图像分割是计算机视觉中的一项关键技术,用来将图像划分为若干个 有意义 的区域,以便后续的图像处理和分析工作。根据任务的不同,图像分割可以进一步细分为语义分割、实例分割和全景分割:
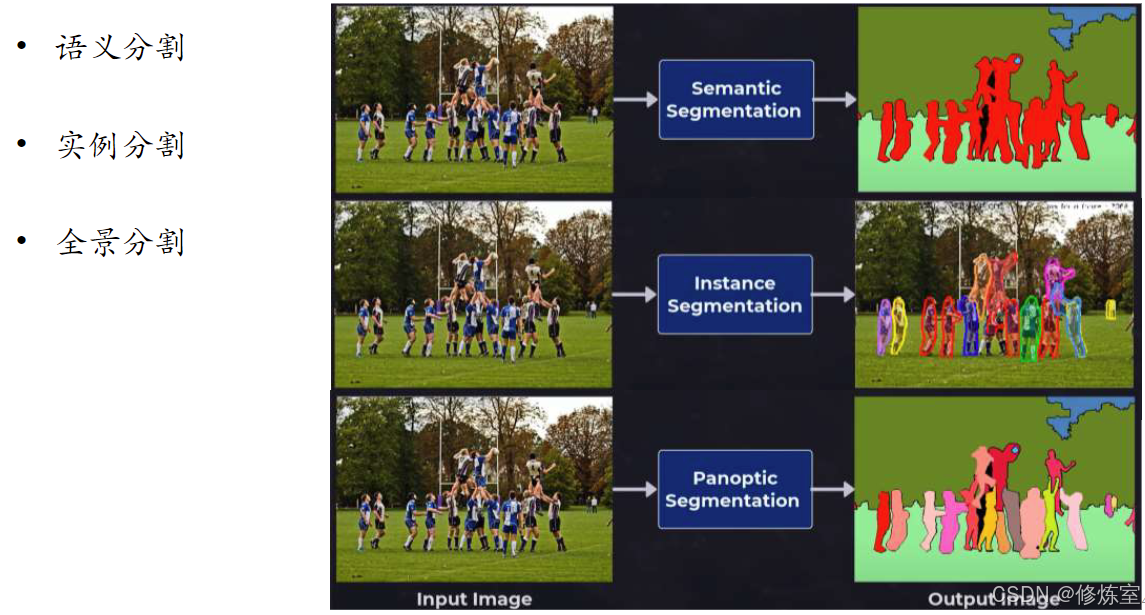
- 语义分割 (Semantic Segmentation) 对图像中的每个像素进行分类,但不会区分同一类别中的不同个体。所有属于同一类别的像素都会被标记为同一个类别区域,比如一张图片中的所有人都会被归类为“人”。
- 实例分割 (Instance Segmentation) 不仅识别每个像素的类别,还能够区分同一类别中的不同实例。例如,在一张足球场景的图片中,每个人都会被单独标记出来,而不仅仅是整体被归为“人”类。
- 全景分割 (Panoptic Segmentation) 结合了语义分割和实例分割的特点,不仅识别类别,还能区分不同个体,确保每个像素都被分配到一个明确的类别或背景。
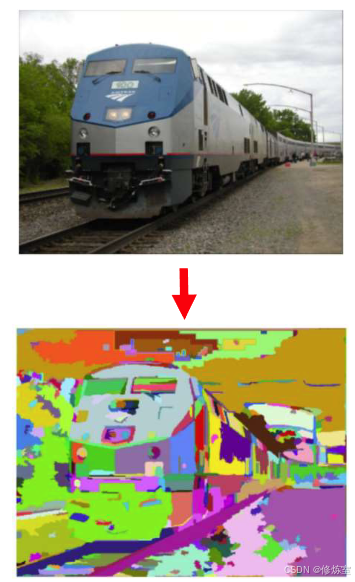
我们在图像分割中的主要目标是,将图像划分成有意义的 “物体”(如上图所示),并且将看起来相似的像素组合在一起以提高后续处理的效率。这种方式不仅能够提取出图像中的特定对象,还可以减少噪音和冗余数据,帮助后续的任务更精确地进行。
在这样的背景下,图像分割方法可以大体分为基于聚类和基于学习的两大类。两种常用的基于聚类的图像分割方法是 K-means 和 Mean-Shift。尽管K-means主要是一种用于聚类分析的算法,但通过适当的修改,它也能够很好地应用于图像分割中。本文将详细探讨这两种方法在图像分割中的应用以及其背后的数学原理。
0. 阈值化
