最近在做水下可见光通信这块,本文是阅读论文“A Survey of Underwater Wireless Optical Communication”之后的简单总结,感兴趣的朋友可以找更多的相关文章进行研读。
0. 摘要
水下无线通信是指在水环境中通过无线载波传输数据,载波可以是电磁波、声波和光波。本文重点介绍了利用光波作为传输载体的水下无线光通信(UWOC)。
0.1 相比于射频和声波,UWOC的优势:
- 更高的传输带宽
- 更高的数据速率
- 更低的链路延时
- 安全性高
- 成本低
0.2 UWOC面对的问题
- 水吸收造成的损耗
- 光的散射
- 湍流和气泡等
0.3 UWOC的应用场景
- 环境监测
- 近海勘探
- 灾害预防
- 军事行动
具体应用如潜水员之间通信,无人驾驶水下车辆,潜艇,船舶和水下传感器等。
0.4 UWOC的研究内容
- 信道特性
- 调制和编码技术
- UWOC的实际实现
1. 引言
1.1 水下无线光通信概述
水下无线通信 (UWC) 技术使海洋勘探系统得以实现,由于UWOC相对于传统的射频和声波具有高带宽高速率的优势,使其成为一种具有吸引力的可行性的替代方案。本文对二十世纪九十年代至今的UWOC研究进行了全面的调查。
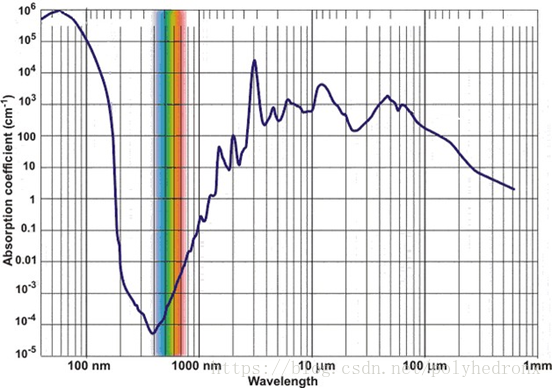
1963年Duntley 提出, 海水在450nm到550nm的波长上显示出相对较低的衰减特性, 对应于蓝色和绿色光谱(如下图),后由Gilbert等人通过实验证实。水中蓝绿光透射 "窗" 的存在为未来 UWOC 的发展提供了基础。UWOC早期主要应用于军事目的,特别是在潜艇通信中。1976年,Karp评估了在水下和地上(卫星)终端之间进行无线光通信的可行性。1977年,加利福尼亚大学的劳伦斯·利弗莫尔实验室的研究人员提出了一种从海岸到潜艇的单向光通信系统。UWOC系统的发射机采用蓝绿光激光源产生光脉冲。由于其紧凑的结构,它可以灵活地被陆地车辆或飞机携带。发射机还可以将其输出光束聚焦在中继卫星上,继而将光束反射到潜艇。其他的UWOC测试,如飞机到潜艇的拓扑结构,也是由美国海军在20世纪90年代初建立的。
几十年来,UWOC仍局限于军事应用。迄今为止,只有少数有限的UWOC产品在20世纪初商业化,例如BlueComm UWOC系统可以在200m距离上实现20Mbps的水下数据传输,以及Ambalux UWOC系统可以在40m的范围内提供10Mbps的数据传输。为了满足人们对于海洋探测的高效高带宽数据传输的需求,研究人员提出了水下无线传感器网络(UWSNs)的概念。UWSNs的提出极大地促进了UWOC的发展。基本的UWSNs由许多分布式节点组成,例如海底传感器、中继浮标、自主水下航行器(AUVs)和远程操作的水下航行器(ROVs)(如图)。
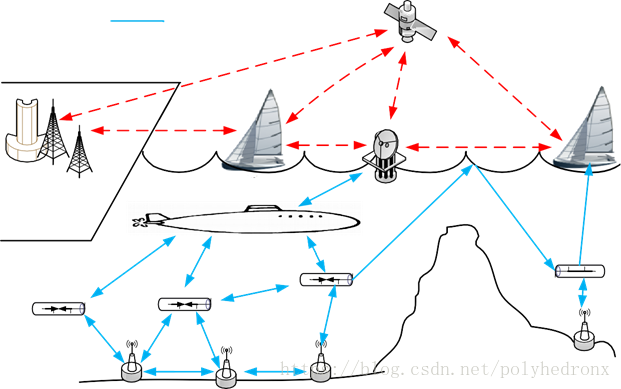
这些节点具有完成感知、处理和通信任务的能力,维持了对水下环境的协作监控。位于海底的传感器收集数据,并通过声学或光学链路传输到AUVs和ROVs。然后,水下机器人和ROVs向船只、潜艇、通信浮标和其他水下航行器传递信号。在海面上方,陆上数据中心通过RF或FSO链路处理数据并与卫星和船舶通信。
基于UWSNs节点之间的链路结构,UWOC可以划分为四类:
- 点对点视线(LOS)结构
- 扩散LOS结构
- 基于逆反射的LOS结构
- 非视线(NLOS)结构

1)点到点LOS结构(图(a))是UWOC最常用的链路结构。在点到点LOS结构中,接收器检测发射器的方向上的光束。由于点对点LOS UWOC系统通常采用窄发散角的光源,如激光器,所以在发射机和接收机之间需要精确的指向。这种要求将限制UWOC系统在浑浊或湍流水环境中的性能,并且当发射机和接收机是非平稳节点,如AUVs和ROVs时,它就成为一个严重的问题。
2)扩散LOS结构采用大发散角的扩散光源,如大功率发光二极管(LED),实现从一个节点到多个节点的UWOC广播(图(b))。广播方法可以放宽对瞄准精度的要求。然而,与点对点LOS结构相比,基于漫射光的连接由于与水的大相互作用面积而遭受水声衰减。相对短的通信距离和较低的数据速率是这种结构的两个主要限制。
