目录
一.内容概述
- 上节课介绍了 model-base 的方法,这节课将介绍 model-free 的方法,上节课的 policy iteration 的方法是这节课的基础,我们把 policy iteration 当中基于模型的部分替换成不需要模型的部分就得到了今天的算法。
- 在这门课中,把 value iteration 和 policy iteration 统称为 model-base reinforcement learning,但是更准确来说,它们应该称为动态规划(dynamic programming)的方法。model-base reinforcement learning 简称 MBRL,这个研究的是我用数据估计出一个模型,再基于这个模型进行强化学习。
- 这节课介绍没有模型的强化学习方法,首先我们要学习随机变量的期望值,因为之前提到的 state value 和 action value 全都是随机变量的期望值,对随机变量采样的平均值可以作为 E[X] 的一个很好的近似。所以没有模型要有数据,没有数据要有模型才能学习。
课程大纲:
1.激励性实例(Motivating examples):介绍蒙特卡洛估计(Mento Carlo Estimation)的基本思想
2.介绍三个基于蒙特卡洛(MC)强化学习的算法(这三个算法环环相扣,前一个是后一个的基础)
(1)最简单的基于 MC 的 RL 算法:MC basic(我们把上节课介绍的 policy iteration 方法当中基于模型的部分替换成不需要模型的部分(依赖于数据的)就得到了这个算法。是最简单的基于蒙特卡洛强化学习的算法,简单到这个算法在实际中不能用,因为效率很低,但他有利于揭示怎么样把模型给去掉,不基于模型来实现强化学习的这样一个核心idea,即它可以帮助理解之后的,因为强化学习是一环扣一环的)
(2)更高效地使用数据:MC Exploring Starts(把 MC basic 复杂化)
(3)MC 没有探索就启动:Algorithm: MC ε-Greedy(去除掉 exploring starts 这样的 assumption)
二.激励性实例(Motivating examples)
从 model-based 强化学习过渡到 model-free 的强化学习,最难以理解的就是我们如何在没有模型的情况下去估计一些量?(How can we estimate something without models)
最简单的方法:蒙特卡洛估算(Monte Carlo estimation)。
下面通过一个例子说明蒙特卡洛估算: 投掷硬币
投掷硬币后的结果(正面或背面朝上)用随机变量(random variable) X 表示
- 如果结果为正面朝上,则 X = +1
- 如果结果是背面朝上,则 X = -1
目的是计算 E [ X ] \mathbb{E}[X] E[X](X 的平均数,X 的期望)。
这里有两种方法计算期望
- 方法 1 :基于模型的(model-based)
假设概率模型为(我们知道随机变量(random variable) X 的概率分布(probability distribution)):正面朝上和背面朝上的概率都是 0.5
p
(
X
=
1
)
=
0.5
p
(
X
=
−
1
)
=
0.5
p(X=1)=0.5 \qquad \qquad p(X=-1)=0.5
p(X=1)=0.5p(X=−1)=0.5
那么随机变量(random variable) X 它的期望(expectation)就可以简单的通过定义计算:
E
[
X
]
=
∑
x
x
p
(
x
)
=
1
×
0.5
+
(
−
1
)
×
0.5
=
0
\mathbb{E}[X] = \sum_{x}xp(x)=1 \times 0.5 + (-1) \times 0.5 = 0
E[X]=x∑xp(x)=1×0.5+(−1)×0.5=0
**问题:**可能无法知道精确的概率分布情况(precise distribution)!!
- 方法 2 :无模型的(model-free)
基本思想:多次掷硬币,做很多次实验,得到很多的采样,然后计算所有采样的平均结果。
假设我们做了 N 次实验,这 N 次的实验结果分别是
x
1
,
x
2
,
.
.
.
,
x
N
x_1,x_2,...,x_N
x1,x2,...,xN,得到一个样本序列:
{
x
1
,
x
2
,
…
,
x
N
}
\{x_1, x_2, \dots, x_N \}
{x1,x2,…,xN}。那么,均值可以近似为:
E
[
X
]
≈
x
ˉ
=
1
N
∑
j
=
1
N
x
j
\mathbb{E}[X] \approx \bar{x} = \frac{1}{N}\sum_{j=1}^N x_j
E[X]≈xˉ=N1j=1∑Nxj
期望(expectation)用
x
ˉ
\bar{x}
xˉ 来近似,认为
x
ˉ
\bar{x}
xˉ 是
E
[
X
]
\mathbb{E}[X]
E[X]
这就是蒙特卡洛估计的基本思想!
**问题:**用蒙特卡洛估计(Mento Carlo Estimation)是否精确?
- 当 N 较小时,近似值不准确。
- 随着 N 的增大,近似值会越来越精确。
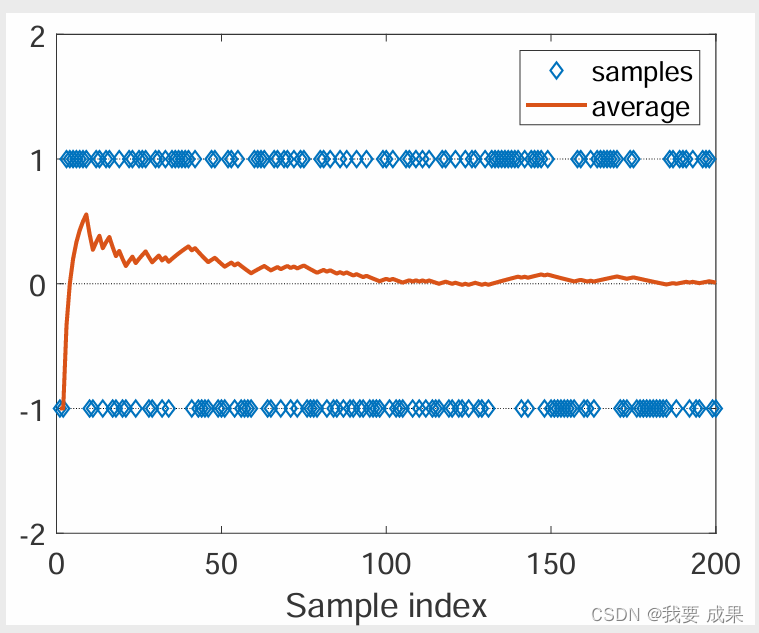
如上图所示,我们已知真实的期望(expectation)是 0,随着做平均的样本数越多,样本的平均值(expectation)越接近真实的期望(expectation)0
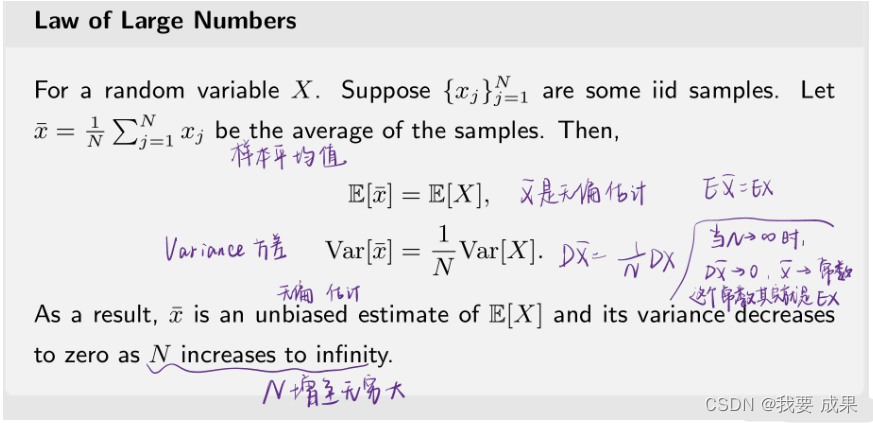
上面这样直观的解释有数学理论做支撑(大数定律 Law of large Numbers)
iid:独立同分布样本(independent and identically distributed sample)
总结:
- 蒙特卡罗估计是指依靠重复随机抽样来解决近似问题的一大类技术。凡是需要做大量的采样实验,最后用实验的结果近似的的方法,都可以称为蒙特卡洛估计的方法。
- 我们为什么要关注蒙特卡罗估计?因为它不需要模型!
- 为什么要关注均值估计(mean estimation)?为什么用蒙特卡洛来估计期望(expectation)?
- 因为状态值(state value)和行动值(action value)被定义为随机变量的期望值(expectation)!