在图像分割中,一种常用且基础的技术是 阈值化 (Thresholding),它通过简单的像素值比较方法,将图像中的前景和背景分离开来,以此来达到分割目标的目的。
阈值化技术的工作原理
在阈值化过程中,假设图像由白色背景和深色物体组成。

图像的像素灰度值分布可以通过 灰度直方图 来分析。
灰度直方图是一种用于分析图像中像素灰度值分布的工具,它能够直观地展示图像中每个灰度值的像素数量。在图像处理中,灰度值通常取值范围是 0 到 255,表示从黑到白的变化程度:
- 灰度值为 0 表示最深的黑色像素。
- 灰度值为 255 表示最亮的白色像素。
- 中间的灰度值(1 到 254) 则表示介于黑白之间的不同深浅程度的灰色。
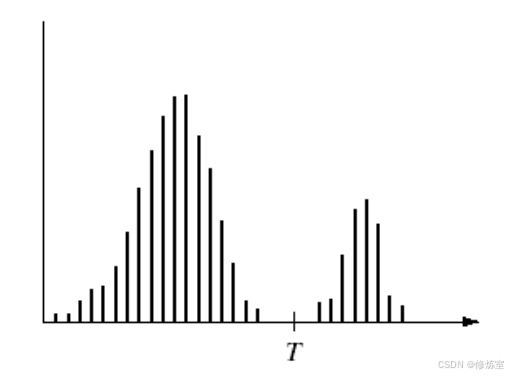
在灰度直方图中,横轴表示灰度值从 0 到 255 的变化,纵轴表示图像中具有某一特定灰度值的像素的数量。直方图左边的部分代表深色像素(如阴影或暗物体),而右边的部分则代表亮色像素(如背景或高亮区域)。
阈值化的数学表达如下:
g ( x , y ) = { 1 , if f ( x , y ) > T 0 , if f ( x , y ) ≤ T g(x, y) = \begin{cases} 1, & \text{if } f(x, y) > T \\ 0, & \text{if } f(x, y) \leq T \end{cases} g(x,y)={1,0,if f(x,y)>Tif f(x,y)≤T
其中, f ( x , y ) f(x, y) f(x,y) 是原图像中像素的灰度值, g ( x , y ) g(x, y) g(x,y) 是二值化后的图像像素值。灰度值大于阈值 T T T 的像素被标记为1(表示背景),小于或等于 T T T 的像素被标记为0(表示前景)。
