * information() * J;
}
NavStated state_;
};EdgePriorPoseNavState::EdgePriorPoseNavState(const NavStated& state, const Mat15d& info) {
resize(4);
state_ = state;
setInformation(info);
}
void EdgePriorPoseNavState::computeError() {
// 在 setVertex() 函数中设置 void setVertex(size_t i, Vertex* v) {_vertices[i]=v;}
// 顺序为 v0_pose、v0_vel、v0_bg、v0_ba
auto* vp = dynamic_cast<const VertexPose*>(_vertices[0]);
auto* vv = dynamic_cast<const VertexVelocity*>(_vertices[1]);
auto* vg = dynamic_cast<const VertexGyroBias*>(_vertices[2]);
auto* va = dynamic_cast<const VertexAccBias*>(_vertices[3]);
const Vec3d er = SO3(state_.R_.matrix().transpose() * vp->estimate().so3().matrix()).log();
const Vec3d ep = vp->estimate().translation() - state_.p_;
const Vec3d ev = vv->estimate() - state_.v_;
const Vec3d ebg = vg->estimate() - state_.bg_;
const Vec3d eba = va->estimate() - state_.ba_;
_error << er, ep, ev, ebg, eba;
}
void EdgePriorPoseNavState::linearizeOplus() {
const auto* vp = dynamic_cast<const VertexPose*>(_vertices[0]);
const Vec3d er = SO3(state_.R_.matrix().transpose() * vp->estimate().so3().matrix()).log();
// | R1 | p1 | v1 | bg1 | ba1 |
// vert | 0 | 1 | 2 | 3 |
// col | 0 3 | 0 | 0 | 0 |
// row
// eR 0 |
// ep 3 |
// ev 6 |
// ebg 9 |
// eba 12|
/// 注意有3个index, 顶点的,自己误差的,顶点内部变量的
_jacobianOplus[0].setZero();
_jacobianOplus[0].block<3, 3>(0, 0) = SO3::jr_inv(er); // dr/dr
_jacobianOplus[0].block<3, 3>(3, 3) = Mat3d::Identity(); // dp/dp
_jacobianOplus[1].setZero();
_jacobianOplus[1].block<3, 3>(6, 0) = Mat3d::Identity(); // dv/dv
_jacobianOplus[2].setZero();
_jacobianOplus[2].block<3, 3>(9, 0) = Mat3d::Identity(); // dbg/dbg
_jacobianOplus[3].setZero();
_jacobianOplus[3].block<3, 3>(12, 0) = Mat3d::Identity(); // dba/dba
}2.5 轮速计边(3维单元边)
注意:轮速计边需要从外部传入 经过转换后的 

残差定义:

残差对状态变量的雅可比矩阵:

/**
* 3维 轮速计观测边
* 轮速观测世界速度在自车坐标系下矢量, 3维情况下假设自车不会有y和z方向速度
*/
class EdgeEncoder3D : public g2o::BaseUnaryEdge<3, Vec3d, VertexVelocity> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
EdgeEncoder3D() = default;
/**
* 构造函数需要知道世界系下速度
* @param v0
* @param speed
*/
EdgeEncoder3D(VertexVelocity* v0, const Vec3d& speed) {
setVertex(0, v0);
setMeasurement(speed);
}
void computeError() override {