三.最简单的基于 MC 的 RL 算法:MC basic
1.将策略迭代转换为无模型迭代(Convert policy iteration to be model-free)
理解算法的关键是理解如何将策略迭代算法(policy iteration algorithm)转换为无模型算法(model-free)。我们知道策略迭代算法(policy iteration algorithm)是依赖于模型的,但是实际上我们可以把它依赖于模型的那部分给替换掉,替换成 model-free 的模块
- 应充分理解策略迭代(policy iteration algorithm)。
- 应理解蒙特卡罗均值估计(Monte Carlo mean estimation)的思想。
接下来看策略迭代算法(policy iteration algorithm)如何转换为无模型(model-free)的:
策略迭代(policy iteration algorithm)的每一次迭代都有两个步骤:
- 1.策略评估:我有一个策略 π k \pi_k πk,通过求解贝尔曼公式,我要求出来它的状态值(state value) v π k v_{\pi_k} vπk
- 2.策略改进:知道 v π k v_{\pi_k} vπk 之后就可以做改进,求解一个最优化问题得到一个新的策略 π k + 1 \pi_{k+1} πk+1。(通过选择最大的 q π k q_{\pi_k} qπk 得到新的策略 π k + 1 \pi_{k+1} πk+1)
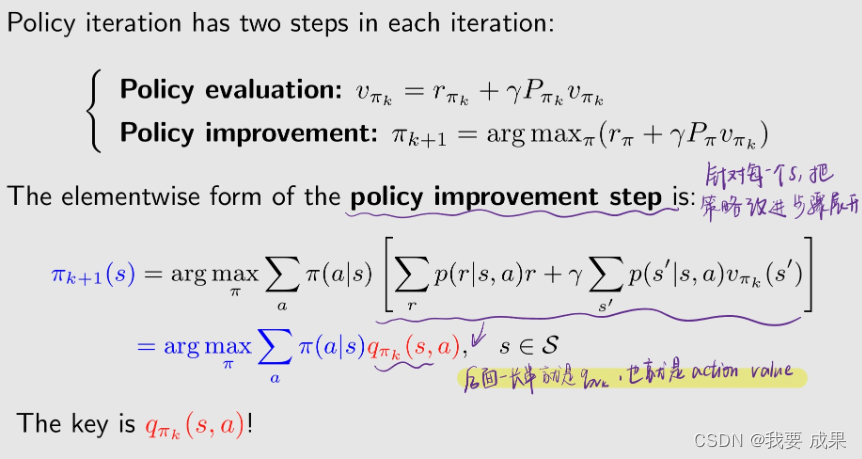
这里面非常核心的量是 q π k ( s , a ) q_{\pi_k} (s,a) qπk(s,a)
要计算动作值(action value) q π k ( s , a ) q_{\pi_k} (s,a) qπk(s,a) 有两种算法:
**方法 1 需要模型:**这就是 value iteration 这个算法所使用的,第一步得到了
v
π
k
v_{\pi_k}
vπk,第二步这些概率模型都是知道的,所以就可以求出来
q
π
k
(
s
,
a
)
q_{\pi_k} (s,a)
qπk(s,a) (这些概率代表系统的模型)
q
π
k
(
s
,
a
)
=
∑
r
p
(
r
∣
s
,
a
)
r
+
γ
∑
s
′
p
(
s
′
∣
s
,
a
)
v
π
k
(
s
′
)
q_{\pi_k} (s,a)=\sum_r p(r|s,a)r+\gamma \sum_{s'} p(s'|s,a)v_{\pi_k}(s')
qπk(s,a)=r∑p(r∣s,a)r+γs′∑p(s′∣s,a)vπk(s′)
**方法 2 不需要模型:**这种方法依赖于动作值(action value)
q
π
k
(
s
,
a
)
q_{\pi_k} (s,a)
qπk(s,a) 最最原始的定义。就是从当前状态 s 出发,选择动作 a 之后,我所得到的回报(return)
G
t
G_t
Gt,这个 return 是一个随机变量,我求它的平均(average)或者求期望(expectation)就是动作值(action value)
q
π
k
(
s
,
a
)
=
E
[
G
t
∣
S
t
=
s
,
A
t
=
a
]
q_{\pi_k} (s,a)=\mathbb{E}[G_t|S_t=s,A_t=a]
qπk(s,a)=E[Gt∣St=s,At=a]
理解:
- 老师在前面提到多,p这些概率是基于model的,model-free就是不用model,也就是不用到概率矩阵
- 是的,也就是不需要知道概率分布,
上面这个式子是基于蒙特卡洛方法的核心思想,这是一个均值估计(mean estimation)的问题,在第一部分(motivating example)中介绍了蒙特卡洛估计(Monte Carlo estimation)可以用来解决均值估计(mean estimation)的问题
实现无模型 RL 的思路: 我们可以使用方法 2 的表达式,根据数据(样本或经验)计算 q π k ( s , a ) q_{\pi_k} (s,a) qπk(s,a)!
动作值(action value)的蒙特卡洛估计(Monte Carlo estimation)程序:(episode就是根据一个给定策略进行的一次试验的轨迹(trajectory),在第一课里介绍过这个词)
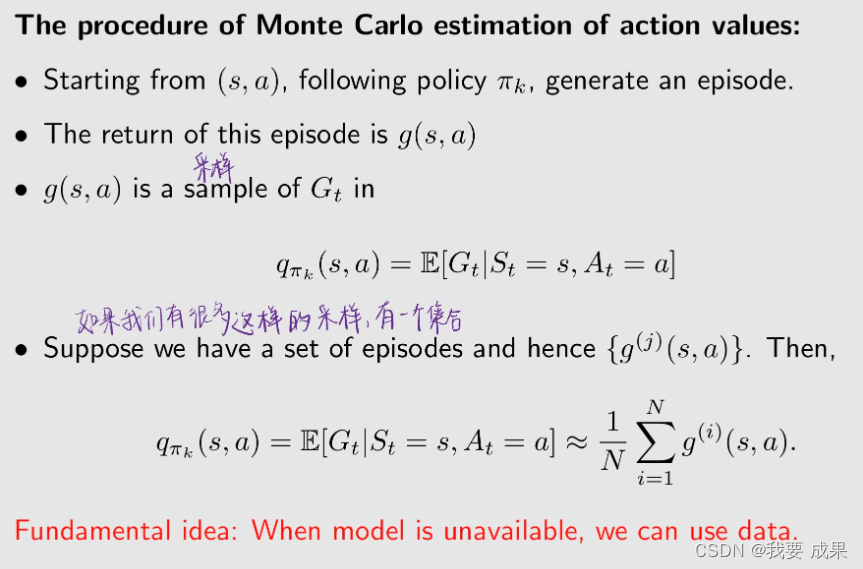
- 从任意一个 ( s , a ) (s,a) (s,a) 的组合开始,根据当前的策略 π k \pi_k πk ,得到一个 episode( 在第一章中介绍了:当智能体按照策略(policy)与环境交互时,可能会在某些终端状态(terminal states)停止。由此产生的轨迹(trajectory)称为一集(an episode)(或一次试验 trail))
- 计算出来这个 episode 对应的折扣回报(discounted return) g ( s , a ) g(s,a) g(s,a)
- G t G_t Gt 是一个随机变量(random variable), g ( s , a ) g(s,a) g(s,a) 是这个随机变量 G t G_t Gt 的一个采样
q π k ( s , a ) = E [ G t ∣ S t = s , A t = a ] q_{\pi_k} (s,a)=\mathbb{E}[G_t|S_t=s,A_t=a] qπk(s,a)=E[Gt∣St=s,At=a]
- 如果我们有很多这样的采样,有一个集合,我们就可以用这些采样 g 求一个平均值,来估计 Gt 的这个平均值,就是估计 Gt 的期望(expectation)。这个就是蒙特卡洛估计(Monte Carlo estimation),刚才在第一部分 motivating example 中介绍的
q π k ( s , a ) = E [ G t ∣ S t = s , A t = a ] ≈ 1 N ∑ i = 1 N g ( i ) ( s , a ) q_{\pi_k} (s,a)=\mathbb{E}[G_t|S_t=s,A_t=a] \approx \frac{1}{N} \sum_{i=1}^N g^{(i)}(s,a) qπk(s,a)=E[Gt∣St=s,At=a]≈N1i=1∑Ng(i)(s,a)
基本理念: 当模型不可用时,我们可以使用数据。(没有模型就要有数据,没有数据就要有模型)(Fundamental idea: When model is unavailable, we can use data. )这里的数据在统计或者是概率里面叫样本(sample),在强化学习中它有一个特殊的名字叫经验(experience)
2.The MC Basic algorithm
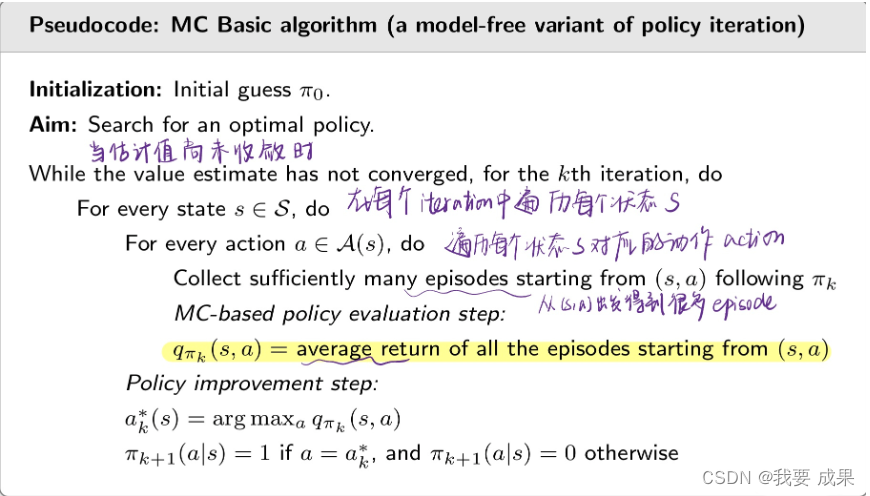
到此为止,算法已经逐渐清晰了,这个算法的名字叫:MC Basic algorithm,MC是蒙特卡洛首字母的缩写
算法描述:
伪代码:
理解:每一个 episode 的 return 不是 model-based 的吗,否则要怎么算呢?