阈值化的优势
- 简洁高效:阈值化通过简单的灰度值比较,可以快速完成图像分割,适合处理大量图像。
- 计算代价低:与复杂的分割算法相比,阈值化的计算复杂度较低,适合处理前景和背景差异明显的简单图像。
阈值化的局限性
尽管阈值化简单高效,但它在处理复杂图像时存在一些局限性。例如:
- 前景和背景之间的灰度差异较小,阈值化可能难以有效分割。
- 图像中存在噪声时,单一阈值分割可能会误分出一些不相关的区域。
因此,在处理复杂的图像场景时,通常需要结合更高级的分割技术(如自适应阈值化、Otsu 算法等),或使用基于聚类的分割方法,如 K-means 和 Mean-Shift。
聚类方法在图像分割中的应用
在更复杂的场景中,基于聚类的图像分割方法常常被用来替代简单的阈值化。例如,K-means 和 Mean-Shift 都是经典的聚类算法,它们通过将图像像素点划分为若干个类簇,能够很好地应用于图像分割中。
- K-means 是一种迭代聚类算法,它通过最小化类内差异来找到最优的分割结果。
- Mean-Shift 则是一种基于密度估计的算法,通过不断移动数据点到局部数据密度的高点,最终实现分割。
1. K-means算法在图像分割中的应用
K-means 是一种经典的无监督聚类算法,其目标是将数据点划分为 K K K 个簇,使得同一簇内的数据点距离簇的质心(centroid)尽可能近。虽然 K-means 通常用于数据聚类,但它可以被巧妙地应用于图像分割。
1.1 K-means算法的基本流程
K-means 算法的基本流程如下:
- 初始化 K K K 个质心。
- 对于每个数据点,计算它与所有质心的距离,将其分配给距离最近的质心所属的簇。
- 重新计算每个簇的质心,即簇中所有点的均值。