VertexVelocity* v0 = (VertexVelocity*)_vertices[0];
_error = v0->estimate() - _measurement;
}
void linearizeOplus() override { _jacobianOplusXi.setIdentity(); }
virtual bool read(std::istream& in) { return true; }
virtual bool write(std::ostream& out) const { return true; }
};3 实现基于预积分和图优化的 GINS
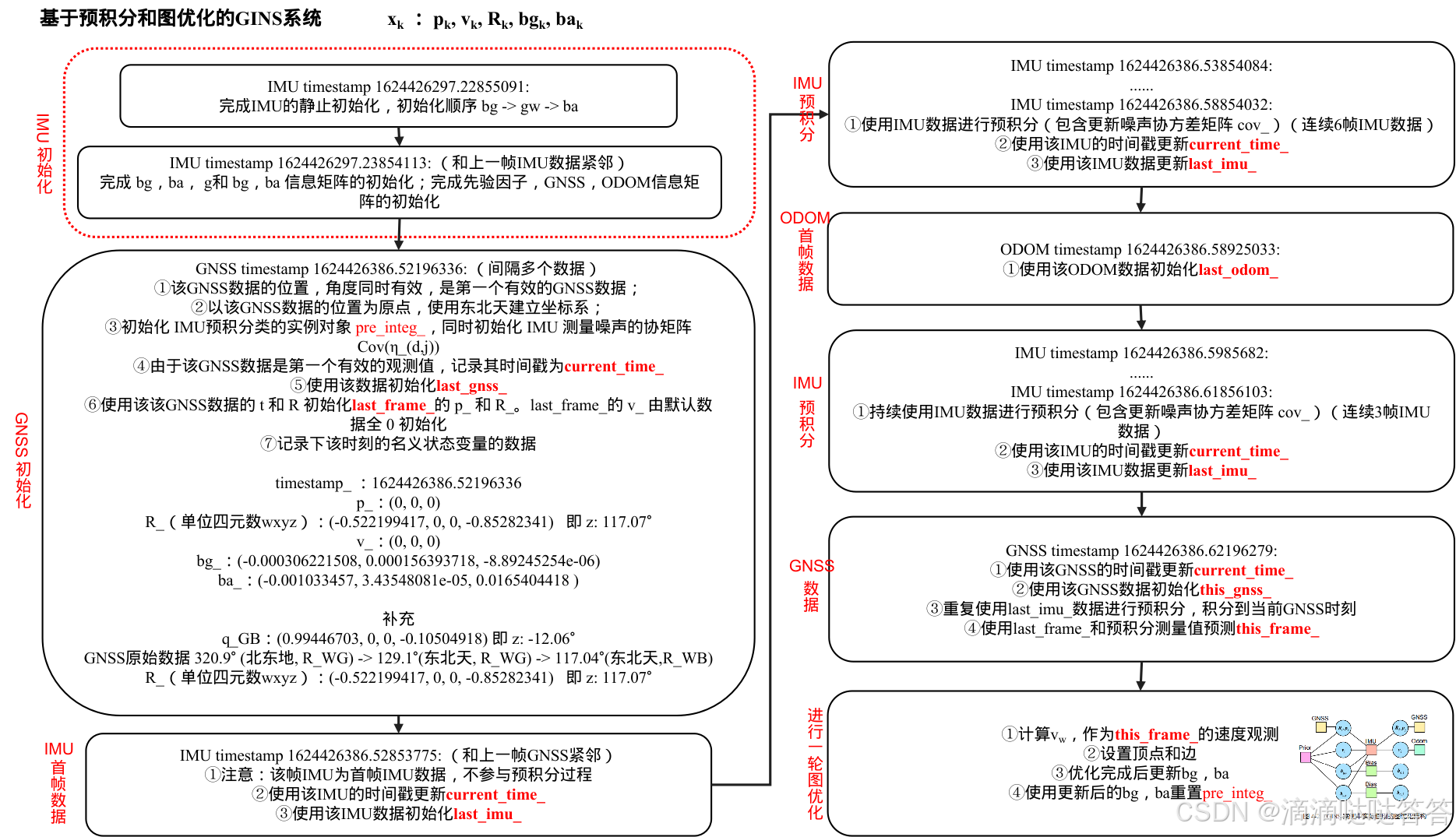
最后我们利用前面定义的图优化顶点和边,来实现一个类似于 ESKF 的 GNSS 惯导融合定位。读者也可借这个实验来更深入地考察图优化与滤波器之间的异同。这个基于图优化的 GINS 系统逻辑和 ESKF 大体相同,一样需要静态的 IMU 初始化来确定初始的 IMU 零偏与重力方向。我们把这些逻辑处理放到一个单独的类中,重点关注这个图优化模型是如何构建的。它的基本逻辑如下:
- 1. 使用 IMU 静止初始化算法来获取初始的零偏(
)和重力方向(
),随后初始化各类信息矩阵(
、
、GNSS、ODOM、先验因子的信息矩阵),然后使用首个带姿态的 GNSS 数据来获取初始位置与姿态,初始速度为 0,初始的零偏等于预积分类中的零偏,即 IMU 静止初始化得到的零偏。如果 IMU 和 GNSS 都有效,就开始进行预测和优化过程。
- 2. 当 IMU 数据到达时,使用预积分器来累计 IMU 的积分信息。
- 3. 当 ODOM 数据到达时,我们将它记录为最近时刻的速度观测并保留它的读数。
- 4. 在 GNSS 数据到达时,先使用 last_imu_ 数据预积分到 GNSS 时刻。
- 5. 使用 IMU 预积分的预测值来作为优化的初始值(
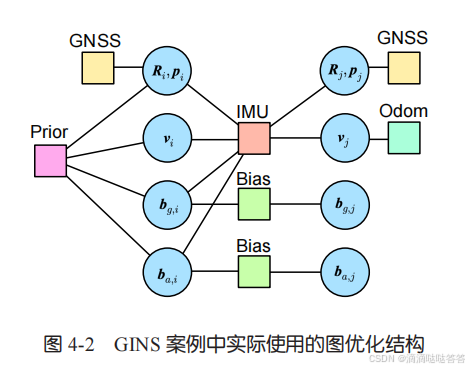
• 节点:前一时刻与当前时刻的位姿、速度、两个零偏,共 8 个顶点。
• 边:两个时刻间的预积分观测边,两个时刻的 GNSS 的观测边,前一个时刻的先验边,两个零偏随机游走边,速度观测边。这样一共有 7 个边。
3.1 代码实现
- 1. 使用 IMU 静止初始化算法来获取初始的零偏(
IMU 静止初始化代码如下:
run_gins_pre_integ.cc 主函数
/// IMU 处理函数
// IMU 静止初始化
if (!imu_init.InitSuccess()) {
imu_init.AddIMU(imu);
return;
} IMU 静止初始化完成后 ,使用静止初始化得到的 
run_gins_pre_integ.cc 主函数
/// 需要IMU初始化
if (!imu_inited) {
// 读取初始零偏,设置GINS
sad::GinsPreInteg::Options options;
options.preinteg_options_.init_bg_ = imu_init.GetInitBg();
options.preinteg_options_.init_ba_ = imu_init.GetInitBa();
options.gravity_ = imu_init.GetGravity();
gins.SetOptions(options);
imu_inited = true;
std::cout << "imu_inited = true" <<std::endl;
std::cout << "imu time:" << std::fixed << std::setprecision(8) << imu.timestamp_ << std::endl;
return;
} 初始化各类信息矩阵的代码如下(
void GinsPreInteg::SetOptions(sad::GinsPreInteg::Options options) {
options_ = options;
// 设置 bg 的信息矩阵
double bg_rw2 = 1.0 / (options_.bias_gyro_var_ * options_.bias_gyro_var_);
options_.bg_rw_info_.diagonal() << bg_rw2, bg_rw2, bg_rw2;
// 设置 ba 的信息矩阵
double ba_rw2 = 1.0 / (options_.bias_acce_var_ * options_.bias_acce_var_);
options_.ba_rw_info_.diagonal() << ba_rw2, ba_rw2, ba_rw2;
// 设置 GNSS 的信息矩阵
double gp2 = options_.gnss_pos_noise_ * options_.gnss_pos_noise_;
double gh2 = options_.gnss_height_noise_ * options_.gnss_height_noise_;
