https://blog.csdn.net/litt1e/article/details/128804663
yolo的优缺点
https://wenku.csdn.net/answer/6t0v21vok6
YOLOV8是一种目标检测算法,它在YOLO系列的基础上进行了改进和优化。以下是YOLO V8的优缺点:
优点:1.高速度:YOLOV8采用单阶段的检测方法,将目标检测任务转化为一个回归问题,因此速度非常快,适用于实时应用场景。
⒉.较高的准确率: YOLO V8在YOLO系列的基础上进行了改进,通过引入更多的技术手段,如特征金字塔网络、注意力机制等,提升了检测的准确率。
3.多尺度检测: YOLO V8能够在不同尺度下进行目标检测,可以检测到不同大小的目标。
4.简单易用: YOLO V8的网络结构相对简单,易于理解和实现,对于初学者来说比较友好。
缺点:
1.相对较大的模型尺寸:为了提高准确率,YOLO V8引入了更多的技术手段和网络结构,导致模型尺寸相对较大,需要更多的计算资源和存储空间。
⒉对小目标检测效果较差:由于YOLOV8采用了多尺度检测的策略,对于小目标的检测效果相对较差,容易出现漏检或误检的情况。
3.对密集目标的处理不佳:YOLOV8在处理密集目标时可能会出现重叠框的问题,导致检测结果不准确。
RT-detr和detr的区别
RT-DETR和DETR都是目标检测领域的模型,它们之间的区别主要在于实时性和度方面。
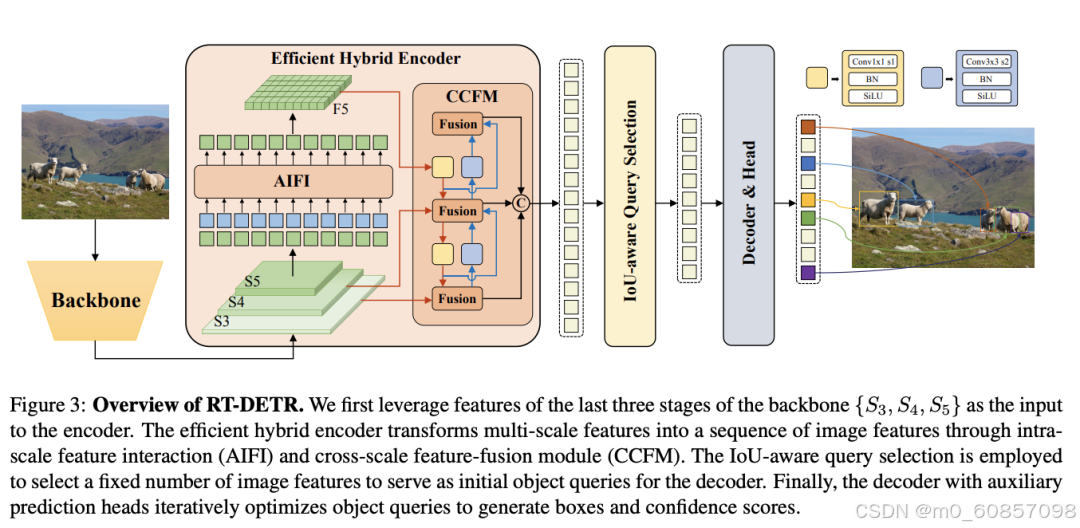
RTDETR是实时目标检测器Real-Time DETR)的简称,它是对DETR模型的改进,旨在提高目标检测的实时性能。RT-DE通过减少模型的计算量和优化网络结构,使得在保持较高准确的同时,能够在实时场景进行目标检测。相比于DETR,RT-DETR在速度上有了明显的提升。
DETR是一种基于Transformer的端到端目标检测模型,它通过将目标检测任务转化为一个序列到序列的问题来解决。DETR不需要使用传统的锚框或者候选框,而是直接从输入图像中预测目标的位置和类别。这种端到端的设计使得DETR具有较好的准确性和可解释性。
RT-detr和yolo的比较
《DETRs Beat YOLOs on Real-time Object Detection》https://arxiv.org/abs/2304.08069
https://github.com/PaddlePaddle/PaddleDetection/tree/develop/configs/rtdetr
