一、概述
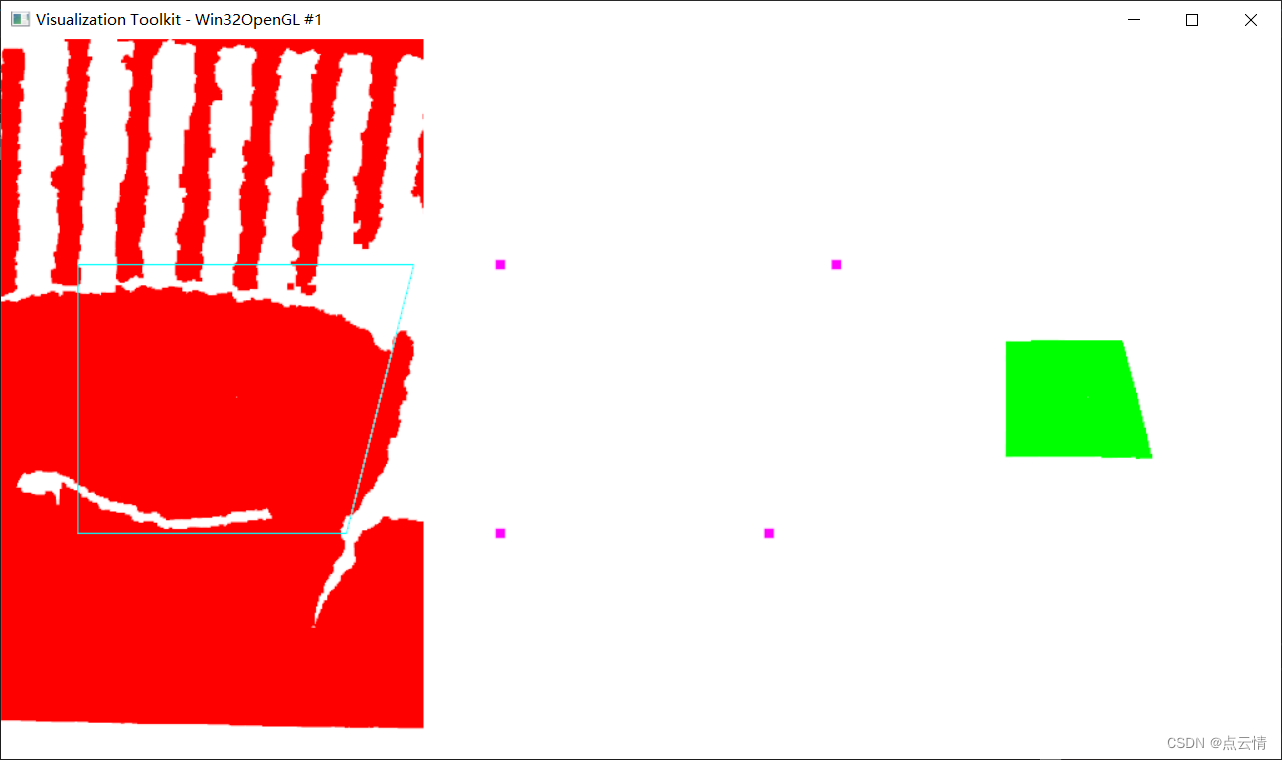
提取多边形内部的点。
二、代码
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/crop_hull.h>
#include <pcl/surface/concave_hull.h>
#include <pcl/surface/convex_hull.h>
#include <pcl/visualization/cloud_viewer.h>
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);//加载点云数据
pcl::PCDReader reader;
reader.read("pig2.pcd", *cloud);
pcl::PointCloud<pcl::PointXYZ>::Ptr bound(new pcl::PointCloud<pcl::PointXYZ>); //创建多边形区域指针
bound->push_back(pcl::PointXYZ(0.1, 0.1, 0)); //根据顶点坐标创建区域
bound->push_back(pcl::PointXYZ(0.1, -0.1, 0));
bound->push_back(pcl::PointXYZ(-0.1, 0.1, 0));
bound->push_back(pcl::PointXYZ(-0.1, -0.1, 0));
bound->push_back(pcl::PointXYZ(0.15, 0.1, 0));
pcl::ConvexHull<pcl::PointXYZ> hull; //建立一个凸包对象
hull.setInputCloud(bound); //输入设置好的凸包范围
hull.setDimension(2); //设置凸包的维度
std::vector<pcl::Vertices> polygons; //设置动态数组用于保存凸包顶点
//设置点云用于描述凸包的形状
pcl::PointCloud<pcl::PointXYZ>::Ptr surface_hull(new pcl::PointCloud<pcl::PointXYZ>);
hull.reconstruct(*surface_hull, polygons); //计算凸包结果
pcl::PointCloud<pcl::PointXYZ>::Ptr objects(new pcl::PointCloud<pcl::PointXYZ>);
pcl::CropHull<pcl::PointXYZ> crop; //创建CropHull对象
crop.setDim(2); //设置维度
crop.setInputCloud(cloud); //设置输入点云
crop.setHullIndices(polygons); //输入封闭多边形的顶点
crop.setHullCloud(surface_hull); //输入封闭多边形的形状
crop.filter(*objects); //执行CropHull滤波并存储相应的结果
std::cout << "Cloud after crop has:" << objects->size() << " data points." << std::endl;
//初始化共享指针用于进行可视化
boost::shared_ptr<pcl::visualization::PCLVisualizer> view(new pcl::visualization::PCLVisualizer("crophull display"));
view->setBackgroundColor(255, 255, 255);
//利用多视口输出可视化结果
int v1(0);
view->createViewPort(0.0, 0.0, 0.33, 1, v1);
view->setBackgroundColor(255, 255, 255, v1);
view->addPointCloud(cloud, "cloud", v1);
view->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1, 0, 0, "cloud");
view->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "cloud");
view->addPolygon<pcl::PointXYZ>(surface_hull, 0, .069 * 255, 0.2 * 255, "backview_hull_polyLine1", v1);
int v2(0);
view->createViewPort(0.33, 0.0, 0.66, 1, v2);
view->setBackgroundColor(255, 255, 255, v2);
view->addPointCloud(surface_hull, "surface_hull", v2);
view->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1, 0, 1, "surface_hull");
view->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 8, "surface_hull");
view->addPolygon<pcl::PointXYZ>(surface_hull, 0, .069 * 255, 0.2 * 255, "backview_hull_polyLine1", v2);
int v3(0);
view->createViewPort(0.66, 0.0, 1, 1, v3);
view->setBackgroundColor(255, 255, 255, v3);
view->addPointCloud(objects, "objects", v3);
view->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 1, 0, "objects");
view->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "objects");
while (!view->wasStopped())
{
view->spinOnce(1000);
}
system("pause");
return 0;
}