- 重复步骤 2 和 3,直到质心的位置不再发生变化,或变化小于某个阈值。
在数学上,K-means 的目标是最小化下面的代价函数:
J = ∑ i = 1 K ∑ x ∈ C i ∣ ∣ x − μ i ∣ ∣ 2 J = \sum_{i=1}^{K} \sum_{x \in C_i} ||x - \mu_i||^2 J=i=1∑Kx∈Ci∑∣∣x−μi∣∣2
其中, x x x 表示数据点, C i C_i Ci 表示第 i i i 个簇, μ i \mu_i μi 表示第 i i i 个簇的质心。
1.2 K-means在图像分割中的应用
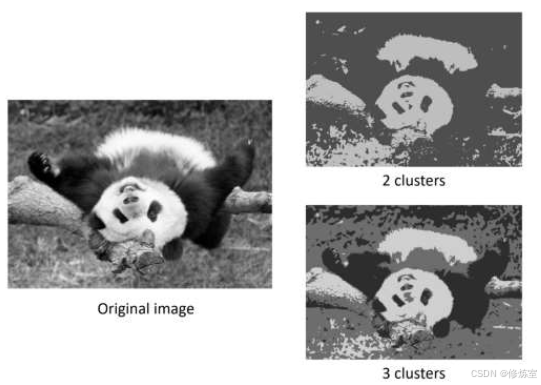
K-means 聚类算法可以被应用于图像分割,具体是将图像的像素点聚类为 K K K 个不同的组,每个组对应图像中的一个分割区域。这种分割方法的核心思想是 将图像像素看作数据点,并依据像素的特征对其进行聚类 。通常情况下,K-means 会基于像素的颜色特征(RGB或其他颜色空间的值)和空间位置进行聚类。
1.3 颜色和空间信息的结合
在 K-means 聚类算法中,基于颜色信息进行图像分割是最常见的一种方法。例如,通过像素的 RGB 值可以将颜色相近的像素归为一类。然而,单纯基于颜色信息进行聚类,尽管能够区分不同颜色的区域,但在处理具有相似颜色的对象时可能会带来一些问题。比如,在图片中,熊猫的黑色斑纹和其他黑色区域可能会被错误地分为同一个簇,而忽略了它们在空间上的位置差异。
加入空间信息的特征向量
为了解决这个问题,可以将空间信息加入到像素的特征中。假设一个像素点的颜色值为 ( R , G , B ) (R, G, B) (R,G,B),位置坐标为 ( x , y ) (x, y) (x,y),那么可以将它们组合起来作为像素点的特征向量 ( R , G , B , x , y ) (R, G, B, x, y) (R,G,B,x,y)。这样,K-means 计算簇质心时,不仅考虑了颜色信息,还考虑了像素点在图像中的位置,从而得到更合理的分割。