double ga2 = options_.gnss_ang_noise_ * options_.gnss_ang_noise_;
options_.gnss_info_.diagonal() << 1.0 / ga2, 1.0 / ga2, 1.0 / ga2, 1.0 / gp2, 1.0 / gp2, 1.0 / gh2;
// 初始化 IMU预积分类 的 实例对象
pre_integ_ = std::make_shared<IMUPreintegration>(options_.preinteg_options_);
// 设置 ODOM 的信息矩阵
double o2 = 1.0 / (options_.odom_var_ * options_.odom_var_);
options_.odom_info_.diagonal() << o2, o2, o2;
// 先验因子的信息矩阵
prior_info_.block<6, 6>(9, 9) = Mat6d ::Identity() * 1e6;
if (this_frame_) {
this_frame_->bg_ = options_.preinteg_options_.init_bg_;
this_frame_->ba_ = options_.preinteg_options_.init_ba_;
}
}当首个带姿态的 GNSS 数据到来时,使用该数据初始化初始位姿,初始速度为 0,初始的零偏等于预积分类中的零偏,即 IMU 静止初始化得到的零偏:
void GinsPreInteg::AddGnss(const GNSS& gnss) {
this_frame_ = std::make_shared<NavStated>(current_time_);
this_gnss_ = gnss;
if (!first_gnss_received_) {
if (!gnss.heading_valid_) {
// 要求首个GNSS必须有航向
return;
}
std::cout << "first gnss time:" << std::fixed << std::setprecision(8) << gnss.unix_time_ << std::endl;
// 首个gnss信号,将初始pose设置为该gnss信号
this_frame_->timestamp_ = gnss.unix_time_;
this_frame_->p_ = gnss.utm_pose_.translation();
this_frame_->R_ = gnss.utm_pose_.so3();
this_frame_->v_.setZero();
this_frame_->bg_ = options_.preinteg_options_.init_bg_;
this_frame_->ba_ = options_.preinteg_options_.init_ba_;
pre_integ_ = std::make_shared<IMUPreintegration>(options_.preinteg_options_);
last_frame_ = this_frame_;
last_gnss_ = this_gnss_;
first_gnss_received_ = true;
current_time_ = gnss.unix_time_;
return;
}
//* 省略 *//
}- 2. 当 IMU 数据到达时,使用预积分器来累计 IMU 的积分信息。
void GinsPreInteg::AddImu(const IMU& imu) {
if (first_gnss_received_ && first_imu_received_) {
std::cout << "---IMU 预积分" << std::endl;
pre_integ_->Integrate(imu, imu.timestamp_ - last_imu_.timestamp_);
}
first_imu_received_ = true;
last_imu_ = imu;
current_time_ = imu.timestamp_;
}- 3. 当 ODOM 数据到达时,我们将它记录为最近时刻的速度观测并保留它的读数。
void GinsPreInteg::AddOdom(const sad::Odom& odom) {
last_odom_ = odom;
last_odom_set_ = true;
}
- 4. 在 GNSS 数据到达时,先使用 last_imu_ 数据预积分到 GNSS 时刻。这里 last_imu_ 比较特殊,该数据使用了两次,这是第二次使用(第一次是前面的预积分),使用该数据预积分到当前 GNSS 的时刻:
void GinsPreInteg::AddGnss(const GNSS& gnss) {
this_frame_ = std::make_shared<NavStated>(current_time_);
this_gnss_ = gnss;
//* 省略 *//
// 积分到GNSS时刻
// 这部分为什么可以积分到GNSS时刻 ???