- 每个a得到很多轨迹和 return 然后估算 action value
- model-based直接算的就是期望,这个是采样
- 这些轨迹是实验得来的不是算概率分布得来的 所以是model-free
- 直接丢给环境,环境会返回结果,但是环境变化的分布我们是不知道的,根据返回结果experence来估计
- 不知道模型是指你不知道模型的概率分布,但你做实验会知道结果
- 就是和环境一直交互到一幕结束,把每一步的奖励累计就是return。不用模型
- 这些return是与环境交互的结果吧,不需要知道model
- 是用样本拟合的均值return
- 你可以理解就是环境的动力学用一个外挂代理模块来实现,你算法只需要调用它就行
- MC Basic 是策略迭代算法(policy iteration algorithm)的一种变体,就是把基于 model 的模块拿掉,换成一个不需要 model 的模块。
- 无模型算法是在基于模型算法的基础上建立起来的。因此,在研究无模型算法之前,有必要先了解基于模型的算法。
- 要学习基于蒙特卡洛的强化学习的算法,首先应该明白基于模型的 policy iteration 的算法
- MC Basic 有助于揭示基于 MC 的无模型 RL(MC-based model-free RL)的核心思想,MC Basic 有助于揭示如何把 model-base 变成 model-free 的过程,但由于效率低(low efficiency)而不实用,之后还会介绍两个算法提高效率(efficiency)。之后会介绍怎么更高效的去更新数据,怎么去掉一些实际当中难以实现的假设等等,这会让算法看起来更复杂也更实用。
- 既然策略迭代(policy iteration algorithm)是收敛的,那么 MC Basic 的收敛性也是有保证的,因为他俩类似,只是估计 action value 的方法有些差别。
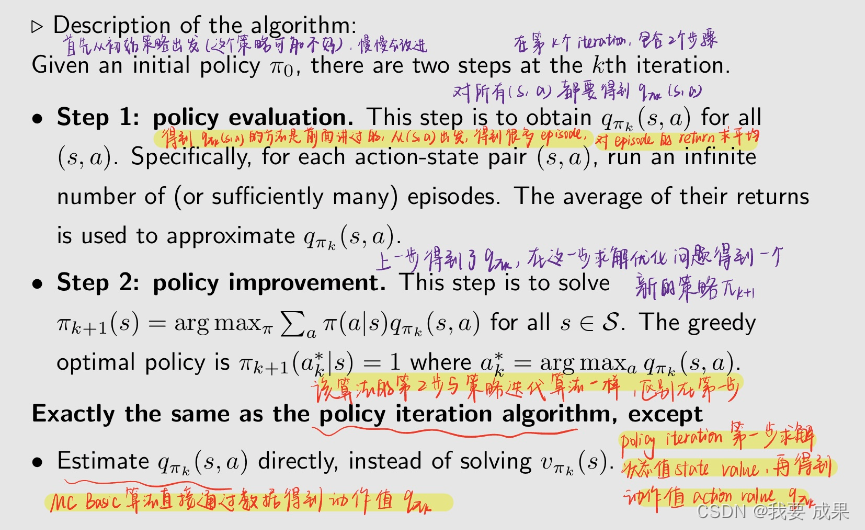
为什么 MC Basic 估算的是动作值而不是状态值?MC Basic 是直接来估计动作值(action value),而在 policy iteration 中是先估计了 state value,再转成 action value
- 这是因为如果要估计 state value,之后还要转成 action value,那从 state value 到 action value 又依赖于模型,这是不行的,所以要直接把 action value 估计出来。状态值不能直接用于改进策略,当没有模型时,我们应该直接估计行动值。
3.例子
(1)例子 1
在下面的例子中,有一个初始策略 π 0 \pi_0 π0(图中绿色箭头),在其他状态策略不错,只是在状态 s 1 , s 3 s_1,s_3 s1,s3 策略不太好。接下来就从 π 0 \pi_0 π0 出发,用 MC Basic 算法找到一个最优的策略。
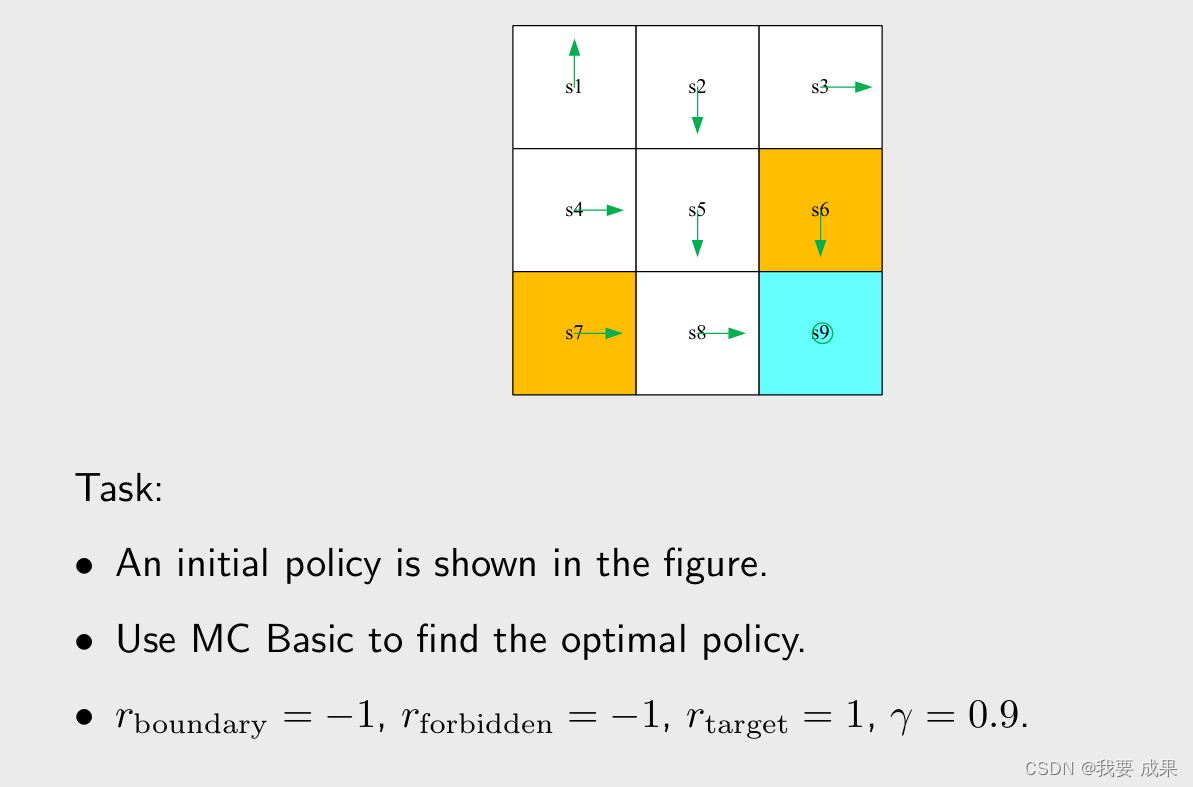
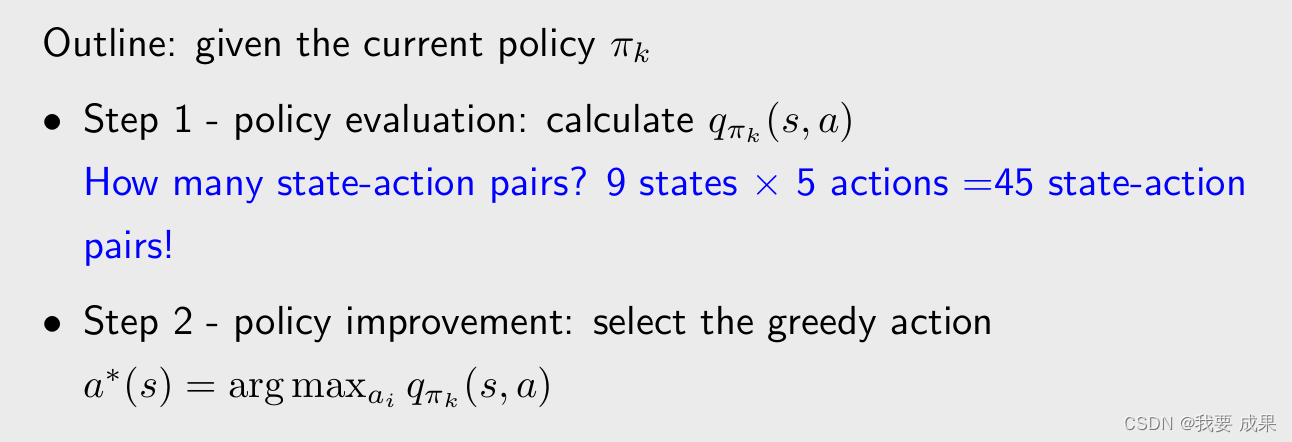
大纲: 给定当前策略 π k \pi_k πk
步骤1: 策略评估(policy evaluation):对任意的 s s s 和任意的 a,计算 q π k ( s , a ) q_{\pi_k}(s,a) qπk(s,a)
- 在这个例子中有 9 个 state,每个 state 对应 5 个 action,有 45 个 state-action pairs,所以要找到 45 个 q π k ( s , a ) q_{\pi_k}(s,a) qπk(s,a),假设从每一个 ( s , a ) (s,a) (s,a)出发都有 N 条轨迹,最后要求 N 条轨迹的平均的 return,那么一共有 45 × N 条轨迹。
步骤2: 策略改进(policy improvement)
- 在每个状态求出哪个 action 对应最大的 action value,就选择那个 action
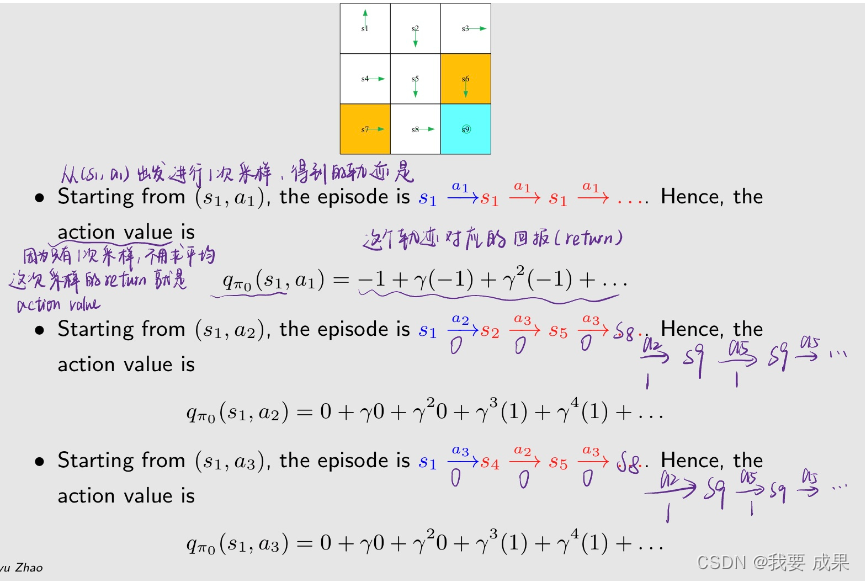
由于篇幅有限,我们不可能把 45 个 q π k q_{\pi_k} qπk 全部找到,我们只找 5 个,针对 s 1 s_1 s1 它的 5 个 action,只展示 q π k ( s , a ) q_{\pi_k}(s,a) qπk(s,a):
步骤1:策略评估(policy evaluation):
- 刚才提到,如果我从一个 ( s 1 , a 1 ) (s_1,a_1) (s1,a1)出发的话,要找 N 个轨迹,对这 N 条轨迹的 return 求平均,这样才能求出 q π k ( s 1 , a 1 ) q_{\pi_k}(s_1,a_1) qπk(s1,a1)。但是由于当前的问题很简单,当前的策略(policy)是确定性的(deterministic),当前的环境也是确定性的(deterministic),也就意味着,如果我从一个 ( s 1 , a 1 ) (s_1,a_1) (s1,a1)出发,不管采样多少次,最后得到的轨迹都是相同的,因此只采样一次就可以,因此只需 one episode 就能得到行动值!
