参考链接:Ubuntu 22.04 LTS安装ROS2 (ros-humble-desktop)-CSDN博客
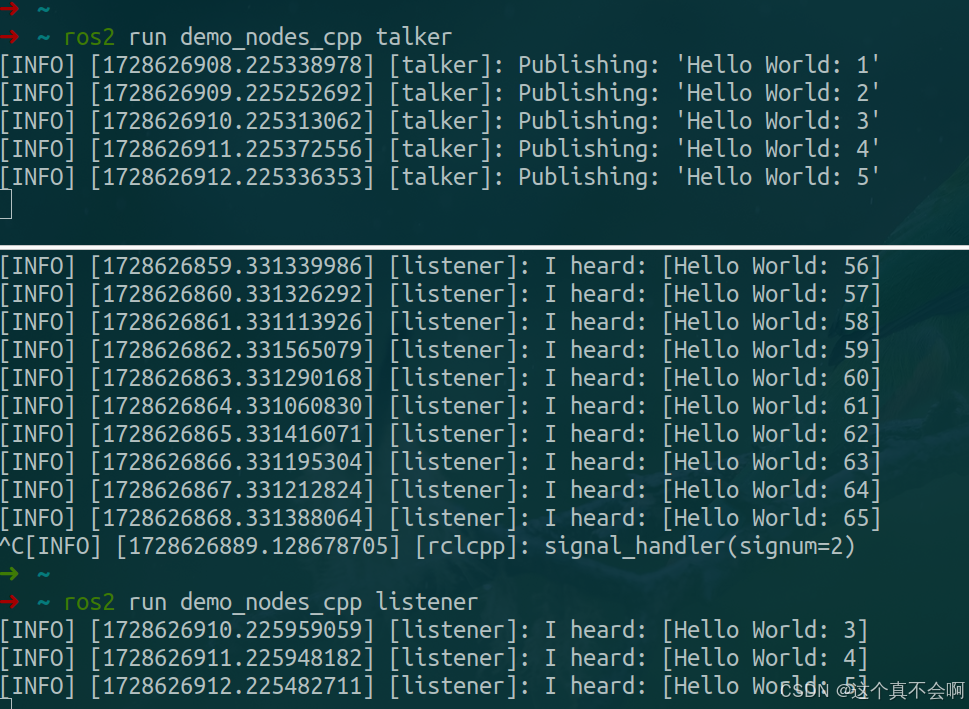
1、安装测试
ros2 run demo_nodes_cpp listener
再开一个终端
ros2 run demo_nodes_cpp listener
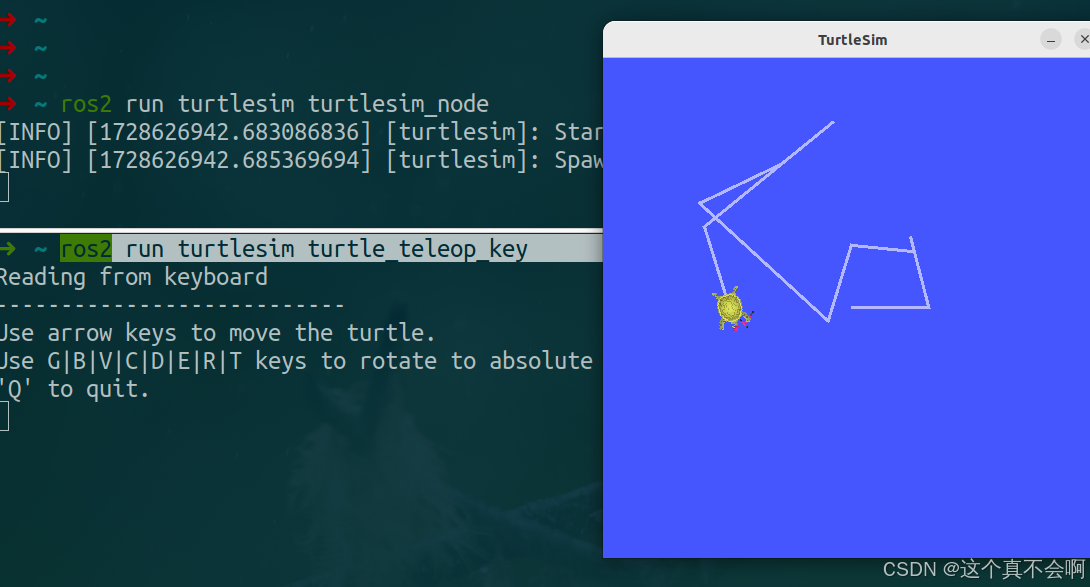