// 这个特殊的 last_imu_ 数据使用了两次,这是第二次使用(第一次是前面的预积分)。预积分到当前GNSS的时刻
pre_integ_->Integrate(last_imu_, gnss.unix_time_ - current_time_);
current_time_ = gnss.unix_time_;
// last_frame_ 和 this_frame_,使用 IMU 预积分的预测值来作为优化的初始值(this_frame_)
*this_frame_ = pre_integ_->Predict(*last_frame_, options_.gravity_);
Optimize();
last_frame_ = this_frame_;
last_gnss_ = this_gnss_;
}- 5. 使用 IMU 预积分的预测值来作为优化的初始值(
注意:①优化完成后将优化后的值重新赋值给 last_frame_ 和 this_frame_,并且使用优化后的
void GinsPreInteg::Optimize() {
if (pre_integ_->dt_ < 1e-3) {
// 未得到积分
return;
}
// 创建可变尺寸的 BlockSolver
using BlockSolverType = g2o::BlockSolverX;
using LinearSolverType = g2o::LinearSolverEigen<BlockSolverType::PoseMatrixType>;
auto* solver = new g2o::OptimizationAlgorithmLevenberg(
g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>()));
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm(solver);
// 上时刻顶点, pose, v, bg, ba
auto v0_pose = new VertexPose();
v0_pose->setId(0);
v0_pose->setEstimate(last_frame_->GetSE3());
optimizer.addVertex(v0_pose);
auto v0_vel = new VertexVelocity();
v0_vel->setId(1);
v0_vel->setEstimate(last_frame_->v_);
optimizer.addVertex(v0_vel);
auto v0_bg = new VertexGyroBias();
v0_bg->setId(2);
v0_bg->setEstimate(last_frame_->bg_);
optimizer.addVertex(v0_bg);
auto v0_ba = new VertexAccBias();
v0_ba->setId(3);
v0_ba->setEstimate(last_frame_->ba_);
optimizer.addVertex(v0_ba);
// 本时刻顶点,pose, v, bg, ba
// this_frame_ 是从 起始点last_frame_ 开始通过 IMU预积分 得到的预测值,在这里作为图优化的初始值。
auto v1_pose = new VertexPose();
v1_pose->setId(4);
v1_pose->setEstimate(this_frame_->GetSE3());
optimizer.addVertex(v1_pose);
auto v1_vel = new VertexVelocity();
v1_vel->setId(5);
v1_vel->setEstimate(this_frame_->v_);
optimizer.addVertex(v1_vel);
auto v1_bg = new VertexGyroBias();
v1_bg->setId(6);
v1_bg->setEstimate(this_frame_->bg_);
optimizer.addVertex(v1_bg);
auto v1_ba = new VertexAccBias();
v1_ba->setId(7);
v1_ba->setEstimate(this_frame_->ba_);
optimizer.addVertex(v1_ba);
// 预积分边
auto edge_inertial = new EdgeInertial(pre_integ_, options_.gravity_);
edge_inertial->setVertex(0, v0_pose);
edge_inertial->setVertex(1, v0_vel);
edge_inertial->setVertex(2, v0_bg);
edge_inertial->setVertex(3, v0_ba);
edge_inertial->setVertex(4, v1_pose);
edge_inertial->setVertex(5, v1_vel);
auto* rk = new g2o::RobustKernelHuber();
rk->setDelta(200.0);
edge_inertial->setRobustKernel(rk);
optimizer.addEdge(edge_inertial);
// 两个零偏随机游走
auto* edge_gyro_rw = new EdgeGyroRW();
edge_gyro_rw->setVertex(0, v0_bg);
edge_gyro_rw->setVertex(1, v1_bg);
edge_gyro_rw->setInformation(options_.bg_rw_info_);
optimizer.addEdge(edge_gyro_rw);
auto* edge_acc_rw = new EdgeAccRW();
edge_acc_rw->setVertex(0, v0_ba);
edge_acc_rw->setVertex(1, v1_ba);
edge_acc_rw->setInformation(options_.ba_rw_info_);
optimizer.addEdge(edge_acc_rw);
// 上时刻先验
auto* edge_prior = new EdgePriorPoseNavState(*last_frame_, prior_info_);
edge_prior->setVertex(0, v0_pose);
edge_prior->setVertex(1, v0_vel);
edge_prior->setVertex(2, v0_bg);
edge_prior->setVertex(3, v0_ba);
optimizer.addEdge(edge_prior);
// GNSS边
auto edge_gnss0 = new EdgeGNSS(v0_pose, last_gnss_.utm_pose_);
edge_gnss0->setInformation(options_.gnss_info_);
optimizer.addEdge(edge_gnss0);
auto edge_gnss1 = new EdgeGNSS(v1_pose, this_gnss_.utm_pose_);
edge_gnss1->setInformation(options_.gnss_info_);
optimizer.addEdge(edge_gnss1);
// Odom边
EdgeEncoder3D* edge_odom = nullptr;
Vec3d vel_world = Vec3d::Zero();
Vec3d vel_odom = Vec3d::Zero();
if (last_odom_set_) {
// velocity obs
double velo_l =
options_.wheel_radius_ * last_odom_.left_pulse_ / options_.circle_pulse_ * 2 * M_PI / options_.odom_span_;
double velo_r =
options_.wheel_radius_ * last_odom_.right_pulse_ / options_.circle_pulse_ * 2 * M_PI / options_.odom_span_;
double average_vel = 0.5 * (velo_l + velo_r);
vel_odom = Vec3d(average_vel, 0.0, 0.0);
vel_world = this_frame_->R_ * vel_odom;