在这种情况下,K-means 的代价函数可以表示为:
J = ∑ i = 1 K ∑ ( c , p ) ∈ C i ∣ ∣ c − μ i c ∣ ∣ 2 + λ ∣ ∣ p − μ i p ∣ ∣ 2 J = \sum_{i=1}^{K} \sum_{(c, p) \in C_i} ||c - \mu_i^c||^2 + \lambda ||p - \mu_i^p||^2 J=i=1∑K(c,p)∈Ci∑∣∣c−μic∣∣2+λ∣∣p−μip∣∣2
其中, c c c 表示颜色特征, p p p 表示像素位置, μ i c \mu_i^c μic 和 μ i p \mu_i^p μip 分别表示第 i i i 个簇的颜色质心和位置质心, λ \lambda λ 是平衡颜色和位置信息的权重。
为了解决上述问题,可以将像素点的颜色信息和空间位置组合成一个特征向量。在这种情况下,每个像素的特征向量可以表示为 ( R , G , B , x , y ) (R, G, B, x, y) (R,G,B,x,y),其中:
- ( R , G , B ) (R, G, B) (R,G,B) 是像素的颜色值;
- ( x , y ) (x, y) (x,y) 是像素在图像中的坐标位置。
这样,K-means 在计算簇质心时,不仅考虑了颜色信息,还考虑了像素的空间位置,从而能更好地保留图像结构和局部连续性。通过这种方法,相同颜色但位于图像不同区域的像素可以被分为不同的簇,而颜色相似且位于图像中相近位置的像素则会被归为同一类。
