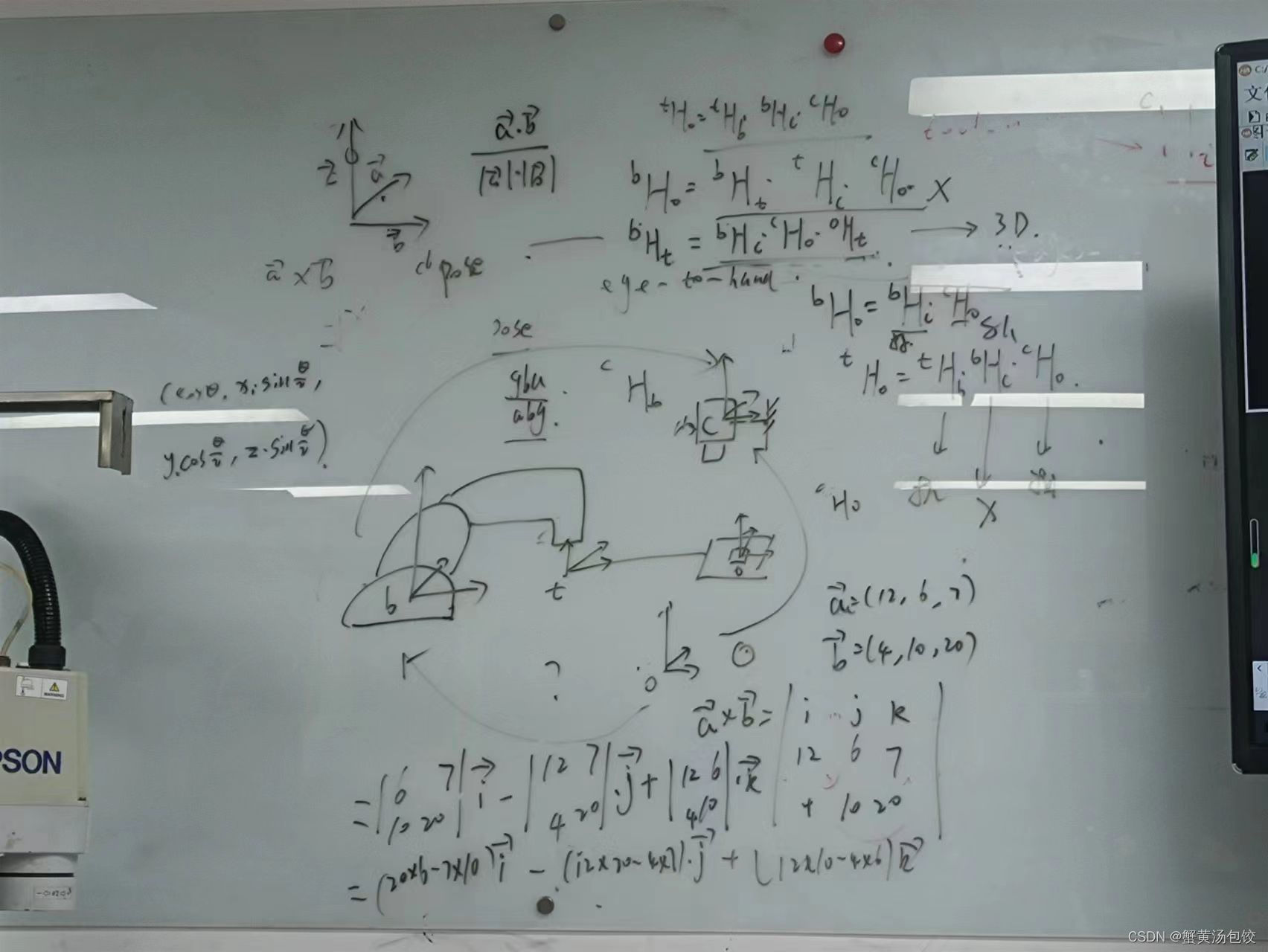
眼在手上:
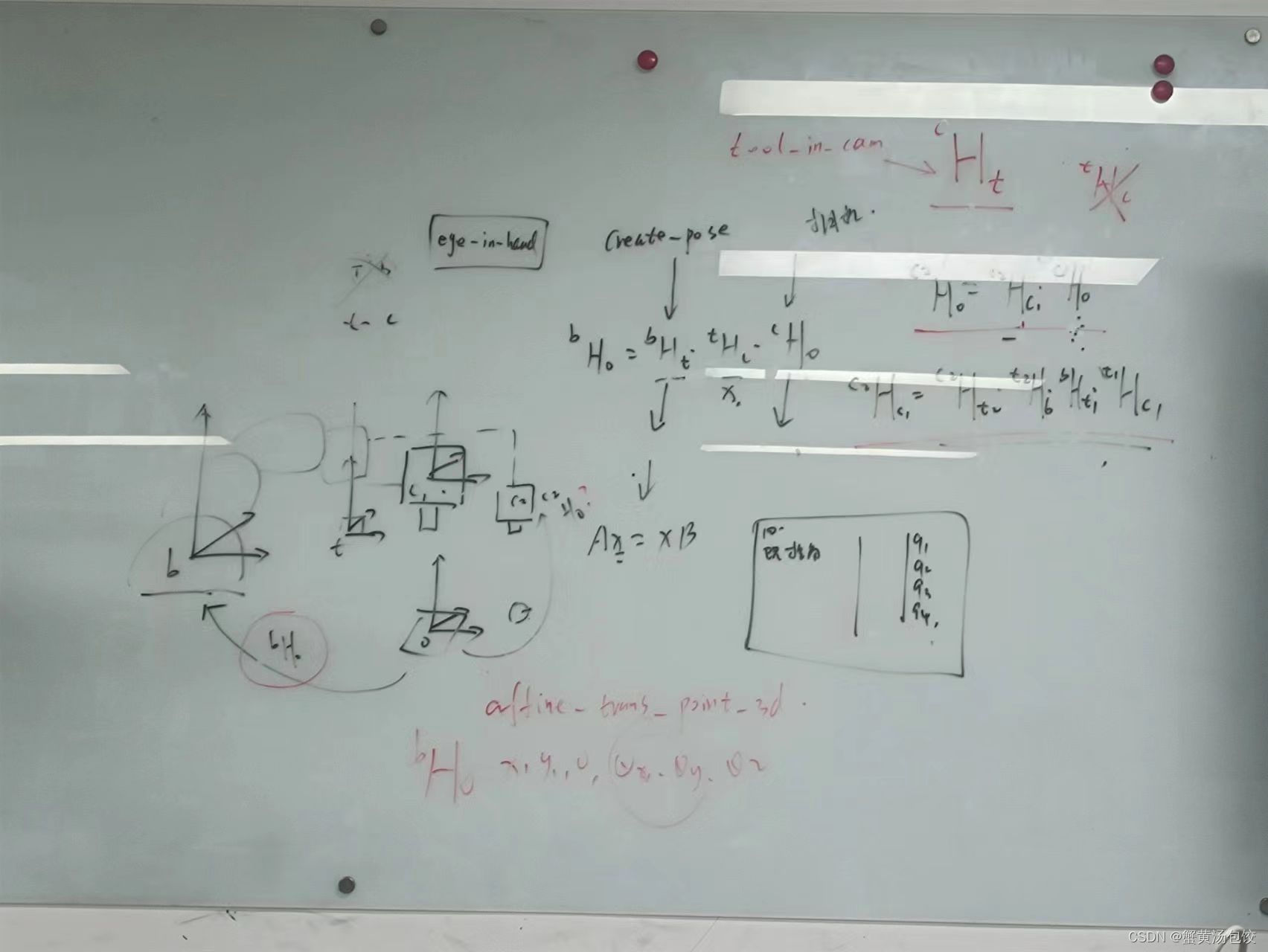
寻找T-C关系 tool和相机的关系
标定板大小占据视野小
机器人:四元素(Q1 Q2 Q3 Q4) 欧拉角(Tx Ty Tz Rx Ry Rz)
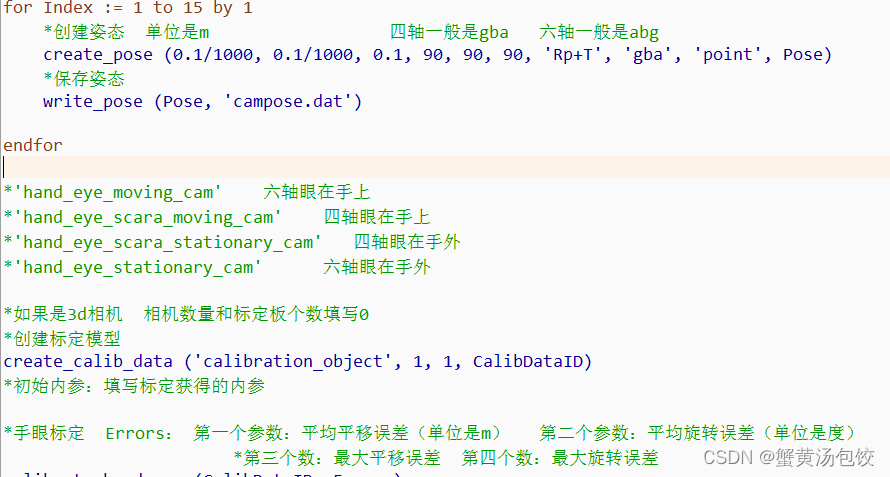
1.生成标定板的描述文件
2.标定助手,标定采集一张
标定注意事项:
a.如果是六轴 选择俩个不正交的轴(标定的时候六个轴都可以动)
b.如果是四轴:相邻俩次角度要尽量的大---取极性最好相反(一正一负)(标定的时候Z轴建议不要动)
c.平移量要小
d.尽量让标定板在中心部分,少在边缘处
f.机器人本身的误差影响
保存所有标定的图像
错误原因分析:标定误差 矩阵填错了 模式问题 gba模式 abg模式
高度有变化:单标外参 更换配套的内外参
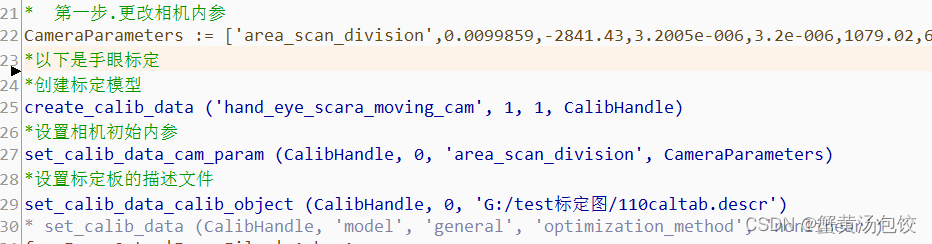
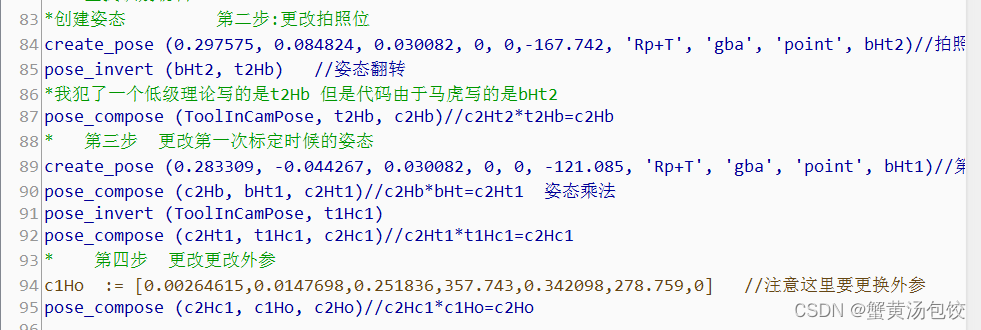
第一步.更改相机内参
第二步:更改拍照位
第三步 更改第一次标定时候的姿态
第四步 更改更改外参
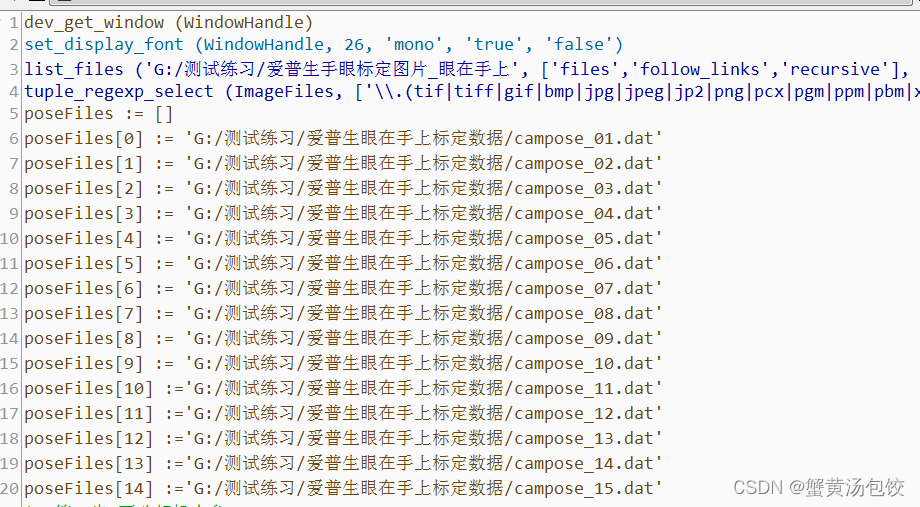
halcon采集助手,采集图像
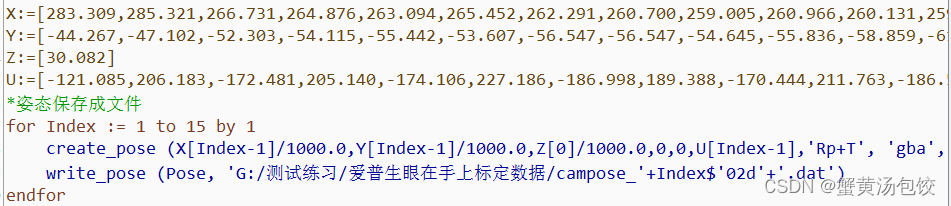
1.创建姿态,保存姿态
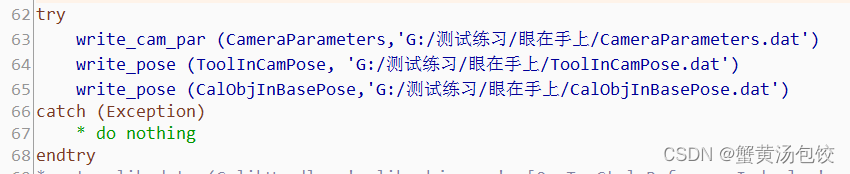
2.获得内外参,保存内外参