- 如果在更复杂的情况下,policy 是随机的(stochastic);或者策略(policy)是确定性的(deterministic),但是环境是随机的(stochastic)。那么如果我从一个 ( s 1 , a 1 ) (s_1,a_1) (s1,a1)出发,采样不同次就会得到不同的轨迹,那么就需要无限多的事件(episodes)(或至少很多事件(episodes))!需要采样多次,然后求一个平均
理解:环境是随机的是什么意思?
- 环境的随机性体现在两个方面: 一方面采取某个action后到达的下一个state不是确定的; 另一方面采取某个action后获得的reward不是确定的
- 你可以理解为:从 s 1 s_1 s1出发,执行了 a 1 a_1 a1,结果不一定是 s 2 s_2 s2,也可能是 s 5 s_5 s5
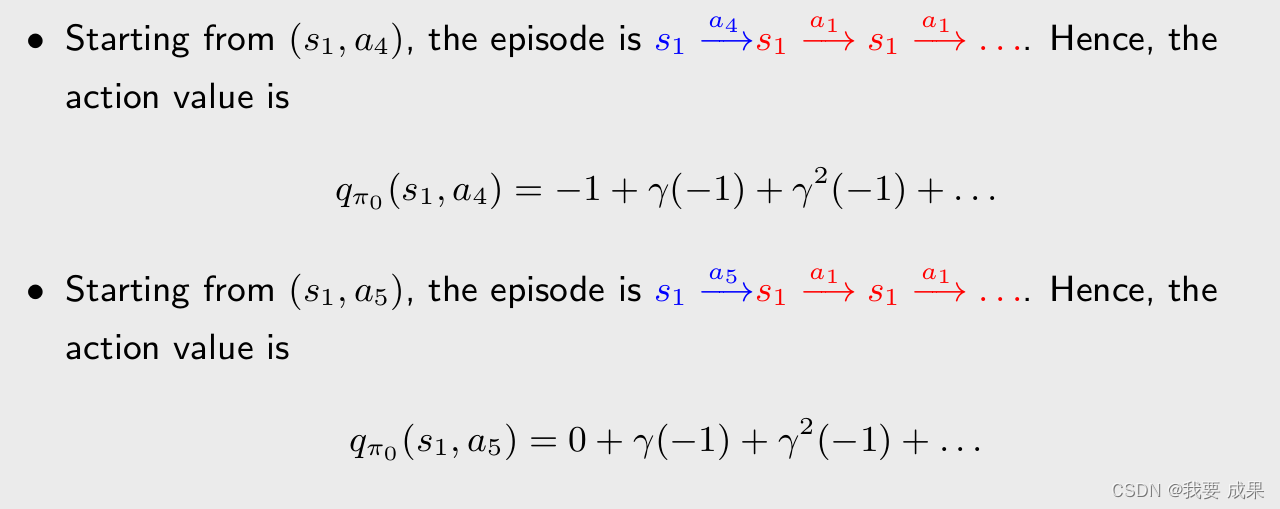
理解: a 5 a_5 a5这里为啥后面都是 − 1 -1 −1了,不应该待在原地都是0吗
回答:在 s 1 s_1 s1选择 a 5 a_5 a5 之后按照策略还是会“撞墙”,所以 q ( s 1 , a 5 ) q(s_1,a_5) q(s1,a5) 是如此
- s 1 s_1 s1产生 a 5 a_5 a5原地不动所以第一个reward是 =0,但是之后都按照 s 1 s_1 s1的policy(向上的action1),所以之后都是-1.
- 呆在原地不懂一次后,按照当前的策略(在 s 1 s_1 s1 向上走),就会不断向上走又弹回 s 1 s_1 s1,每一次奖励都是 − 1 -1 −1
理解: 不是还有一个求平均值的过程吗,谁踢我一下
- 因为这里的当前策略对于每一个状态来说都是确定的,比如在状态 s 2 s_2 s2,只可能往下走,而不可能往右走,所以无论采样多少次,得到的return都是一样的,所以只用采样一次,就不需要求平均了
- 这个是determinstic的,取样就一次,取平均就是除以1,还是自己
- 是有的,老师刚刚说了,由于我们环境是确定的,所以直接采样一次就行了
- 这个是确定的,因为 s 1 s_1 s1, a 1 a_1 a1对应的结果只有一种,所以采样只有一次,平均的分母 N = 1 N=1 N=1可以省略。如果 s 1 s_1 s1, a 1 a_1 a1对应的结果是变化的,那就需要进行多次采样然后求平均,这时候 N > 1 N>1 N>1就会显式表示平均的过程
- 因为都是确定性策略,所以相当于每个episode都是一样,相应的 q q q 也一样,均值就是它本身
- 这里只采样了一次,平均值就是这一条轨迹的值。
- 因为策略本身是确定好的,只是第一次因为qvalue的原因强行确定了一次visit
步骤2:策略改进(policy improvement)
比较一下
q
π
k
q_{\pi_k}
qπk 对应的 action value 哪个最大,这里
a
2
,
a
3
a_2,a_3
a2,a3 最大
q
π
0
(
s
1
,
a
2
)
=
q
π
0
(
s
1
,
a
3
)
q_{\pi_0}(s_1,a_2)=q_{\pi_0}(s_1,a_3)
qπ0(s1,a2)=qπ0(s1,a3)
因为他俩对应的 action value 是一样的,所以可以任意选择
a
2
,
a
3
a_2,a_3
a2,a3 作为一个新的策略,直观上来看,往右走和往下走也是一个比较好的策略
π
1
(
a
2
∣
s
1
)
=
1
o
r
π
1
(
a
3
∣
s
1
)
=
1
\pi_1(a_2|s_1)=1 \ \ or \ \ \pi_1(a_3|s_1)=1
π1(a2∣s1)=1 or π1(a3∣s1)=1
s
1
s_1
s1 的这个新策略已经实现最优了,对于这个简单的例子,一个 iteration 就可以找到实现它的最优策略。这是因为除了
s
1
s_1
s1 之外,
s
1
s_1
s1 周围的其他 state 已经达到最优了,所以
s
1
s_1
s1 也可以轻松找到最优策略。
(2)例子2
这个例子不是展示如何用 MC basic 解决一个问题而是假如已经用 MC Basic 得到了一个最优策略,分析一下这个最优策略有什么性质
研究 episode 长度的影响(Examine the impact of episode length):
- 在用 MC Basic 的时候需要数据,这个数据就是从任何一个状态和动作出发,有很多 episode,计算 episode 的 return。这个 episode 的长度理论上是越长越好,计算的 return 越精确,但现实中不能无限长,
- 那么 episode 的长度应该设置为多长才合适?