感谢您提供的图片资料,下面我将对您的Mean-Shift算法描述进行细化和扩展,使其更专业,并在细节和逻辑上更加完善。
2. Mean-Shift算法在图像分割中的应用
Mean-Shift是一种基于密度估计的 无参数聚类 方法,广泛应用于图像分割和模式识别中。不同于传统的K-means算法,Mean-Shift不需要预设簇的数量 K K K ,而是通过 利用密度梯度移动到数据密度最高点 来识别簇。最终,Mean-Shift能够自适应地确定图像中的高密度区域(模式)作为聚类中心,使其特别适用于复杂、非规则形状簇的检测。
2.1 Mean-Shift算法的基本原理
Mean-Shift的核心思想是 通过窗口内均值的迭代移动,最终收敛到密度峰值。具体来说,该算法会为每个数据点定义一个“窗口”或“核函数”,通过移动窗口逐步向密度高的区域靠近,直到该窗口位于局部密度峰值处。此过程的每一步中,Mean-Shift会计算当前窗口中数据点的加权均值,并将窗口移动至该均值所在位置。该过程会持续迭代,直到窗口的移动量小于某一设定阈值,达到收敛状态。
公式上,Mean-Shift算法对于每个数据点 x i x_i xi 的位置 m ( x i ) m(x_i) m(xi) 的更新步骤如下:
m ( x i ) = ∑ x j ∈ N ( x i ) K ( x j − x i ) x j ∑ x j ∈ N ( x i ) K ( x j − x i ) m(x_i) = \frac{\sum_{x_j \in N(x_i)} K(x_j - x_i) x_j}{\sum_{x_j \in N(x_i)} K(x_j - x_i)} m(xi)=∑xj∈N(xi)K(xj−xi)∑xj∈N(xi)K(xj−xi)xj
其中:
- K K K 为核函数(如常用的高斯核),用于计算相邻点 x j x_j xj 对 x i x_i xi 的“拉力”,即相邻点对中心点的影响。
- N ( x i ) N(x_i) N(xi) 表示点 x i x_i xi 的邻域,通常由核带宽(窗口的半径)决定。
该公式表明,每个数据点会受到其邻域中点的拉力影响,这种拉力会随着距离增大而减弱,因此距离更近的点对其影响更大。通过迭代更新,Mean-Shift算法最终将每个点移动至局部密度峰值,即密度最高的区域。
2.2 Mean-Shift在图像分割中的应用
在图像分割中,Mean-Shift将每个像素点视为数据点,利用其特征(如颜色和空间位置)在特征空间中进行聚类。典型的像素特征包括颜色信息(RGB值)和位置(图像中的坐标)。通过结合颜色和空间位置,Mean-Shift能够识别图像中具有相似颜色或邻近位置的区域,从而在图像中形成不同的簇。
由于Mean-Shift在特征空间中运行,因此它可以处理基于颜色或基于空间的分割。例如,在颜色分割时,颜色相似但空间位置不同的像素可能会被聚为一类。为了解决这一问题,Mean-Shift常结合空间位置信息(如坐标)进行聚类,确保得到符合空间结构的分割结果。
2.3 Mean-Shift算法的执行过程
在图像分割任务中,Mean-Shift算法的执行过程包含以下几个主要步骤,每一步都可以从图示中清晰看到算法的原理和执行细节。
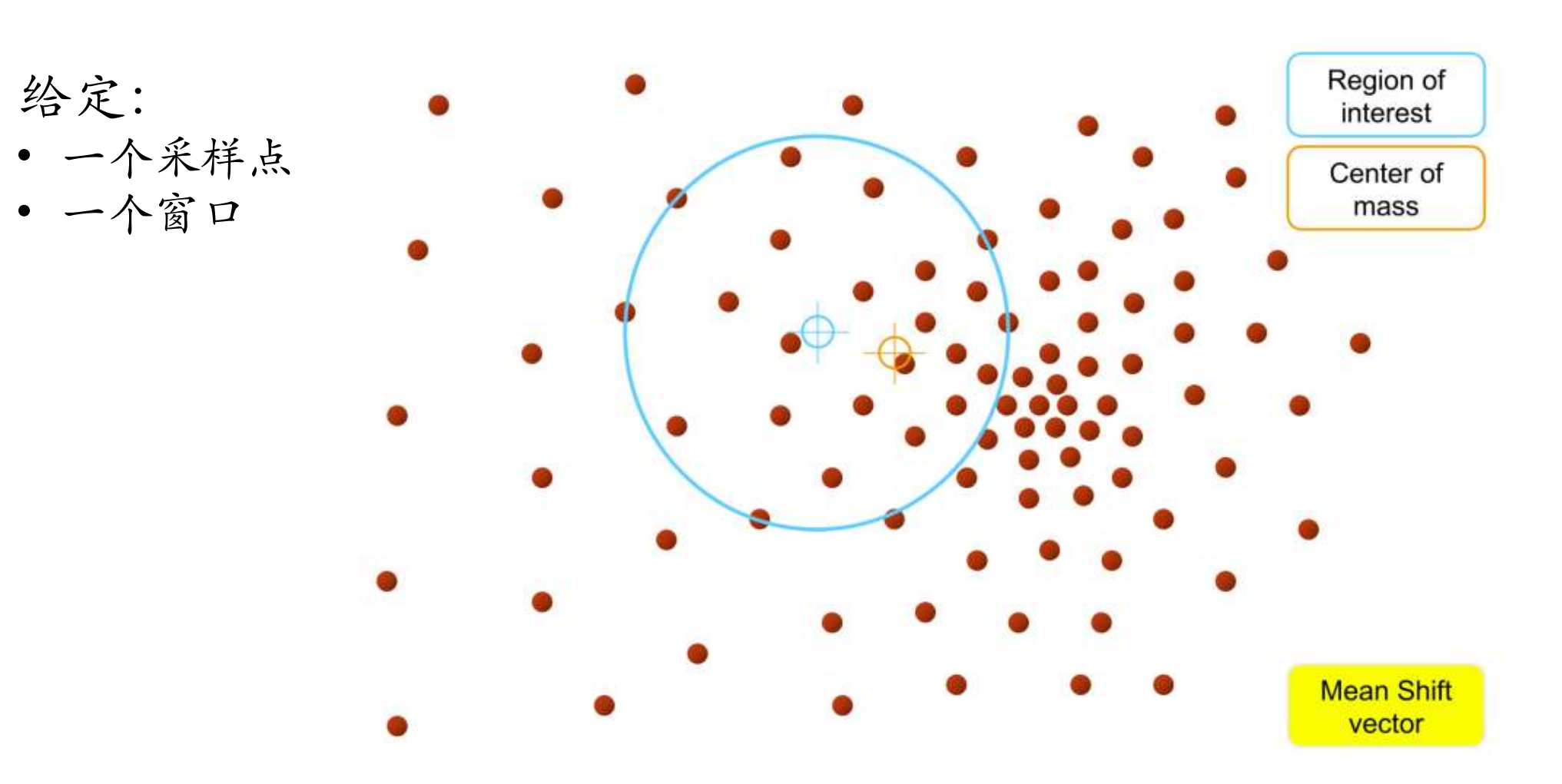
1.初始化窗口
对于图像中的每个像素点,Mean-Shift算法会初始化一个窗口。窗口的大小由核带宽决定,决定了该窗口所能包含的邻域范围。这个窗口通常设定在 像素点的初始位置 上,作为初始的估计位置。第一张图显示了初始窗口的设置,蓝色圆圈表示兴趣区域,中心标识为采样点,代表计算起点。