edge_odom = new EdgeEncoder3D(v1_vel, vel_world);
edge_odom->setInformation(options_.odom_info_);
optimizer.addEdge(edge_odom);
// 重置odom数据到达标志位,等待最新的odom数据
last_odom_set_ = false;
}
optimizer.setVerbose(options_.verbose_);
optimizer.initializeOptimization();
optimizer.optimize(20);
if (options_.verbose_) {
// 获取结果,统计各类误差
LOG(INFO) << "chi2/error: ";
LOG(INFO) << "preintegration: " << edge_inertial->chi2() << "/" << edge_inertial->error().transpose();
// LOG(INFO) << "gnss0: " << edge_gnss0->chi2() << ", " << edge_gnss0->error().transpose();
LOG(INFO) << "gnss1: " << edge_gnss1->chi2() << ", " << edge_gnss1->error().transpose();
LOG(INFO) << "bias: " << edge_gyro_rw->chi2() << "/" << edge_acc_rw->error().transpose();
LOG(INFO) << "prior: " << edge_prior->chi2() << "/" << edge_prior->error().transpose();
if (edge_odom) {
LOG(INFO) << "body vel: " << (v1_pose->estimate().so3().inverse() * v1_vel->estimate()).transpose();
LOG(INFO) << "meas: " << vel_odom.transpose();
LOG(INFO) << "odom: " << edge_odom->chi2() << "/" << edge_odom->error().transpose();
}
}
last_frame_->R_ = v0_pose->estimate().so3();
last_frame_->p_ = v0_pose->estimate().translation();
last_frame_->v_ = v0_vel->estimate();
last_frame_->bg_ = v0_bg->estimate();
last_frame_->ba_ = v0_ba->estimate();
this_frame_->R_ = v1_pose->estimate().so3();
this_frame_->p_ = v1_pose->estimate().translation();
this_frame_->v_ = v1_vel->estimate();
this_frame_->bg_ = v1_bg->estimate();
this_frame_->ba_ = v1_ba->estimate();
// 重置integ
// 更新 bg、ba,重置预积分
options_.preinteg_options_.init_bg_ = this_frame_->bg_;
options_.preinteg_options_.init_ba_ = this_frame_->ba_;
pre_integ_ = std::make_shared<IMUPreintegration>(options_.preinteg_options_);
}最后运行基于图优化的GINS:
/// 设置各类回调函数
io.SetIMUProcessFunc([&](const sad::IMU& imu) {
if (imu_init.InitSuccess()){
std::cout << "IMU 处理函数! " << "imu_inited:" << imu_inited << " gnss_inited:" << gnss_inited << std::endl;
}
/// IMU 处理函数
// IMU 静止初始化
if (!imu_init.InitSuccess()) {
imu_init.AddIMU(imu);
return;
}
/// 需要IMU初始化
if (!imu_inited) {
// 读取初始零偏,设置GINS
sad::GinsPreInteg::Options options;
options.preinteg_options_.init_bg_ = imu_init.GetInitBg();
options.preinteg_options_.init_ba_ = imu_init.GetInitBa();
options.gravity_ = imu_init.GetGravity();
gins.SetOptions(options);
imu_inited = true;
std::cout << "imu_inited = true" <<std::endl;
std::cout << "imu time:" << std::fixed << std::setprecision(8) << imu.timestamp_ << std::endl;
return;
}
if (!gnss_inited) {
/// 等待有效的RTK数据
return;
}
// 与 ESKF 不同之处!!!
/// GNSS 也接收到之后,再开始进行预测
gins.AddImu(imu);
auto state = gins.GetState();
save_result(fout, state);
if (ui) {
ui->UpdateNavState(state);
usleep(5e2);
}
})
.SetGNSSProcessFunc([&](const sad::GNSS& gnss) {
if (imu_init.InitSuccess()){
std::cout << "GNSS 处理函数! " << "imu_inited:" << imu_inited << " gnss_inited:" << gnss_inited << std::endl;
}
/// GNSS 处理函数
if (!imu_inited) {
return;
}
// heading_valid_ 数据由 GNSS 构造函数确定
sad::GNSS gnss_convert = gnss;
if (!sad::ConvertGps2UTM(gnss_convert, antenna_pos, FLAGS_antenna_angle) || !gnss_convert.heading_valid_) {
return;
}
/// 去掉原点
if (!first_gnss_set) {
origin = gnss_convert.utm_pose_.translation();
first_gnss_set = true;
std::cout << "gnss_inited = true" <<std::endl;
std::cout << "gnss time:" << std::fixed << std::setprecision(8) << gnss_convert.unix_time_ << std::endl;
}
gnss_convert.utm_pose_.translation() -= origin;
// 与 ESKF 不同之处!!!
gins.AddGnss(gnss_convert);
auto state = gins.GetState();
save_result(fout, state);
if (ui) {
ui->UpdateNavState(state);
usleep(1e3);
}
gnss_inited = true;
})
.SetOdomProcessFunc([&](const sad::Odom& odom) {
if (imu_init.InitSuccess()){
std::cout << "ODOM 处理函数! " << "imu_inited:" << imu_inited << " gnss_inited:" << gnss_inited << std::endl;
}
imu_init.AddOdom(odom);
if (imu_inited && gnss_inited) {
// 与 ESKF 不同之处!!!