例子设置:

episode length 直观上可以理解为探索半径的长度
问题:一个episode的终止条件是什么,假如在当前的policy下无法达到目标点的话,由于Discounted不是会一直持续下去吗
- episode的长度是无穷的,需要我们手动终止
- 实际仿真的时候需要设置终止条件或者step最大值
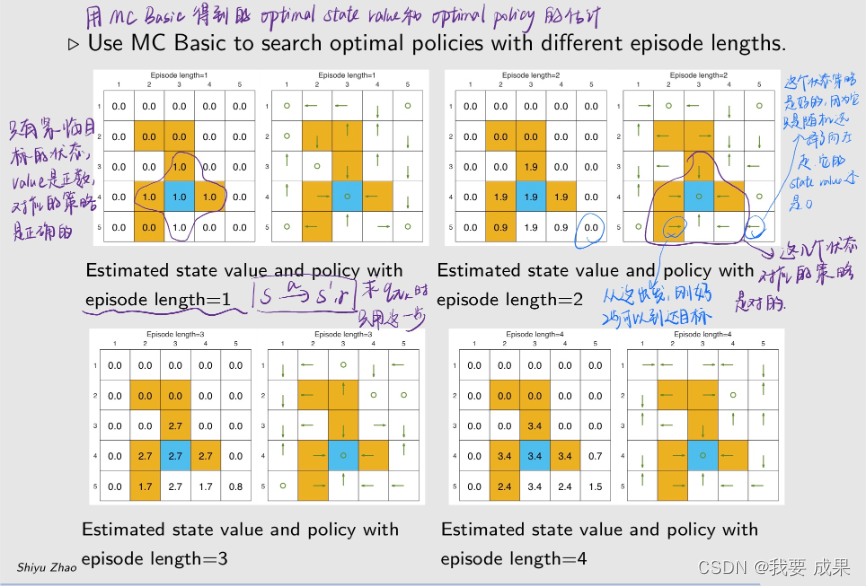
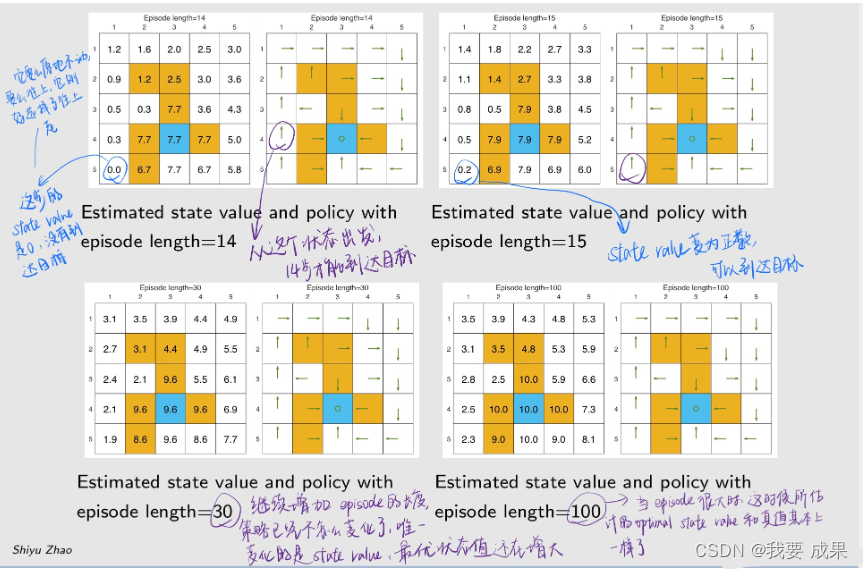
研究结果
- 当 episode 的长度较短时,只有靠近目标的状态具有非零状态值,只有离目标比较近的状态才能在这么短的步骤内找到目标,因此这些状态能找到最优策略。
- 随着 episode 的长度逐渐增加,离目标越来越远的状态也能慢慢到达目标,从而找到最优策略。距离目标较近的状态比距离目标较远的状态更早出现非零状态值。
- episode 的长度应足够长,让所有状态都能有机会到达目标。
- episode 的长度不一定要无限长,充分长就够了。
四.更高效地使用数据(Use data more efficiently):MC Exploring Starts
这个算法是 MC Basic 的推广,可以让算法变得更加高效
MC Basic 算法:
- 优点:清晰揭示核心思想!帮助我们理解怎么样用蒙特卡洛方法实现不需要模型的强化学习
- 缺点:过于简单,不实用,效率低。
- 不过,MC Basic 可以扩展得更有效。
考虑一个网格世界的例子,按照策略 π \pi π,我们可以得到 an episode,例如

**访问(Visit):**每当 episode 中出现一个状态-动作对(state-action pair)时,就称为对该状态-动作对的一次访问。
在 MC Basic 中使用数据的方法:初始访问法(Initial-visit method)
- 对于上图的这个 episode,我只考虑 ( s 1 , a 2 ) (s_1,a_2) (s1,a2),用剩下的得到的 return 来估计 ( s 1 , a 2 ) (s_1,a_2) (s1,a2)的 action value。
- 只需计算回报值并近似计算 q π ( s 1 , a 2 ) q_{\pi}(s_1,a_2) qπ(s1,a2)。
- MC Basic 算法就是这么做的。
- 缺点:不能充分利用数据,有很多数据被浪费了。
如何高效使用数据呢?
- 我理解,MC-basic中每个episode只能拿到估计q值的一个数据,现在对每条episode拆分后,一个episode就能拿到估计不同state-action pair的多条数据。这样就算是充分利用数据了
- 一个trajectory可出现多次相同的s a pair
- 这只是一个理论上提高数据利用率的改进的方法,还是要根据系统特点来看效果。如果研究对象系统状态转移非常稀疏,可能效果不好(利用不到几个片段),对于状态很容易循环的效果就可能很好
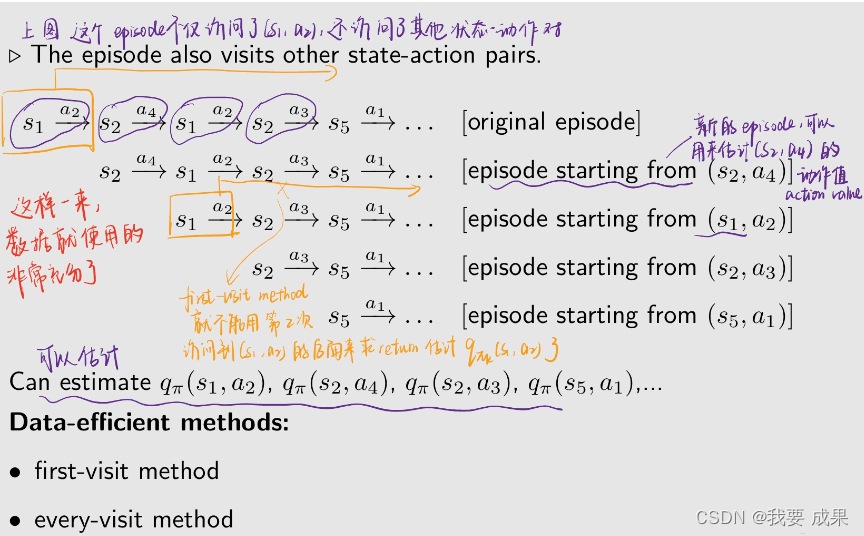
数据效率高的方法有两种:
-
first-visit method: 上图中,状态-动作对 ( s 1 , a 2 ) (s_1,a_2) (s1,a2) 访问了两次,而 first-visit method 只使用第一次访问 ( s 1 , a 2 ) (s_1,a_2) (s1,a2)的后面来估计 ( s 1 , a 2 ) (s_1,a_2) (s1,a2),第二次出现的时候就不用它后面的来进行估计了。
-
every-visit method: 上图中,状态-动作对 ( s 1 , a 2 ) (s_1,a_2) (s1,a2)访问了两次(第一次和第三次),every-visit method 只要访问了,不管是第几次,都可以用它后面的 return 估计 ( s 1 , a 2 ) (s_1,a_2) (s1,a2)的 action value
理解:还是没懂first-visit和every-visit区别?
