动手强化学习(七):DQN 改进算法——Dueling DQN
文章转于 伯禹学习平台-动手学强化学习 (强推)
本文所有代码均可在jupyter notebook运行
与君共勉,一起学习。
更多Ai资讯:公主号AiCharm
1. 简介
在之前的内容中,我们学习了基于值函数的方法(DQN)和基于策略的方法(REINFORCE),其中基于值函数的方法只学习一个价值函数,而基于策略的方法只学习一个策略函数。那么一个很自然的问题,有没有什么方法既学习价值函数,又学习策略函数呢?答案就是 Actor-Critic。Actor-Critic 是一系列算法,目前前沿的很多高效算法都属于 Actor-Critic 算法,今天我们将会介绍一种最简单的 Actor-Critic 算法。需要明确的是,Actor-Critic 算法本质上是基于策略的算法,因为这系列算法都是去优化一个带参数的策略,只是其中会额外学习价值函数来帮助策略函数的学习。
2. Actor-Critic 算法
我们回顾一下在 REINFORCE 算法中,目标函数的梯度中有一项轨迹回报,来指导策略的更新。而值函数的概念正是基于期望回报,我们能不能考虑拟合一个值函数来指导策略进行学习呢?这正是 Actor-Critic 算法所做的。让我们先回顾一下策略梯度的形式,在策略梯度中,我们可以把梯度写成下面这个形式:
g
=
E
[
∑
t
=
0
∞
ψ
t
∇
θ
log
π
θ
(
a
t
∣
s
t
)
]
g=\mathbb{E}\left[\sum_{t=0}^{\infty} \psi_{t} \nabla_{\theta} \log \pi_{\theta}\left(a_{t} \mid s_{t}\right)\right]
g=E[t=0∑∞ψt∇θlogπθ(at∣st)]
其中
ψ
t
\psi_{t}
ψt 可以有很多种形式:
- ∑ t = 0 ∞ γ t r t ′ \sum_{t=0}^{\infty} \gamma^{t} r_{t^{\prime}} ∑t=0∞γtrt′ : 轨迹的总回报 $\quad
- ∑ t ′ = t ∞ γ t ′ − t r t ′ \sum_{t^{\prime}=t}^{\infty} \gamma^{t^{\prime}-t} r_{t^{\prime}} ∑t′=t∞γt′−trt′ : 动作 a t a_{t} at 之后的回报
- ∑ t ′ = t ∞ r t ′ − b ( s t ) \sum_{t^{\prime}=t}^{\infty} r_{t^{\prime}}-b\left(s_{t}\right) ∑t′=t∞rt′−b(st) : 基准线版本的改进
- Q π θ ( s t , a t ) : Q^{\pi_{\theta}}\left(s_{t}, a_{t}\right): Qπθ(st,at): 动作价值函数
- $ \cdot A^{\pi_{\theta}}\left(s_{t}, a_{t}\right)😒 优势函数
- r t + γ V π θ ( s t + 1 ) − V π θ ( s t ) r_{t}+\gamma V^{\pi_{\theta}}\left(s_{t+1}\right)-V^{\pi_{\theta}}\left(s_{t}\right) rt+γVπθ(st+1)−Vπθ(st) : 时序差分残差
在 REINFORCE 的最后部分,我们提到了 REINFORCE通过蒙特卡洛采样的方法对梯度的估计是无偏的,但是方差非常大,我们可以用第三种形式引入基线 (baseline)
b
(
s
t
b\left(s_{t}\right.
b(st ) 来减小方差。此外我们也可以采用 Actor-Critic 算法,估计 一个动作价值函数
Q
Q
Q 来代替蒙特卡洛采样得到的回报,这便是第 4 种形式。这个时候,我们也可以把状态价值函数
V
作为基线,从偍牧
V \mathrm{~ 作 为 基 线 , 从 偍 牧}
V 作为基线,从偍牧 但是用神经网络进行估计的方法可以减小方差、提高鲁棒性。除此之外,REINFORCE 算法基于蒙特卡洛采样,只能在序列结束后进行更新,而 Actor-Critic 的方法则可以在每一步之后都进行更新。
我们将 Actor-Critic 分为两个部分: 分别是 Actor (策略网络) 和 Critic (价值网络):
- Critic 要做的是通过 Actor 与环境交互收集的数据学习一个价值函数,这个价值函数会用于帮助 Actor 进行更新策略。
- Actor 要做的则是与环境交互,并利用 Ctitic 价值函数来用策略梯度学习一个更好的策略。
L ( ω ) = 1 2 ( r + γ V ω ( s t + 1 ) − V ω ( s t ) ) 2 \mathcal{L}(\omega)=\frac{1}{2}\left(r+\gamma V_{\omega}\left(s_{t+1}\right)-V_{\omega}\left(s_{t}\right)\right)^{2} L(ω)=21(r+γVω(st+1)−Vω(st))2
与 DQN 中一样,我们采取类似于目标网络的方法,上式中
r
+
γ
V
ω
(
s
t
+
1
)
r+\gamma V_{\omega}\left(s_{t+1}\right)
r+γVω(st+1) 作为时序差分目标,不会产生梯度来更新价值函数。所以价值函数的梯度为
∇
∗
ω
L
(
ω
)
=
−
(
r
+
γ
V
∗
ω
(
s
∗
t
+
1
)
−
V
∗
ω
(
s
∗
t
)
)
∇
∗
ω
V
−
ω
(
s
t
)
\nabla * \omega \mathcal{L}(\omega)=-(r+\gamma V * \omega(s * t+1)-V * \omega(s * t)) \nabla * \omega V_{-} \omega\left(s_{t}\right)
∇∗ωL(ω)=−(r+γV∗ω(s∗t+1)−V∗ω(s∗t))∇∗ωV−ω(st)
然后使用梯度下降方法即可。接下来让我们总体看看 Actor-Critic 算法的流程吧!