gins.AddOdom(odom);
}
})
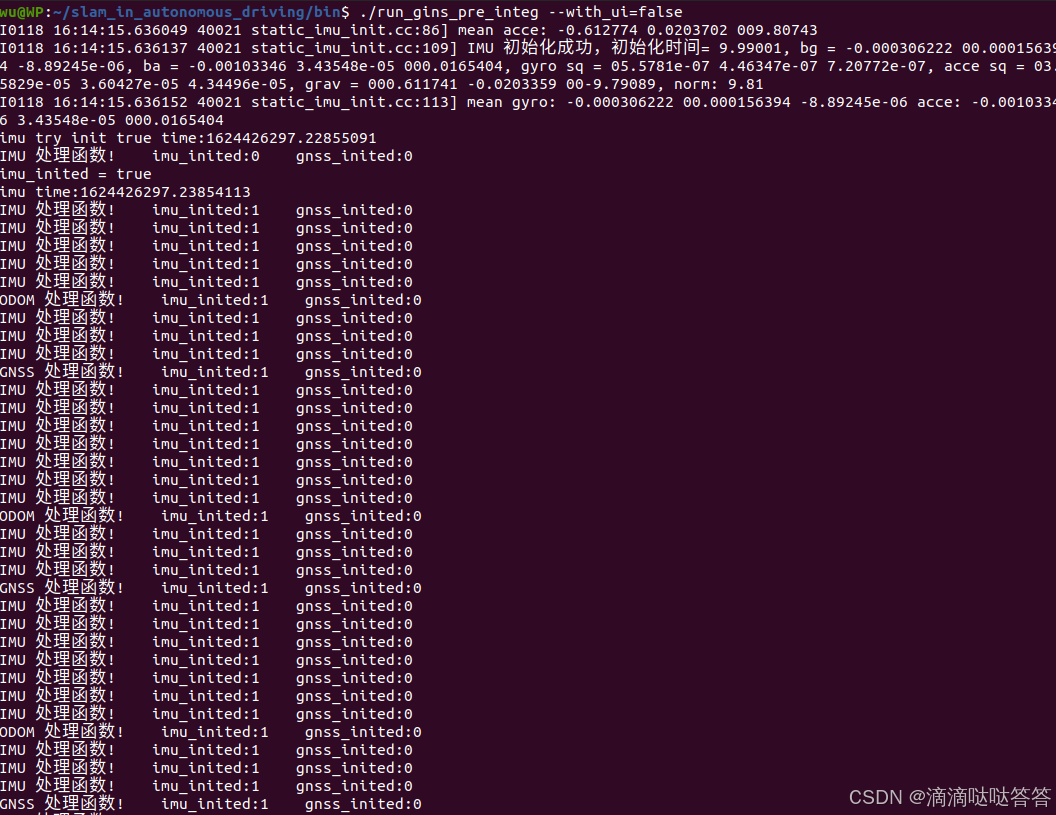
.Go();3.2 运行结果
IMU 静止初始化结果:
I0118 16:14:15.636049 40021 static_imu_init.cc:86] mean acce: -0.612774 0.0203702 009.80743
I0118 16:14:15.636137 40021 static_imu_init.cc:109] IMU 初始化成功,初始化时间= 9.99001, bg = -0.000306222 00.000156394 -8.89245e-06, ba = -0.00103346 3.43548e-05 000.0165404, gyro sq = 05.5781e-07 4.46347e-07 7.20772e-07, acce sq = 03.5829e-05 3.60427e-05 4.34496e-05, grav = 000.611741 -0.0203359 00-9.79089, norm: 9.81
I0118 16:14:15.636152 40021 static_imu_init.cc:113] mean gyro: -0.000306222 00.000156394 -8.89245e-06 acce: -0.00103346 3.43548e-05 000.0165404
某一轮优化过程:
GNSS 处理函数! imu_inited:1 gnss_inited:1
iteration= 0 chi2= 11.939758 time= 2.537e-05 cumTime= 2.537e-05 edges= 7 schur= 0 lambda= 6666674.355996 levenbergIter= 1
iteration= 1 chi2= 11.937747 time= 1.0831e-05 cumTime= 3.6201e-05 edges= 7 schur= 0 lambda= 4444449.570664 levenbergIter= 1
iteration= 2 chi2= 11.934778 time= 1.069e-05 cumTime= 4.6891e-05 edges= 7 schur= 0 lambda= 2962966.380443 levenbergIter= 1
iteration= 3 chi2= 11.930420 time= 1.0512e-05 cumTime= 5.7403e-05 edges= 7 schur= 0 lambda= 1975310.920295 levenbergIter= 1
iteration= 4 chi2= 11.924066 time= 1.0654e-05 cumTime= 6.8057e-05 edges= 7 schur= 0 lambda= 1213094.557098 levenbergIter= 1
iteration= 5 chi2= 11.914094 time= 1.074e-05 cumTime= 7.8797e-05 edges= 7 schur= 0 lambda= 549789.382063 levenbergIter= 1
iteration= 6 chi2= 11.893194 time= 1.048e-05 cumTime= 8.9277e-05 edges= 7 schur= 0 lambda= 183263.127354 levenbergIter= 1
iteration= 7 chi2= 11.834372 time= 1.0341e-05 cumTime= 9.9618e-05 edges= 7 schur= 0 lambda= 61087.709118 levenbergIter= 1