就是你估计时,对于episode里出现多次的 ( s , a ) (s,a) (s,a),是把第一个 ( s , a ) (s,a) (s,a)当作样本,还是把后面的 ( s , a ) (s,a) (s,a)对都算作 ( s , a ) (s,a) (s,a)样本
除了让数据的使用更加高效之外,我们还可以更加高效的去更新策略。基于 MC 的 RL 的另一个方面是何时更新策略。也有两种方法:
第一种方法是, 在策略评估(policy evaluation)步骤中,收集从一个状态-行动对(state-action pair)出发的所有 episode,然后使用平均回报(average return)来近似估计动作值(action value)。
- 这是 MC Basic 算法所采用的方法。
- 这种方法的问题在于,智能体必须等到(wait until)所有 episode 都收集完毕。这个等待的过程浪费时间,效率低。
第二种方法是, 使用单个 episode 的回报(return)来立刻估计动作值(action value),然后不要等待,下一步就直接开始改进策略。这样的话,我得到一个 episode 就改进策略,得到一个 episode 就改进策略,效率会提升。
第二种方法会产生问题吗?
- 有人可能会说,单个 episode 的回报(return)无法准确地估计出相应的动作值(action value)。
- 事实上,在上一章介绍的截断策略迭代算法(truncated policy iteration algorithm)中,我们已经做到了这一点,在 truncated policy iteration algorithm 中的第一步做的是 policy evaluation,在那一步中要求出当前策略的 state value,求 state value 要求解贝尔曼公式,又需要无穷多步迭代,当时在那个算法中我们只做有限步迭代,虽然得不到非常精确的 state value,但这个算法仍然可行。与现在这个思想类似,用一个 episode 来估计动作值(action value),这显然是不精确的,但是没关系。
这一些方法有名字,叫做 Generalized policy iteration(简称 GPI)
- GPI 不是一种特定的算法,是一大类算法,是一种思想,架构。
- 它指的是在策略评估(policy-evaluation)和策略改进(policy-improvement)过程之间切换的总体思路或框架。而且策略评估(policy-evaluation)不需要非常精确的把 action value 或者 state value 估计出来。
- 许多基于模型和无模型的 RL 算法都属于 GPI 这一框架。上节课和这节课的算法都可以属于 GPI 框架。
有了上面的这些思考,如果我们能更高效地利用数据和更新估计值,就能得到一种新算法,即 MC Exploring Starts,这是我们之前学的 MC Basic 的推广
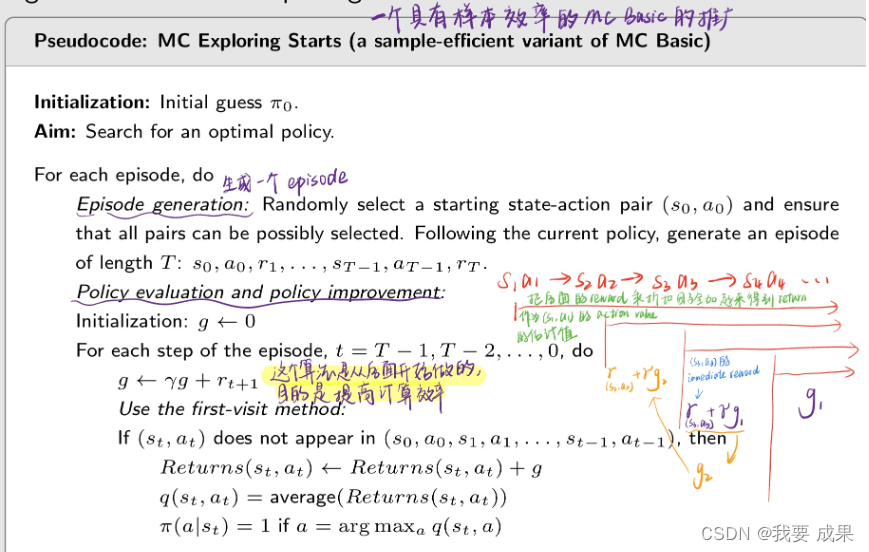
什么是探索起始(exploring starts)?
- 探索(exploring) 指的是我从每一个 ( s , a ) (s,a) (s,a)出发,都要有 episode,只有这样我才能用后面生成的这些 reward 来估计 return,进一步估计 action value。如果恰恰有一个 state-action 没有被访问到,那我就可能把这个 action 给漏掉了,但是那个可能就是最优的,所以我们需要确保每个都被访问。
- 起始(starts) 意味着我们要访问每个
(
s
,
a
)
(s,a)
(s,a),从它后面能够生成 reward 的这些数据有两种方法:
- 第一种方法是从每一个 ( s , a ) (s,a) (s,a)开始都有一个 episode,就是 start;
- 第二种方法是从其他的 ( s , a ) (s,a) (s,a)开始,但是也能经过当前的这个 ( s , a ) (s,a) (s,a),那后面的这些数据也可以估计当前 ( s , a ) (s,a) (s,a) 的 return,这个叫 visit。
- 目前来讲,visit 方法没法确保,它依赖于策略和环境,没法确保从其他的 ( s , a ) (s,a) (s,a) 开始一定能够经过剩下的所有 ( s , a ) (s,a) (s,a),下面我们介绍的新方法就是使得 visit 可以做到,这样就可以避免必须从每个 ( s , a ) (s,a) (s,a) 都开始的条件。
- MC Basic 和 MC exploring starts 都需要这一假设。
为什么我们需要考虑探索起始(exploring starts)?
- 从理论上讲,只有对**每个状态(state)的每个动作值(action value)**都进行了充分的探索,我们才能正确地选择最优动作(optimal actions)。相反,如果没有探索某个动作,这个动作可能恰好是最优动作,从而被错过。
- 在实践中,探索起始(exploring starts)是很难实现的。对于许多应用,尤其是涉及与环境物理交互的应用,很难收集到从每一对状态-行动开始的 episode。
因此,理论与实践之间存在差距。
我们能否取消探索起始(exploring starts)的要求呢?接下来,我们将通过软策略(soft policies)来证明这一点。
五.MC 没有探索就启动(MC without exploring starts ):Algorithm: MC ε-Greedy
1.算法介绍
由上面的思考,引出了第五部分,如何把 exploring starts 这个条件给去掉,这里给出了一个算法叫 MC ε-Greedy
什么是 soft policy?
- 如果采取任何动作的概率都是正数,对每一个 action 都有可能去做选择,那么该政策就是软性的。
- policy 分为两种:
- 一种是确定性的(deterministic)policy,之前讲的 greedy policy 就是deterministic;
- 另一种是随机性的(stochastic),这里的 soft policy 包括后面要介绍的 ε-Greedy 都是 stochastic policy
为什么要引入 soft policy?
- 如果采用软策略,如果我从一个 state-action pair 比如说 ( s , a ) (s,a) (s,a) 出发,如果后面的 episode 特别长,因为它是探索性的,我能够确保任何一个 s 和 a 都能被这个 episode 访问到。一些足够长的 episodes 就可以访问每一个状态-行动对。
- 这样,我们就不需要从每个状态-行动对开始的大量 episodes 了。因此,可以取消探索起始(exploring starts)的要求。不需要从每一个 ( s , a ) (s,a) (s,a) 都出发了,只需要从一个或者几个出发,就能够覆盖到其他的。
我们使用的是什么 soft policy?
- ε-greedy policies(除了这个还有其他软策略,当前使用的是这个而已)
什么是 ε-greedy policy?
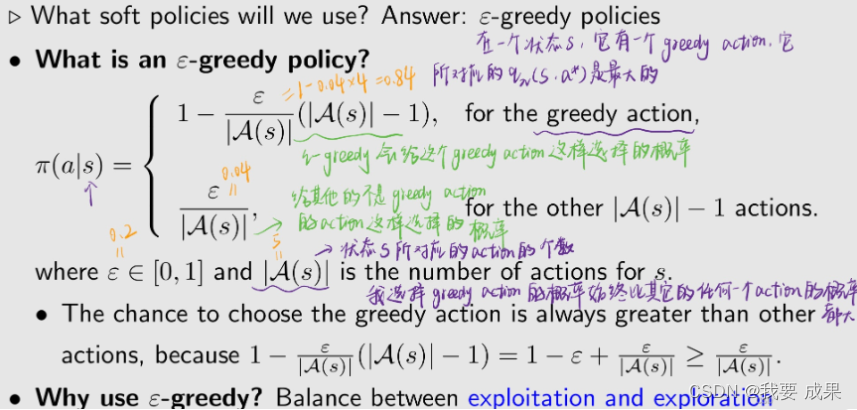
为什么使用 ε-greedy policy?