- 初始化策略网络参数 θ \theta θ ,价值网络参数 ω \omega ω
- 不断进行如下循环 (每个循环是一条序列) :
。 用当前策略 π θ \pi_{\theta} πθ 平样轨 迹 { s 1 , a 1 , r 1 , s 2 , a 2 , r 2 … } \left\{s_{1}, a_{1}, r_{1}, s_{2}, a_{2}, r_{2} \ldots\right\} {s1,a1,r1,s2,a2,r2…}
。 为每一步数据计算: δ t = r t + γ V ω ( s t + 1 ) − V ω ( s ) \delta_{t}=r_{t}+\gamma V_{\omega}\left(s_{t+1}\right)-V_{\omega}(s) δt=rt+γVω(st+1)−Vω(s)
。 更新价值参数 w = w + α ω ∑ t δ t ∇ ω V ω ( s ) w=w+\alpha_{\omega} \sum_{t} \delta_{t} \nabla_{\omega} V_{\omega}(s) w=w+αω∑tδt∇ωVω(s)
。 更新策略参数 θ = θ + α θ ∑ t δ t ∇ θ log π θ ( a ∣ s ) \theta=\theta+\alpha_{\theta} \sum_{t} \delta_{t} \nabla_{\theta} \log \pi_{\theta}(a \mid s) θ=θ+αθ∑tδt∇θlogπθ(a∣s)
好了!这就是 Actor-Critic 算法的流程啦,让我们来用代码实现它看看效果如何吧!
3. Actor-Critic 代码实践
我们仍然在 Cartpole 环境上进行 Actor-Critic 算法的实验。
import gym
import torch
import torch.nn.functional as F
import numpy as np
import matplotlib.pyplot as plt
import rl_utils
定义我们的策略网络 PolicyNet,与 REINFORCE 算法中一样。
class PolicyNet(torch.nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim):
super(PolicyNet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim)
self.fc2 = torch.nn.Linear(hidden_dim, action_dim)
def forward(self, x):
x = F.relu(self.fc1(x))
return F.softmax(self.fc2(x),dim=1)
Actor-Critic 算法中额外引入一个价值网络,接下来的代码定义我们的价值网络 ValueNet,输入是状态,输出状态的价值。
class ValueNet(torch.nn.Module):
def __init__(self, state_dim, hidden_dim):
super(ValueNet, self).__init__()
self.fc1 = torch.nn.Linear(state_dim, hidden_dim)
self.fc2 = torch.nn.Linear(hidden_dim, 1)
def forward(self, x):
x = F.relu(self.fc1(x))
return self.fc2(x)
再定义我们的 ActorCritic 算法。主要包含采取动作和更新网络参数两个函数。
class ActorCritic:
def __init__(self, state_dim, hidden_dim, action_dim, actor_lr, critic_lr, gamma, device):
self.actor = PolicyNet(state_dim, hidden_dim, action_dim).to(device)
self.critic = ValueNet(state_dim, hidden_dim).to(device) # 价值网络
self.actor_optimizer = torch.optim.Adam(self.actor.parameters(), lr=actor_lr)
self.critic_optimizer = torch.optim.Adam(self.critic.parameters(), lr=critic_lr) # 价值网络优化器
self.gamma = gamma
def take_action(self, state):
state = torch.tensor([state], dtype=torch.float)
probs = self.actor(state)
action_dist = torch.distributions.Categorical(probs)
action = action_dist.sample()
return action.item()
def update(self, transition_dict):
states = torch.tensor(transition_dict['states'], dtype=torch.float)
actions = torch.tensor(transition_dict['actions']).view(-1, 1)
rewards = torch.tensor(transition_dict['rewards'], dtype=torch.float).view(-1, 1)
next_states = torch.tensor(transition_dict['next_states'], dtype=torch.float)
dones = torch.tensor(transition_dict['dones'], dtype=torch.float).view(-1, 1)
td_target = rewards + self.gamma * self.critic(next_states) * (1 - dones) # 时序差分目标
td_delta = td_target - self.critic(states) # 时序差分误差
log_probs = torch.log(self.actor(states).gather(1, actions))
actor_loss = torch.mean(-log_probs * td_delta.detach())
critic_loss = torch.mean(F.mse_loss(self.critic(states), td_target.detach())) # 均方误差损失函数
self.actor_optimizer.zero_grad()
self.critic_optimizer.zero_grad()
actor_loss.backward() # 计算策略网络的梯度
critic_loss.backward() # 计算价值网络的梯度
self.actor_optimizer.step() # 更新策略网络参数
self.critic_optimizer.step() # 更新价值网络参数
定义好 Actor 和 Critic,我们就可以开始实验了,看看 Actor-Critic 在 Cartpole 环境上表现如何吧!