3)基于逆向反射器的LOS结构(图(c)),可以被视为点对点LOS结构的一种特殊实现。这种结构适用于具有有限功率和重量预算的双工UWOC系统,例如水下传感器节点。在调制反向反射器链路时,透射光从调制后向反射器反射回来。在这个过程中,反射器对收发器响应的信息将被编码在反射光上。由于后向反射器端没有激光或其他光源,其功耗、体积和重量将大大降低。这种结构的一个限制是发射光信号的后向散射可能干扰反射信号,从而降低了系统信噪比(SNR)并增加了误码率(BER)。此外,由于光信号将通过水下信道两次,接收信号将经历额外的衰减。
4)NLOS结构(图(d))克服了LOS UWOC的对准限制。在这种结构中,发射机以大于临界角的入射角将光束投射到海面,使得光束经历全反射。接收器应保持面向海面的方向与反射光大致平行,以确保适当的信号接收。NLOS链路的主要挑战是由风或其他湍流源引起的随机海面波动。这些不良现象会使光反射回发射机,造成严重的信号色散。
1.2 UWOC的优势和挑战
UWOC系统可以用于多个固定或移动节点之间的高速水下通信,在UWSNs中有很大的应用潜力。UWSNs通常采用声波、射频和光波进行数据传输。
UWOC的优势:
考虑到海洋的极度宽广和海水对其它传输源(如光波和射频波)的强烈衰减作用,水声通信的最吸引人的优点是它可以实现长达几十公里的远距离链路。但它也具有一定的内在技术局限性。首先,由于与水声相关的典型频率在10 Hz和1 MHz之间,所以声链路的传输数据速率相对较低(通常是kbps级别)。其次,由于声波在水中的传播速度很慢(对于纯水来说,在20摄氏度下传播速度约为1500m/s),声学链路遭受严重的通信延迟(通常以秒为单位)。因此,它不能支持需要实时大容量数据交换的应用。第三,声波收发器通常体积大、成本高、耗能大,对于大规模的UWSNs实现不经济。此外,声学技术还会影响到利用声波进行通信和导航的海洋生物。
水下射频电磁(EM)通信可以看作是陆地射频通信的延伸。水下射频通信有两大优势。首先,与声波和光波相比,射频波可以通过空气/水界面进行相对平滑的过渡。这种优点可用于实现将地面射频通信系统和水下RF-EM通信系统结合在一起的跨界通信。第二,RF-EM方法比光学和声学方法更能耐受水的湍流和浊度。短链路范围是阻碍水下RF-EM法发展的致命因素。由于含有大量盐的海水是导电传输介质,所以射频波在超低频(30-300Hz)下只能传播几米。此外,水下RF-EM系统还需要巨大的发射天线和昂贵、耗能的收发器。
与声学方法和RF-EM方法相比,UWOC具有最高的传输数据速率、最低的链路延迟和最低的实现成本。UWOC可以在几十米的中等距离上实现Gbps级别的数据传输速率。这种高速的优势将保证许多实时应用的实现,例如水下视频传输。由于水中光的传输速度远高于声波,因此UWOC链路不受链路延迟的影响。相比于声学方法和射频方法,UWOC还具有更高的通信安全性。大多数UWOC系统是在LOS结构中实现的,而不是像声波和RF那样的扩散广播场景。窃听变得更加困难。此外,UWOC比声学和射频同类产品更节能,更具成本效益。相比于高能耗的大型且昂贵的声学和RF收发器,UWOC系统可以实现相对较小且低成本的光学水下收发器,例如激光二极管和光电二极管。这种效益可以提高UWOC的大规模商业化,并加速UWSNs的实现。
UWOC面临的主要挑战如下:
1)光信号受到严重的吸收和散射。虽然透射光的波长使用蓝光和绿光能最大限度地减少透射衰减效应,但是在水中,光子不可避免地与水分子和水中其他颗粒物质相互作用,吸收和散射仍然严重削弱了透射光信号并导致多径衰落。由于吸收和散射的影响,UWOC在浑浊的水环境中在几百米的链路距离上误码率性能较差。在水下环境中,叶绿素等物质能够吸收蓝光和红光。这些物质和其他有色溶解有机物质(CDOM)会增加水的浊度,从而缩小光的传播距离。此外,CDOM的浓度也会随着海洋深度的变化而变化,从而改变相应的光衰减系数。 这些不良影响将增加UWOC系统的复杂性。
2)由于光收发器的错