- 平衡开发(或者叫充分利用)(exploitation)与探索(exploration)
- 充分利用 exploitation: 比如我在一个状态,有很多 action,我知道里面有的 action 的 action value 比较大,那么我知道这些信息,下一时刻我就应该去采取那个 action,那么未来我相信我就能得到更多的 reward
- 探索(exploration): 我现在虽然知道那个 action 能够带来更多的 reward,但是也许现在的信息不完备,我应该去探索一下其他的 action,执行完之后可能发现其他的 action 的 action value 可能也是非常好的
如何将 ε-greedy 嵌入基于 MC 的 RL 算法(基于蒙特卡洛的强化学习算法)?如何将两者结合?
**最初,**MC Basic 和 MC Exploring Starts 中的策略改进(policy improvement)步骤是求解下面的式子:(在第一步求解出了
q
π
k
(
s
,
a
)
q_{\pi_k} (s,a)
qπk(s,a),这一步要求解下面这个优化问题得到一个新的策略)
π
k
+
1
(
s
)
=
a
r
g
max
π
∈
∏
∑
a
π
(
a
∣
s
)
q
π
k
(
s
,
a
)
\pi_{k+1}(s) = arg \ \max \limits_{\pi \in {\color{blue}\prod} }\sum_a \pi(a|s)q_{\pi_k}(s,a)
πk+1(s)=arg π∈∏maxa∑π(a∣s)qπk(s,a)
之前我们没有强调过,但其实我们在求解这个优化问题的时候,
π
\pi
π 应该在所有可能的策略当中去做选择,其中,
∏
\prod
∏ 表示所有可能策略组成的集合。这里求解出的最优策略是:
上面的是我们之前的方法,现在要把 ε-greedy 嵌入基于 MC 的 RL 算法:
现在, 策略改进(policy improvement)步骤改为求解
π
k
+
1
(
s
)
=
a
r
g
max
π
∈
∏
ε
∑
a
π
(
a
∣
s
)
q
π
k
(
s
,
a
)
\pi_{k+1}(s) = arg \ \max \limits_{{\color{blue}\pi \in \prod_{\varepsilon } } }\sum_a \pi(a|s)q_{\pi_k}(s,a)
πk+1(s)=arg π∈∏εmaxa∑π(a∣s)qπk(s,a)
在求解上面这个问题的时候,我不是在所有的策略里面去找,只是在
∏
ε
\prod_{\varepsilon}
∏ε 里面去找。其中,
∏
ε
\prod_{\varepsilon }
∏ε 表示具有固定 ε 值的所有 ε-greedy 策略的集合(这里 ε 是事先给定的)。
这时候所得到的最优策略是:(把最大的概率仍然给 greedy action,但是会给其他所有 action 都给一个相同的比较小的概率)
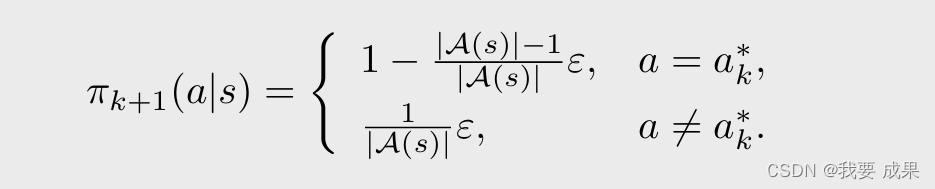
- 这样我们就得到了 MC ε-greedy 的算法,MC ε-Greedy 与 MC Exploring Starts 相同,只是前者使用 ε-greedy 策略,后者使用 greedy 策略。
- 它不需要探索起点(exploring starts)这样的一个条件,但仍需要以不同的形式访问所有的状态-动作对。
伪代码:

2.例子
(1)讨论 ε-greedy 的探索性:
一个 episode 能访问所有状态-行动对吗?Can a single episode visit all state-action pairs?
当 ε = 1 时,策略是均匀分布(uniform distribution)的,在我们的例子里面每一个状态有 5 个 action,每一个 action 都给了 0.2 的概率(由上面那个图片的最后一个公式可以计算出来)。当 ε = 1 ε = 1 ε=1 时,探索能力(exploration ability)最强。
看图 (a),从一点出发,根据策略要生成一个 episode,如果只有 100 步(episode有100步) 的话,图 (a) 是它探索的情况,探索到了不少的 state;
如果有1000步,图 (b) 可知,所有的 state 和 action 都被探索到了;
如果有10000步,探索的次数会更大;
图 (d) 是探索100万步的时候,每一个 state-action pair 被访问的次数,横轴代表 state-action pair 的索引,共有25个状态,每个状态有 5 个 action,所以一共有 125 个 state-action pair,这时候虽然只有一个 episode,但是每个 state-action pair 都被访问了很多次。
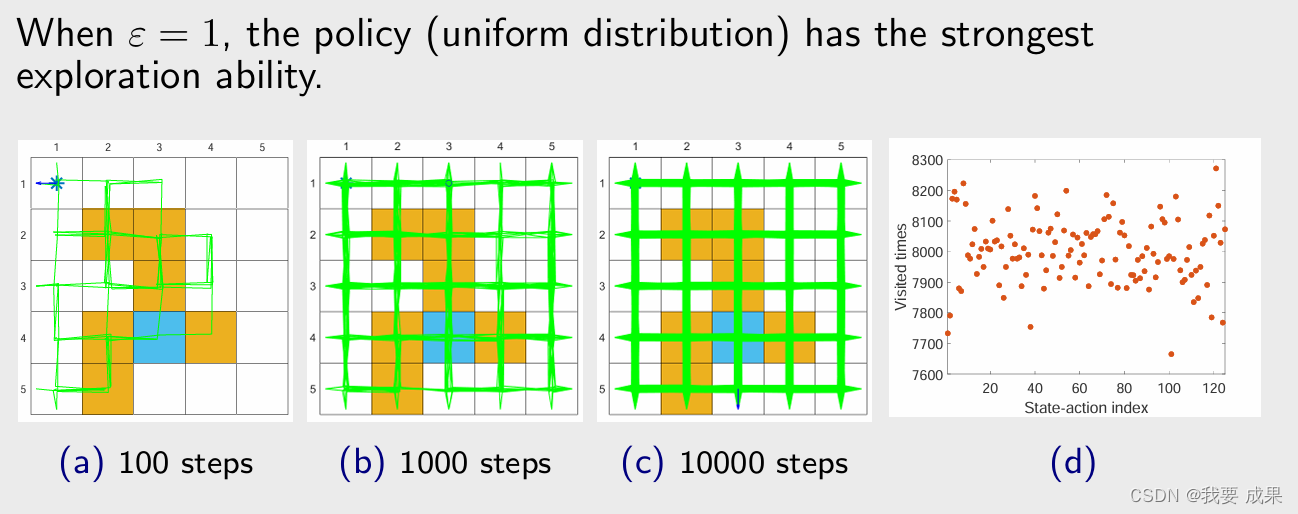
这个例子说明了,当 ε 比较大的时候,探索性比较强,自然就不再需要用 exploring starts 这样的一个条件了,不需要从每一个 ( s , a ) (s,a) (s,a) 出发都有一个 episode,只需要从某一些 ( s , a ) (s,a) (s,a)出发,我就能覆盖到其它所有的 ( s , a ) (s,a) (s,a)。
当 ε 较小时,策略的探索能力(exploration ability)也较小。
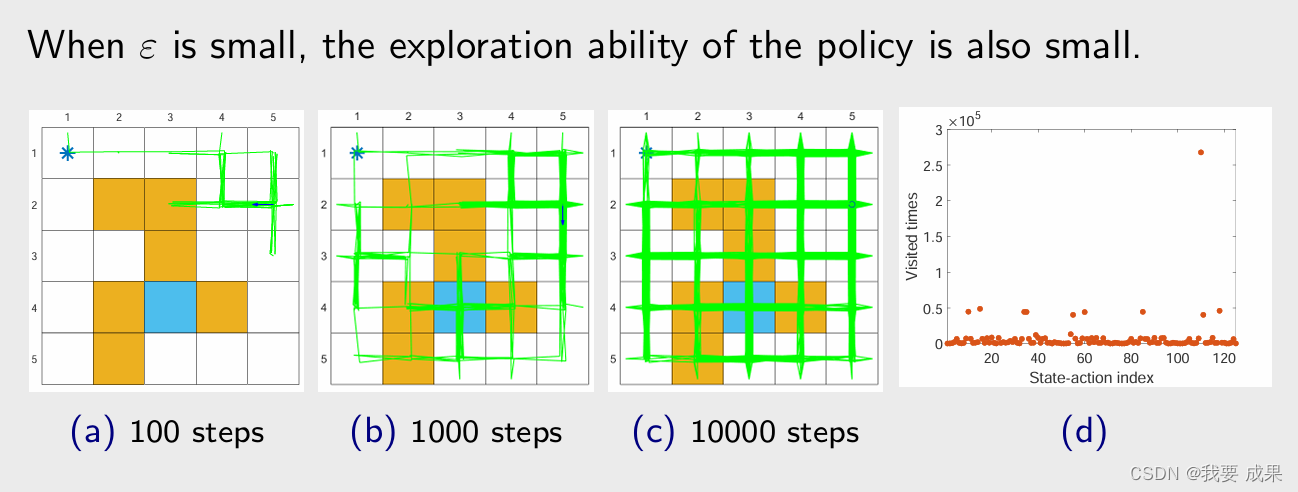
图 (a),步数比较小的时候,访问的 state 比较少,因为它的偏好比较强;即使我把 episode 的长度变成了 100 万步,他会呈现出非常不均匀的访问次数,有的 state value 被访问的次数多,有的少。不管怎么样,相比 greedy 来说,还是有一定的探索能力。
下面用 MC ε-Greedy 算法实验一个例子:
运行 MC ε-Greedy 算法如下。在每次迭代中(In every iteration),执行下面的:
- 在 episode 生成步骤中,使用先前的 ε-Greedy 策略生成一个 episode,这个 episode 非常长,有一百万步!