iteration= 8 chi2= 11.669598 time= 1.0288e-05 cumTime= 0.000109906 edges= 7 schur= 0 lambda= 20362.569706 levenbergIter= 1
iteration= 9 chi2= 11.239074 time= 1.0601e-05 cumTime= 0.000120507 edges= 7 schur= 0 lambda= 6787.523235 levenbergIter= 1
iteration= 10 chi2= 10.292144 time= 1.0354e-05 cumTime= 0.000130861 edges= 7 schur= 0 lambda= 2262.507745 levenbergIter= 1
iteration= 11 chi2= 8.562370 time= 1.046e-05 cumTime= 0.000141321 edges= 7 schur= 0 lambda= 754.169248 levenbergIter= 1
iteration= 12 chi2= 5.795209 time= 1.0682e-05 cumTime= 0.000152003 edges= 7 schur= 0 lambda= 251.389749 levenbergIter= 1
iteration= 13 chi2= 3.136536 time= 1.0396e-05 cumTime= 0.000162399 edges= 7 schur= 0 lambda= 83.796583 levenbergIter= 1
iteration= 14 chi2= 2.276110 time= 1.071e-05 cumTime= 0.000173109 edges= 7 schur= 0 lambda= 27.932194 levenbergIter= 1
iteration= 15 chi2= 2.216088 time= 1.0856e-05 cumTime= 0.000183965 edges= 7 schur= 0 lambda= 9.310731 levenbergIter= 1
iteration= 16 chi2= 2.215426 time= 1.0525e-05 cumTime= 0.00019449 edges= 7 schur= 0 lambda= 6.207154 levenbergIter= 1
iteration= 17 chi2= 2.215425 time= 1.051e-05 cumTime= 0.000205 edges= 7 schur= 0 lambda= 4.138103 levenbergIter= 1
iteration= 18 chi2= 2.215425 time= 1.0608e-05 cumTime= 0.000215608 edges= 7 schur= 0 lambda= 2.758735 levenbergIter= 1
iteration= 19 chi2= 2.215425 time= 1.0528e-05 cumTime= 0.000226136 edges= 7 schur= 0 lambda= 1.839157 levenbergIter= 1
I0118 16:15:22.336377 40077 gins_pre_integ.cc:240] chi2/error:
I0118 16:15:22.336380 40077 gins_pre_integ.cc:241] preintegration: 0.00249247/05.70395e-08 -2.69427e-08 -6.17484e-07 -0.000170989 -9.10803e-05 09.26133e-07 -1.31586e-05 -6.98776e-06 07.65849e-08