2、小海龟模拟器
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
两个终端分别执行,通过上下左右就可以控制海龟运动
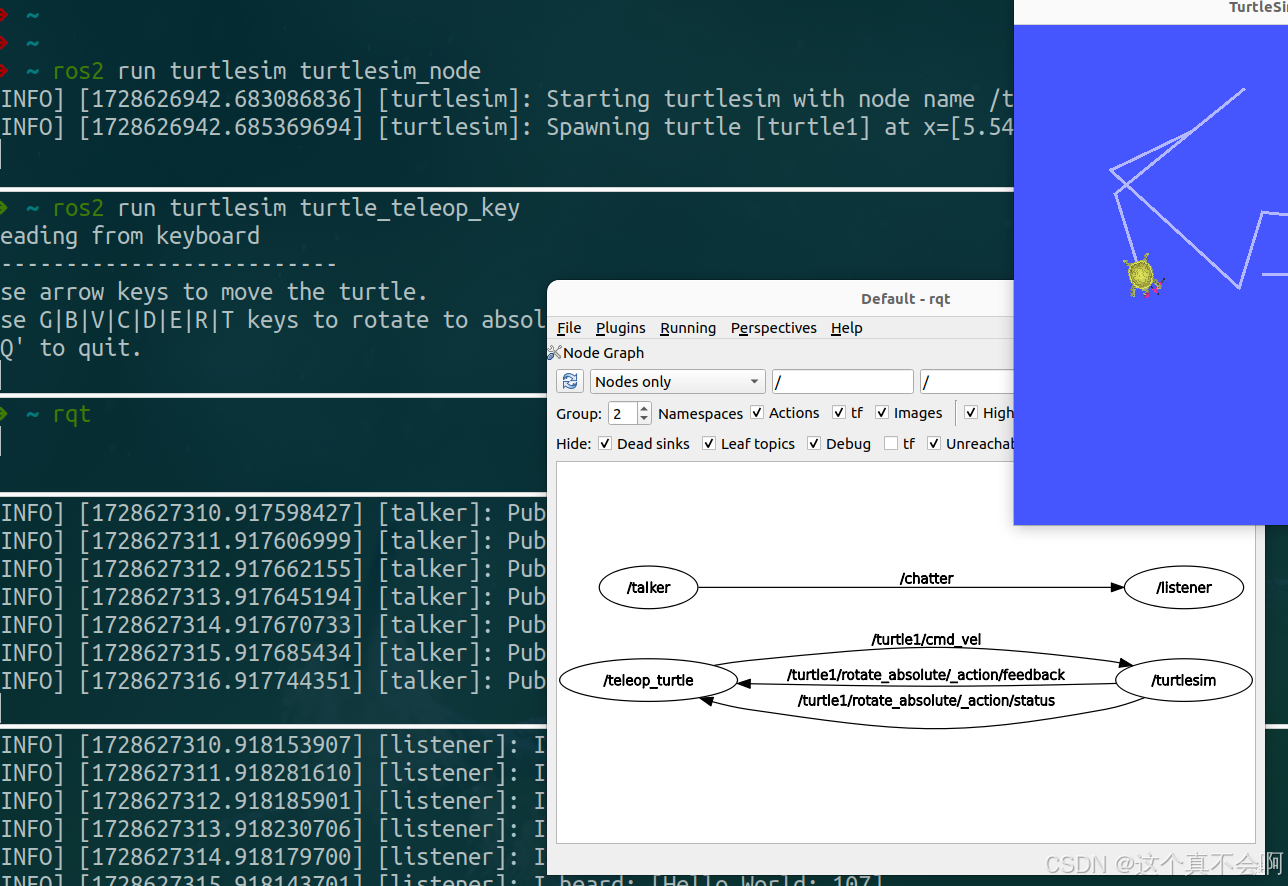
终端执行rqt
plugins -> introspection -> node graph 可以看到节点之间关系以及topic name
3、踩坑
1、秘钥拉取失败
执行