- 在其余步骤中,使用这一个 episode 更新所有的 state-action pair 它们相对应的 action value 和更新策略。
- 之所以这样做,是想通过这个例子展示一下这个算法避开了 exploring starts 这样的一个条件,因为只要这个 episode 足够长,即使它从一个 state-action pair 出发,但仍然能够访问其他所有的 state-action pair。
- 两次迭代可以得到最优的 ε-Greedy 策略
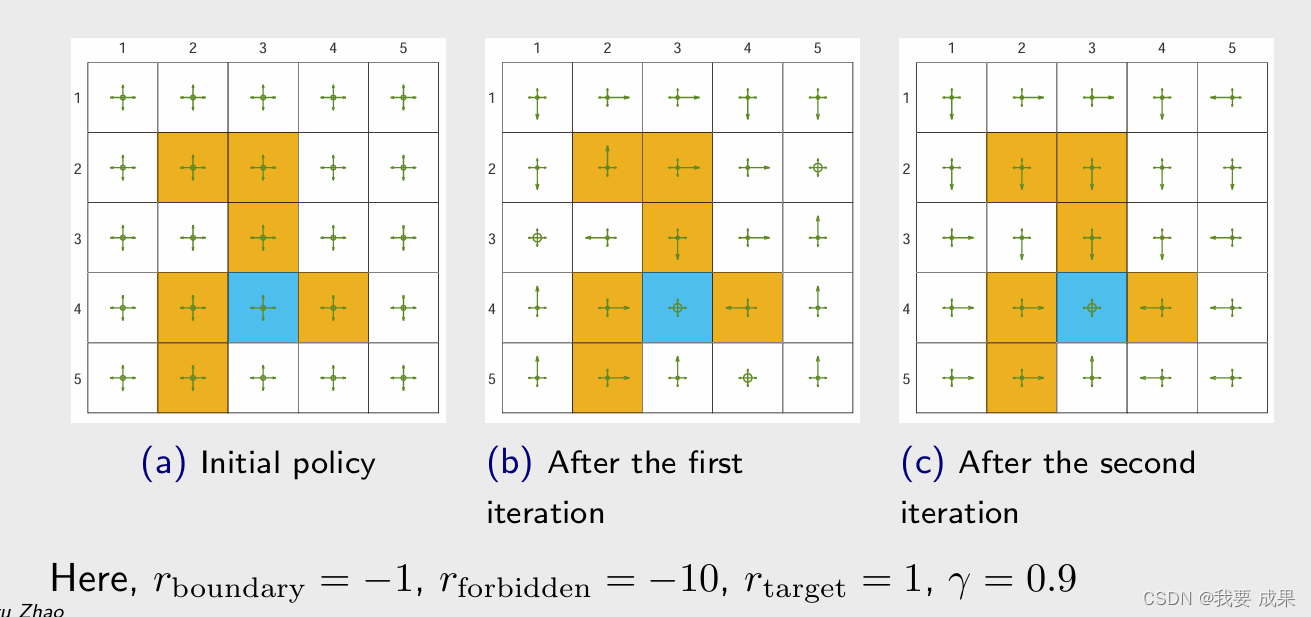
- 图 (a) 是最初的策略,这个策略是不好的,在每一个状态都有相同的概率去选择所有的 action。然后我用这样一个策略生成一个 100 万步长的 episode,然后更新策略,得到了图 (b) 这样的策略;这个策略仍然不够好,一些状态上会保持不动;然后再用这个策略得到一个 100 万步长的 episode,再去更新策略,就得到了图 © 这样的策略。
- 我们看图 © 这样的策略,如果只看图上绿色箭头概率最大的 action(箭头最长的方向),比图 (b) 策略来说相对而言比较合理,从任何一点出发都能到达目标,但是它们会穿过障碍物,所以从这个意义上讲它还不是最优的,因为最优的应该绕过障碍物到达目标。所以 ε-Greedy 通过探索性得到了一些好处,但是牺牲掉了最优性。
与贪婪策略(greedy policy)相比
- ε-greedy 策略的优势在于它们具有更强的探索能力,因此不需要探索开始(exploring starts)的条件。
- 缺点是 ε-greedy 策略一般来说不是最优的(not optimal)(我们只能证明总是存在最优的 greedy 策略)。
- 实际中可以设置应该比较小的 ε 值,当这个 ε 趋于 0 的时候,ε-greedy 就接近于 greedy,所以用这个算法找到的最优的 ε-greedy 策略就接近于最优的 greedy 策略;在实际中也可以让 ε 逐渐减小,比如在开始的时候 ε 比较大,就有比较强的探索能力,然后让 ε 逐渐趋于 0,最后得到的策略又又比较好的最优性。
- MC ε-greedy 算法给出的最终策略只有在所有 ε-greedy 策略的集合 Πε 中才是最优的。
- ε不能太大。
下面我们用几个例子说明一下 ε-greedy 的最优性

在下面的例子中,首先给出左图绿色箭头的一个策略,然后求解它的贝尔曼公式,可以得到它的 state value(右图)。

- 左上角第一幅图的 ε = 0 ε = 0 ε=0,它是一个 greedy 的策略,并且它是在这个情况下最优的一个策略。
- 右上角的第二幅图 ε = 0.1 ε = 0.1 ε=0.1,是第二个策略,第二个策略与第一个策略的关系是,他们是一致的(consistent),因为左下角那个小格子上,第一幅图中是往上走,第二幅图中最大的概率(最长的绿色箭头)是往上走,但与从同时也给其他的 action 有一些比较小的概率(小箭头),这个就被称为 consistent,这时候使用左图策略算出的 state value 比第一幅图的小,就是因为在很多地方它采取了不该采取的措施。
- consistent: 右上角的第二幅图 ε = 0.1 ε = 0.1 ε=0.1,是第二个策略,第二个策略与第一个策略的关系是,他们是一致的(consistent),因为在第二幅图的左图中的任意一个状态中,箭头最长的策略(具有最大概率的策略)和第一幅图左图的策略一样。
- 进一步增大 ε,state value 变得更小,我们知道 state value 可以用来衡量一个策略是否好,最优策略的定义就是基于 state value,最优策略是有最大的 state value
- 因此虽然所有策略都和最优的 greedy 策略保持一致(绿色箭头一样),但最优性变得越来越差
- 实际上 target area 上的 state value 在最优的策略里,应该是最大的值,但当 ε 比较大的时候,它反而变成最小的值,变成负数,因为它在这个地方有比较大的概率进入 forbidden area,得到很多对负数 reward。
下面例子说明 MC ε-Greedy 算法中 ε 的选择不能太大。或者最开始的时候 ε 比较大,探索性比较强,最后 ε 逐渐减小到 0,就可以得到一个最优的策略

- 左上角第一幅图的 ε = 0 ε = 0 ε=0,它是一个 greedy 的策略,并且它是在这个情况下最优的一个策略。
- 用 MC ε-Greedy 得到的 optimal ε-Greedy 策略,得到这个策略之后要用到实际中,实际中不会带有 ε(即右上角的左图不会有小箭头了,只保留概率最大的策略,即只保留大箭头),会把它转成对应的 greedy 策略,这个转换成的 greedy 策略,我希望它与最优策略(左上角的左图策略)相同,即我们希望是具有 一致性的(consistent) 。在 ε = 0.1 ε=0.1 ε=0.1 的时候,把它转成 greedy 的时候与左上角左图相同,就是 greedy 的策略。但当 ε = 0.2 ε=0.2 ε=0.2 或更大的时候,ε-Greedy 策略与左上角的 greedy 策略无关了,转换过去(即只取最长的箭头,不要小箭头)他俩就不同了
- 因此如果你想用 MC ε-Greedy的话,那么你的 ε 选择不能太大。或者用一个技巧,在最开始的时候 ε 比较大,探索性比较强,最后 ε 逐渐减小到 0,就可以得到一个最优的策略