3.读入保定时,保存的图片,以及姿态
4.更改相机内参,创建标定模型,设置相机初始内参,标定板描述文件
循环查找标定板
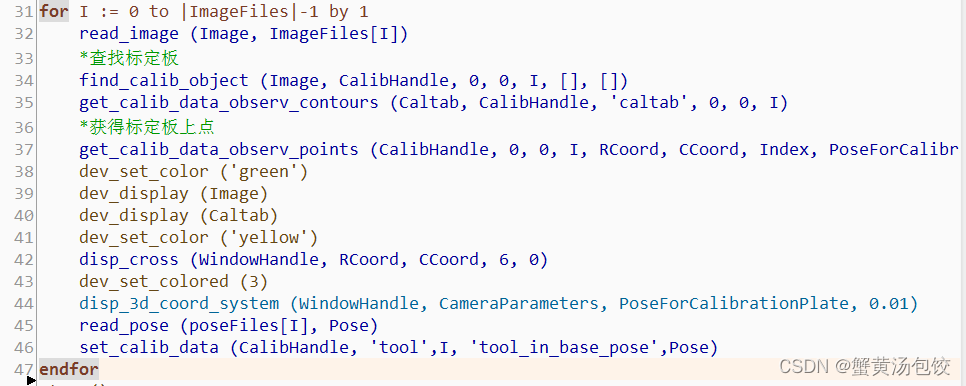
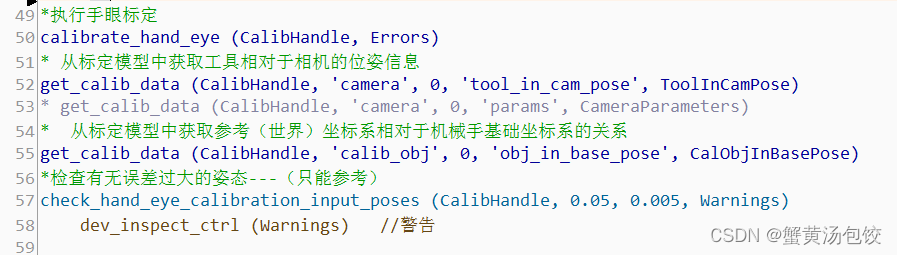
5.执行手眼标定--获得根据工具坐标相对于相机的位姿信息
可以用check_hand_eye_calibration_input_poses 检查有无误差过大的姿态
保存姿态