actor_lr = 1e-3
critic_lr = 1e-2
num_episodes = 1000
hidden_dim = 128
gamma = 0.98
device = torch.device("cuda") if torch.cuda.is_available() else torch.device("cpu")
env_name = 'CartPole-v0'
env = gym.make(env_name)
env.seed(0)
torch.manual_seed(0)
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
agent = ActorCritic(state_dim, hidden_dim, action_dim, actor_lr, critic_lr, gamma, device)
return_list = rl_utils.train_on_policy_agent(env, agent, num_episodes)
----------------------------------------------------------------------------------------------Iteration 0: 100%|██████████| 100/100 [00:00<00:00, 218.65it/s, episode=100, return=21.100]
Iteration 1: 100%|██████████| 100/100 [00:01<00:00, 95.81it/s, episode=200, return=72.800]
Iteration 2: 100%|██████████| 100/100 [00:02<00:00, 45.96it/s, episode=300, return=109.300]
Iteration 3: 100%|██████████| 100/100 [00:05<00:00, 12.55it/s, episode=400, return=163.000]
Iteration 4: 100%|██████████| 100/100 [00:08<00:00, 11.24it/s, episode=500, return=193.600]
Iteration 5: 100%|██████████| 100/100 [00:08<00:00, 11.11it/s, episode=600, return=195.900]
Iteration 6: 100%|██████████| 100/100 [00:08<00:00, 11.88it/s, episode=700, return=199.100]
Iteration 7: 100%|██████████| 100/100 [00:08<00:00, 11.77it/s, episode=800, return=186.900]
Iteration 8: 100%|██████████| 100/100 [00:08<00:00, 11.23it/s, episode=900, return=200.000]
Iteration 9: 100%|██████████| 100/100 [00:08<00:00, 11.22it/s, episode=1000, return=200.000]
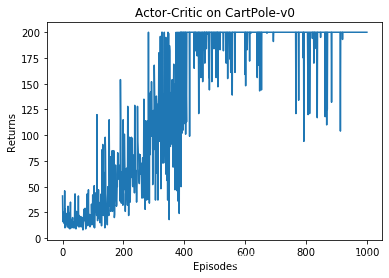
在 CartPole-v0 环境中,满分就是 200 分,让我们来看看每个序列得分如何吧!
episodes_list = list(range(len(return_list)))
plt.plot(episodes_list,return_list)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('Actor-Critic on {}'.format(env_name))
plt.show()
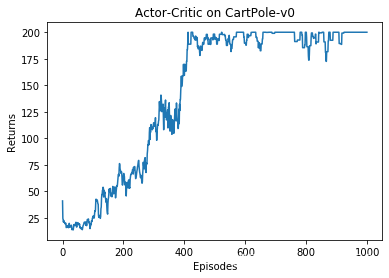
mv_return = rl_utils.moving_average(return_list, 9)
plt.plot(episodes_list, mv_return)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('Actor-Critic on {}'.format(env_name))
plt.show()
根据实验结果我们发现,Actor-Critic 算法很快便能收敛到最优策略,并且训练过程非常稳定,抖动情况相比 REINFORCE 算法有了明显的改进,这多亏了价值函数的引入减小了方差。
4. 总结
我们在本章中学习了 Actor-Critic 算法,它是基于策略和基于价值的方法的叠加。Actor-Critic 算法非常实用,往后像 DDPG、TRPO、PPO、SAC 这样的算法都是在 Actor-Critic 框架下进行发展的,深入了解 Actor-Critic 算法对读懂目前深度强化学习的研究热点大有裨益。
更多Ai资讯:公主号AiCharm
相关资源来自:伯禹学习平台-动手学强化学习