I0118 16:15:22.336386 40077 gins_pre_integ.cc:243] gnss1: 0.0543654, 00.00120472 -0.00234341 00.00125066 000.0156347 -0.00404241 -0.00189687
I0118 16:15:22.336392 40077 gins_pre_integ.cc:244] bias: 0/0 0 0
I0118 16:15:22.336395 40077 gins_pre_integ.cc:245] prior: 1.69277/000.00167301 0-0.00260842 00-0.0103468 -7.47095e-05 00.000265061 00.000486168 000-0.128167 00-0.0195928 00.000358022 -1.37342e-07 0001.857e-07 06.22816e-07 01.71906e-06 09.29327e-07 00-9.148e-09
I0118 16:15:22.336407 40077 gins_pre_integ.cc:247] body vel: 0000.612737 000.0214819 -0.00161771
I0118 16:15:22.336410 40077 gins_pre_integ.cc:248] meas: 0.584907 00000000 00000000
I0118 16:15:22.336413 40077 gins_pre_integ.cc:249] odom: 0.405799/00000.031448 000.00505169 -1.74854e-05
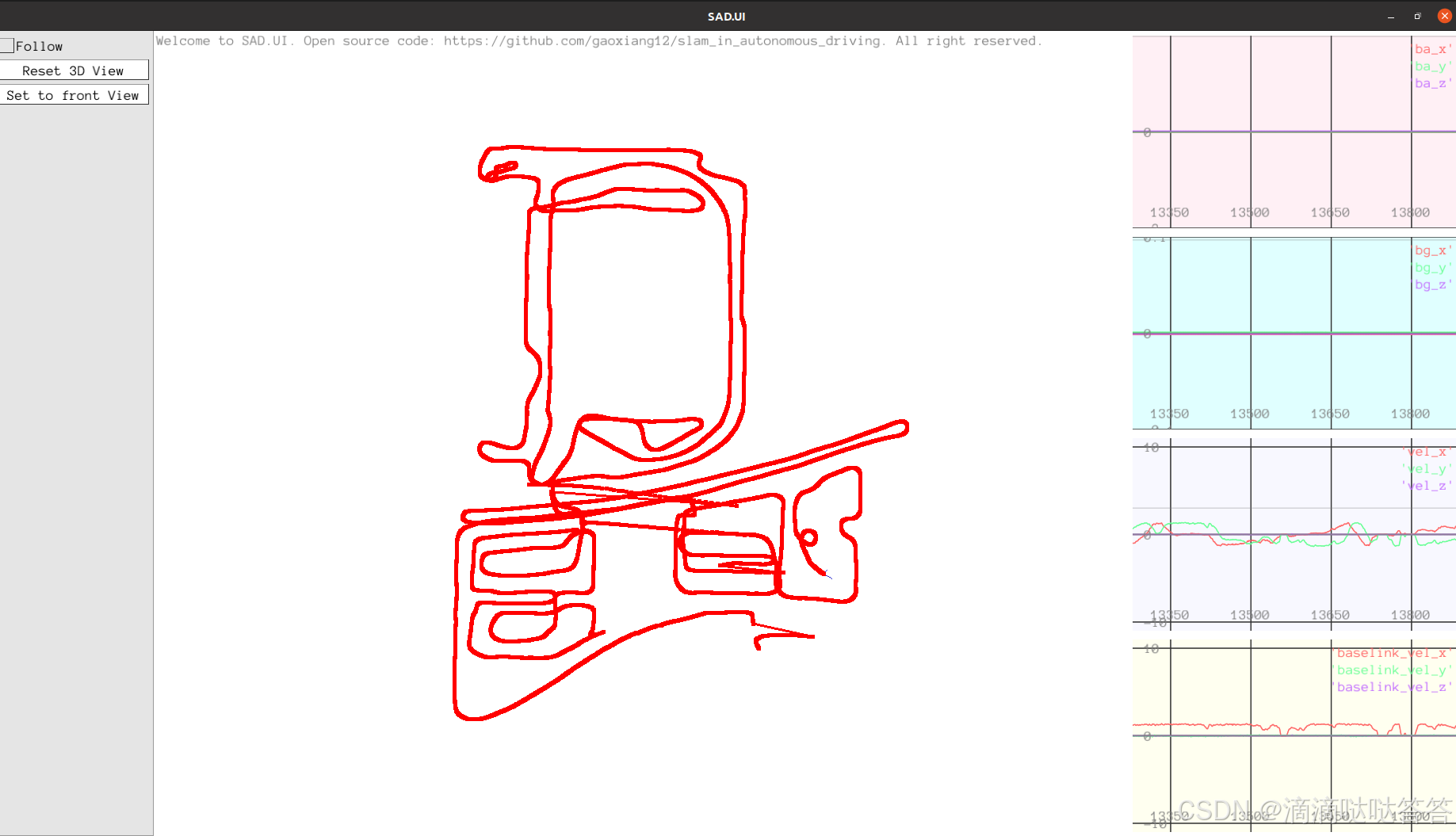
实时运行结果:
3.3 总结
3.3.1 图优化和 ESKF 的区别
- 1. 相比 ESKF,基于预积分的图优化方案可以累积 IMU 读数。累积多少时间,或者每次迭代优化取多少次,都可以人为选择。而 ESKF 默认只能迭代一次,预测也只依据单个时刻的IMU 数据。
- 2. 预积分边(或者用因子图优化的方法,称 IMU 因子或预积分因子)是一个很灵活的因子。它关联的六个顶点都可以发生变化。为了保持状态不发生随意改变,预积分因子通常要配合其他因子一起使用。在我们的案例中,两端的 GNSS 因子可以限制位姿的变化,ODOM 因子可以限制速度的改变,两个零偏因子会限制零偏的变化量,但不限制零偏的绝对值。
- 3. 先验因子会让整个估计变得更平滑。严格来说,先验因子的协方差矩阵还需要使用边缘化来操作。因为本章主要介绍预积分原理,所以我们给先验因子设定了固定大小的信息矩阵,来简化程序中的一些实现。本书的第 8 章中,我们会谈论先验因子信息矩阵的设定和代码实现方式。读者可以尝试去除本因子,看看轨迹估计会产生什么影响。
- 4. 图优化让我们很方便地设置核函数,回顾各个因子占据的误差大小,进而确定优化过程主要受哪一部分影响。例如,我们可以分析正常情况下 RTK 观测应该产生多少残差,而异常情况下应该产生多少残差,从而确定 GNSS 是否给出了正确的位姿读数。后面我们还会向读者介绍如何来控制优化流程以实现更鲁棒的效果。读者可以打开本程序的调试输出,查看这些信息。
- 5. 由于引入了更多计算,图优化的耗时明显要高于滤波器方案。不过,智能汽车的算力相比以往有了明显的增加,目前图优化在一些实时计算里也可以很好地使用了。
3.3.2 总结
本章介绍了预积分的基本原理,包括它的观测模型、噪声模型、雅可比推导方式以及针对零偏的处理方式。读者在实践当中也可以灵活应用预积分:
- 若不考虑优化,那么预积分和直接积分完全等同;预积分可以用于预测后续状态。
- 用于优化时,预积分可以方便地建模两帧间的相对运动。如果固定 IMU 零偏,还可以大幅简化预积分模型。如果考虑零偏,那么需要针对零偏的更新,来更新预积分的观测;
- 预积分模型可以很容易地与其他图优化模型进行融合,在同一个问题中进行优化。也可以很方便地设置积分时间、优化帧数等参数,相比于滤波器方案更加自由。