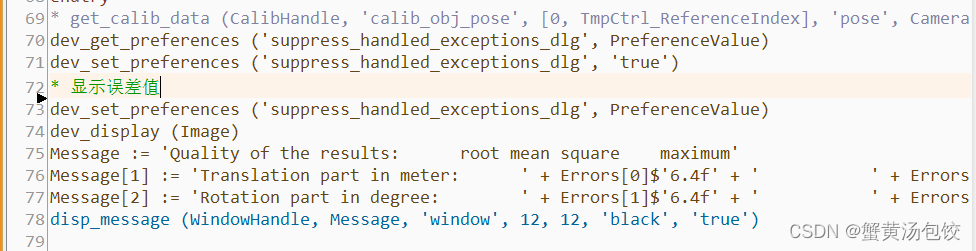
显示误差
创建姿态,姿态乘法
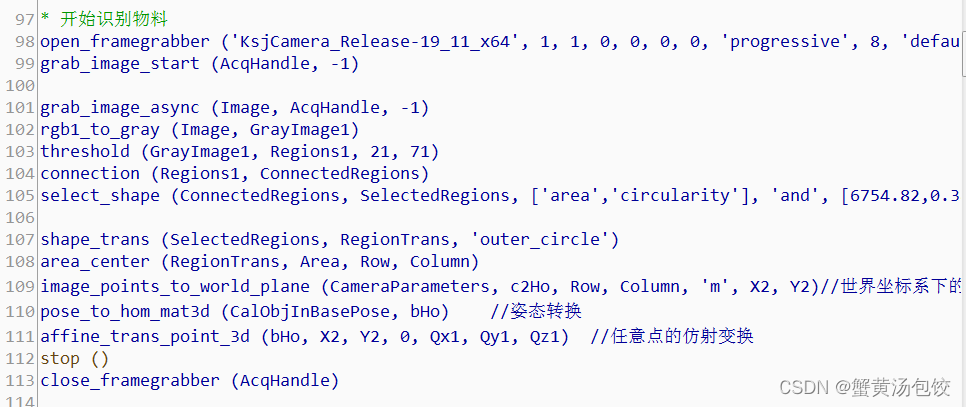
6.拍照识别--可以在任意位置拍照识别
发送给机器人的坐标数据是Qx1 Qy1
眼在手外:
求b-c关系,机器人base坐标系与相机坐标系的关系。
因为标定的时候是标定板放在机器人工具坐标系,识别的时候在在最底下,高度发生率变化,所以需要单独标定拍照识别时候的外参。注意这里内外参搭配使用。