文章目录
准备工作
- 下载并安装V-REP机器人仿真软件
- 熟悉软件界面与基本操作:用户手册
任务1:智能小车平台建模
- 参考文档中 Tutorial - BubbleRob tutorial 部分,学习:
- 车身与轮子物理模型的设计
- 动力学模型等参数的设置
- 传感器的添加与使用
- 驱动关节的设计与控制
- 控制脚本的编写
- …
- 实现要求:
- 搭建一个四轮小车,小车搭建一个单目彩色摄像头
- 尺寸(如长宽高)及底盘参数(如速度限制)可参考 DJI RoboMaster S1 进行设计
- 不采用麦克纳姆轮
- 编写简单脚本使得小车能呈S型路线行走,当碰到障碍物后能够绕行
- 提交内容:
- report/实验报告.pdf
- src/项目文件
实现
搭建四轮小车
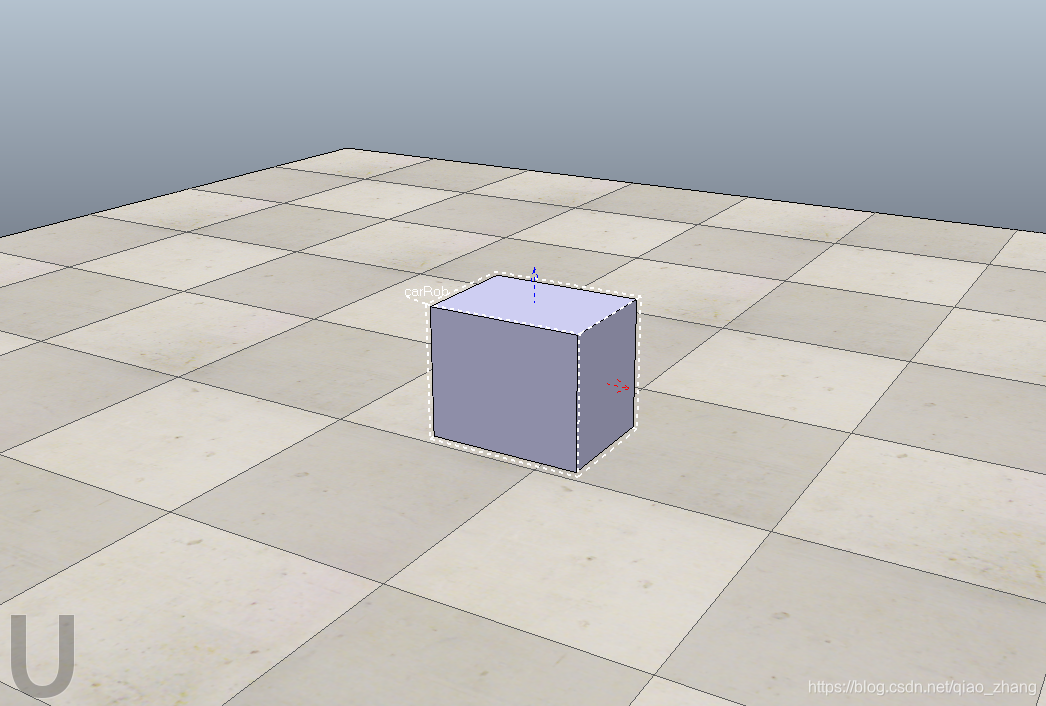
1. 添加小车 carRob
在场景中添加一个 320 × 240 × 270 mm(长 × 宽 × 高)的长方体并命名为 carRob。在 Object Properties 中设置使能立方体的 Collidable、Measurable、Renderable 和 Detectable 属性,便于之后传感器计算物体之间的距离。将小车的位置沿 z 轴向上移动 2 cm。
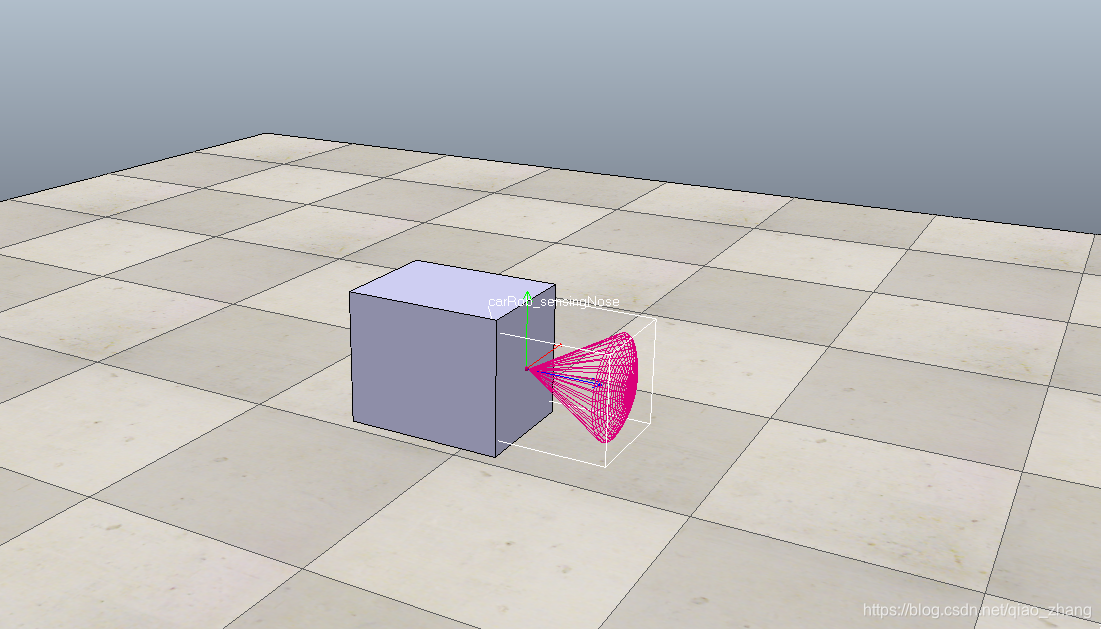
2. 添加接近传感器 proximity sensor
在场景中添加一个锥形接近传感器,修改接近传感器的位置和方向,在 Object Properties 中修改传感器的参数。将其命名为 carRob_sensingNose,并添加到 carRob 目录下。
3. 添加车轮 wheel
在场景中添加一个半径为 0.1 m,高为 0.02 m 的圆柱体,像 carRob 一样调整圆柱体的 Collidable、Measurable、Renderable 和 Detectable 属性。修改车轮的位置和方向,绝对位置为(0.09,0.13,0.05),绝对欧拉角为(-90,0,0),将其命名为 carRob_front_leftWheel。复制粘贴前左轮,创建其余三个车轮,并修改相应的位置和名称。