同级别下RT-DETR比所有的YOLO都更高,而且这还只是RT-DETR训练72个epoch的结果,先前精度最高的YOLOv8都是需要训500个epoch的,其他YOLO也基本都需要训300epoch,这个训练时间成本就不在一个级别了,对于训练资源有限的用户或项目是非常友好的。
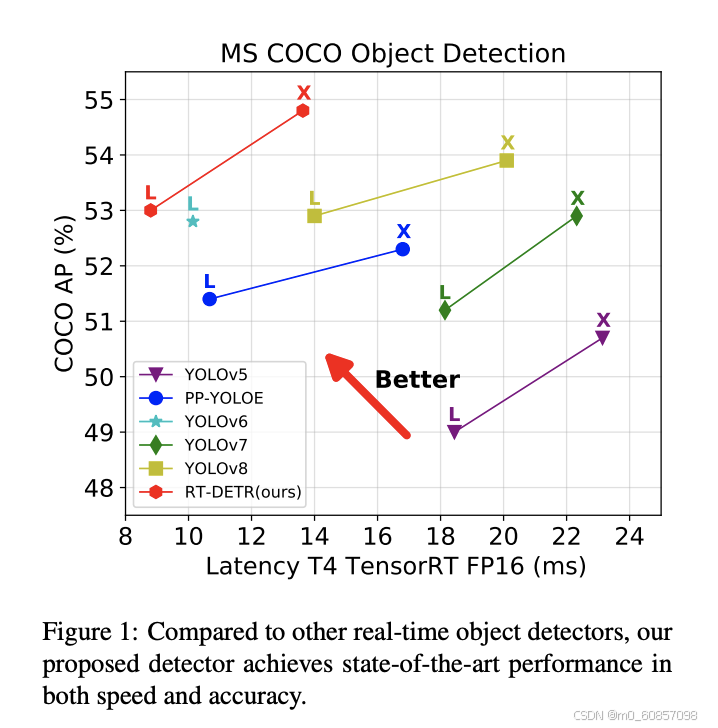
DETR类在COCO上常用的尺度都是800x1333,以往都是以Res50 backbone刷上45 mAP甚至50 mAP为目标,而RT-DETR在采用了YOLO风格的640x640尺度情况下,也不需要熬时长训几百个epoch 就能轻松突破50mAP,精度也远高于所有DETR类模型。此外值得注意的是,RT-DETR只需要300个queries,设置更大比如像DINO的900个肯定还会更高,但是应该会变慢很多意义不大。
关于速度:
来看下RT-DETR和各大YOLO和DETR的速度对比:
(1)对比YOLO系列:
首先纯模型也就是去NMS后的速度上,RT-DETR由于轻巧的设计也已经快于大部分YOLO,然后实际端到端应用的时候还是得需要加上NMS的...嗯等等,DETR类检测器压根就不需要NMS,所以一旦端到端使用,RT-DETR依然轻装上阵一路狂奔,而YOLO系列就需要带上NMS负重前行了,NMS参数设置的不好比如为了拉高recall就会严重拖慢YOLO系列端到端的整体速度。
(2)对比DETR系列:
其实结论是显而易见的,以往DETR几乎都是遵循着800x1333尺度去训和测,这个速度肯定会比640尺度慢很多,即使换到640尺度训和测,精度首先肯定会更低的多,而其原生设计庞大的参数量计算量也注定了会慢于轻巧设计的RT-DETR。RT-DETR的轻巧快速是encoder高效设计、通道数、encoder数、query数等方面全方位改良过的。
目标检测方法分类的主要依据
①一阶段or二阶段;②有锚框or无锚框;③有nms or无nms;④CNN or Transformer;⑤;⑥
评价目标检测方法性能的主要指标
①精度;②速度;③模型大小;④资源消耗;⑤小目标检测能力;⑥密集目标检测能力;⑦泛化能力
目标检测算法的框架:
R-CNN 系列:如 R-CNN、Fast R-CNN、Faster R-CNN、Mask R-CNN 等。
YOLO 系列:如 YOLOv1、YOLOv2、YOLOv3、YOLOv4 等。
SSD 系列:如 SSD、DSSD、RetinaNet 等。
FCN 系列:如 FCN、SegNet、DeepLab 等。
目标检测的技术:
区域建议网络 (RPN):用于生成候选框的网络。
特征金字塔:用于处理不同尺度的特征。
注意力机制:用于提升模型对重要区域的关注。
多尺度检测:通过多个尺度的特征图来检测不同大小的目标。