内容介绍
点云数据中总会出现点分布不均匀的情况,可以通过下采样来使得点数据分别更平均,有利于曲面重构等后续处理,PCL自带的VoxelGrid(体素栅格)可以很好的完成这一任务,主要就是创建一个三维体素栅格(就是每个比较小的立方体组成的体素栅格)。在每个体素(三维立方体)里面,求取该立方体内的所有点云重心点来代表这个立方体的表示,以此达到下采样的目的。
代码
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <thread>
#include <chrono>
#include <pcl/filters/voxel_grid.h>
#include <pcl/surface/mls.h>
int main(int argc, char** argv)
{
// 创建点云对象
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
// 从PCD文件中读取点云数据
if (pcl::io::loadPCDFile<pcl::PointXYZ>("1.pcd", *cloud) == -1) // 请将"input.pcd"替换为你的点云文件路径
{
PCL_ERROR("Couldn't read file input.pcd\n");
return (-1);
}
pcl::VoxelGrid<pcl::PointXYZ> vg;
vg.setInputCloud(cloud);
vg.setLeafSize(20.0f, 20.0f, 20.0f); // 设置体素大小
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_smoothed(new pcl::PointCloud<pcl::PointXYZ>);
vg.filter(*cloud_smoothed);
// 创建可视化对象
pcl::visualization::PCLVisualizer::Ptr viewer0(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer0->setBackgroundColor(0, 0, 0);
viewer0->addPointCloud<pcl::PointXYZ>(cloud, "original cloud");
viewer0->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
viewer->addPointCloud<pcl::PointXYZ>(cloud_smoothed, "sample cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");
//viewer->addCoordinateSystem(1.0);
//viewer->initCameraParameters();
// 启动可视化
while (!viewer->wasStopped())
{
viewer0->spinOnce(100);
viewer->spinOnce(100);
std::this_thread::sleep_for(std::chrono::milliseconds(100));
}
return 0;
}
运行效果
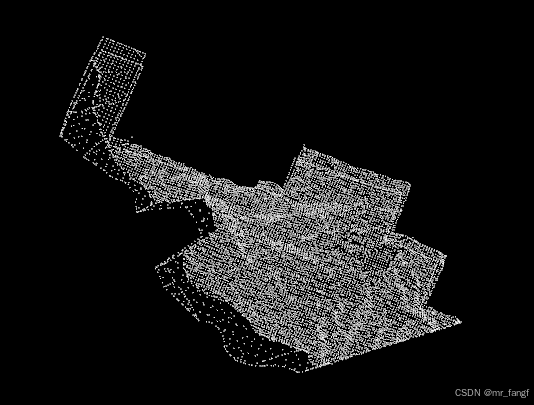
可以看到原数据上层有很明显的稀疏部分:
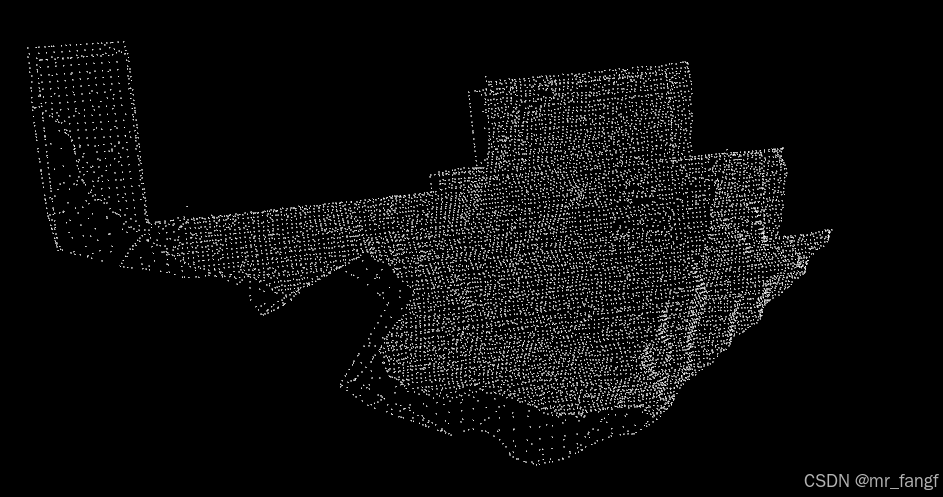
运行代码后效果变好了很多:
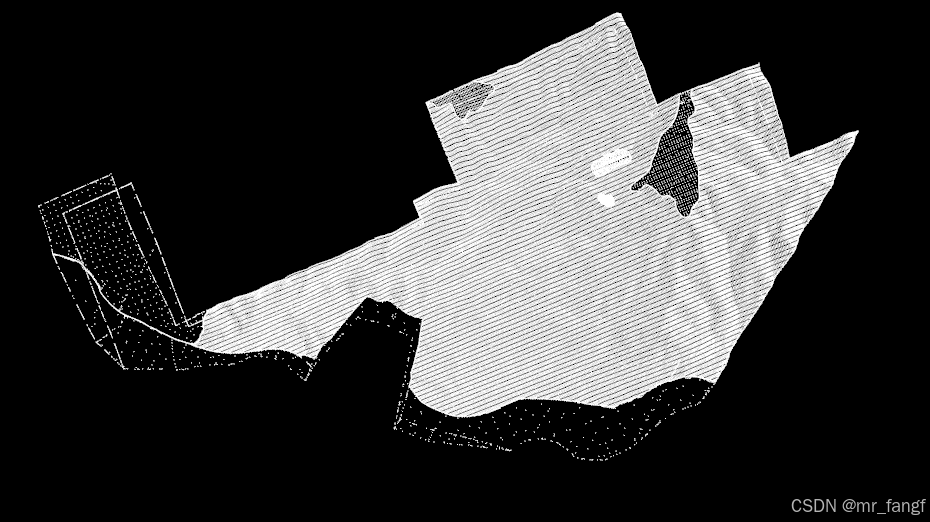
经过处理后的数据在曲面重构等后续操作时效果会更好。