-
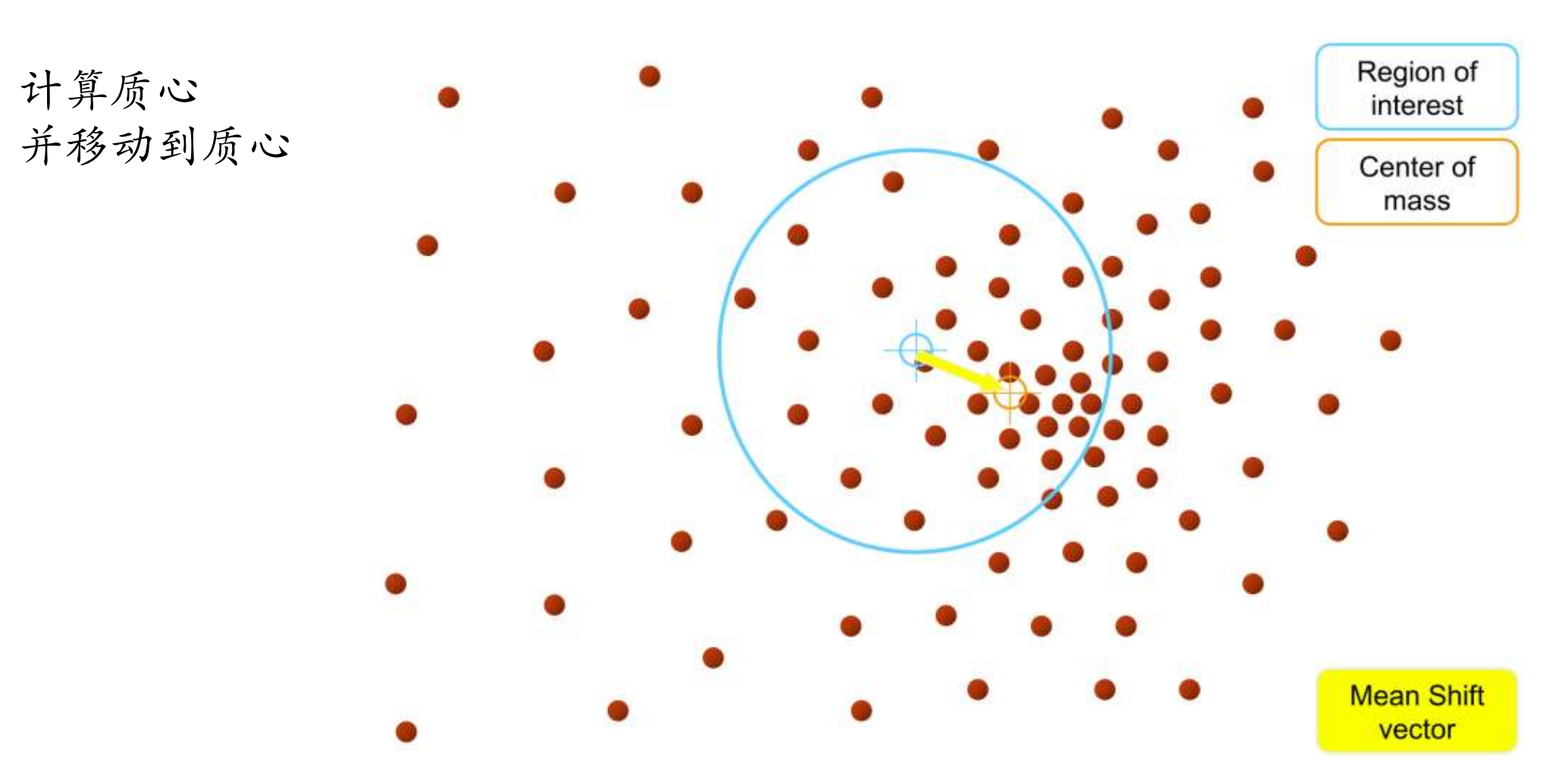
计算质心并移动
在每一步迭代中,算法会计算当前窗口内所有像素点的加权均值(质心),即利用邻域中的其他像素对中心位置的拉力进行平均。计算出的质心位置会作为新的中心点,然后将窗口移动至该位置。此时黄色箭头代表Mean-Shift向量,显示出窗口的移动方向和距离。随着每次迭代,窗口将逐渐向密度更高的区域移动。
-
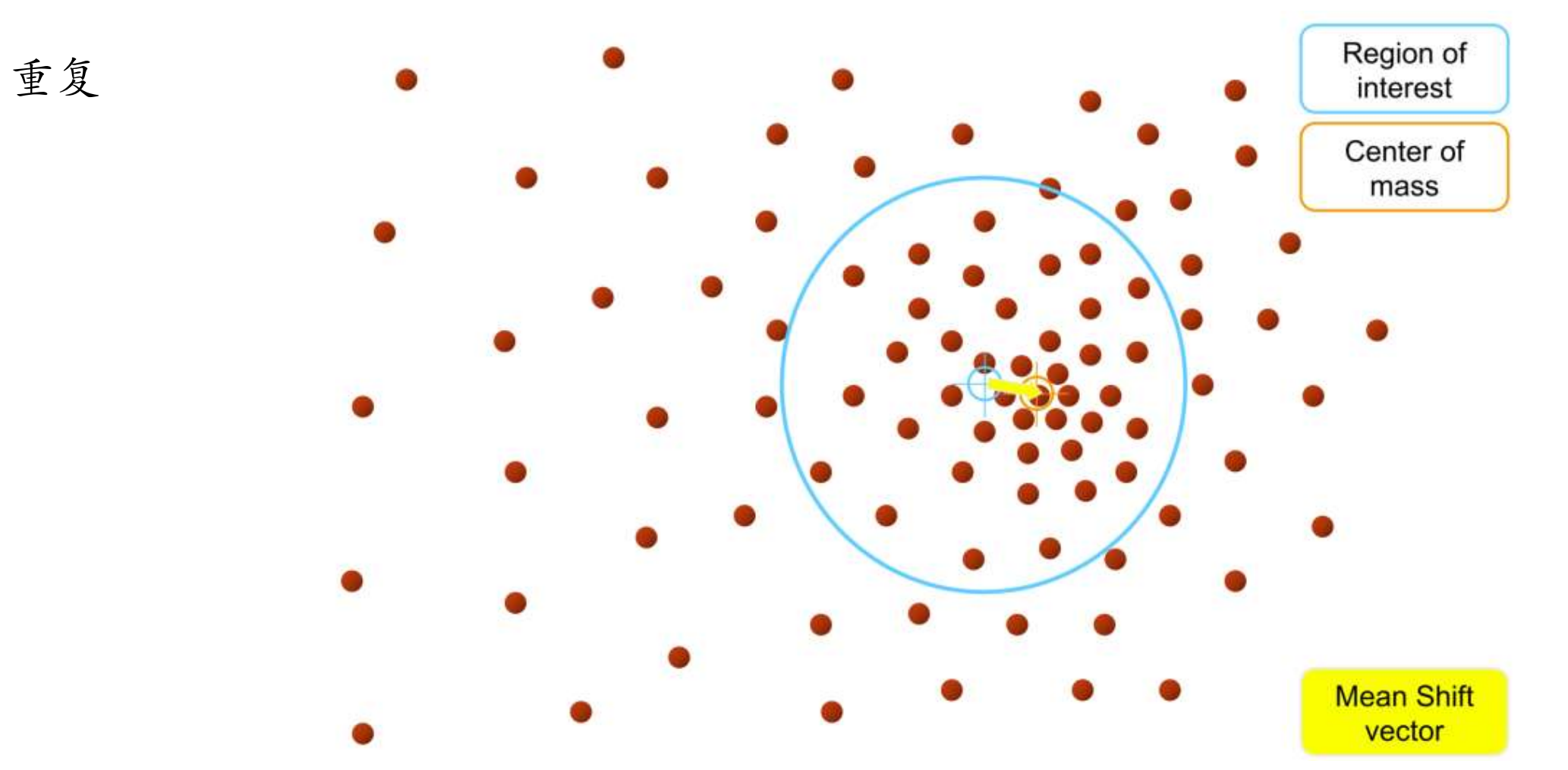
重复迭代直至收敛
迭代步骤会不断重复,直到窗口的移动量小于设定的阈值,即达到局部密度峰值为止。第三张图展示了该过程中,窗口逐渐收敛到密度中心点的位置。当所有像素点停止移动或移动量不足以继续调整时,即可认为算法达到了收敛状态。
-
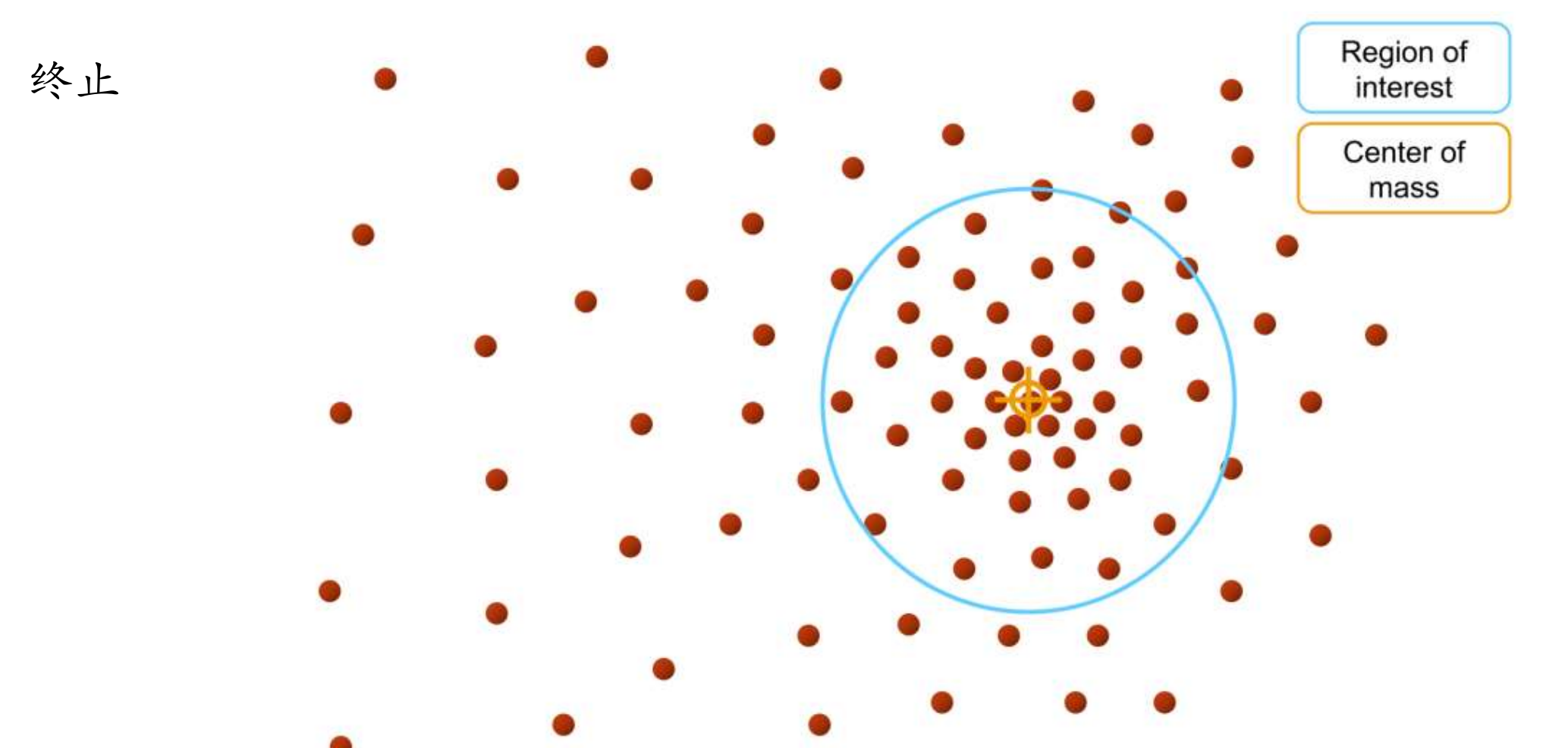
模式检测和分割完成
当所有窗口都完成收敛后,位置相近的点会聚集成簇。这些簇表示图像中不同的区域或对象,每个簇的中心即为局部密度的峰值。这些最终形成的簇将构成图像的分割结果。第四张图中,蓝色窗口最终覆盖了密集区域的中心,标识了最终的分割模式位置,表明Mean-Shift算法成功识别出图像中的模式结构。
2.4 Mean-Shift的优势与挑战
优势:
- Mean-Shift无需预设簇的数量 K K K,自适应地识别数据中的密度峰值,使其在处理复杂或不规则的图像区域时表现尤为出色。
- 通过利用局部密度信息,Mean-Shift对包含噪声或复杂纹理的图像具有良好的鲁棒性,适合多种分割任务。
- 在高维特征空间(如颜色+位置)下的应用使其能够在图像分割中同时考虑颜色和空间信息,提高分割质量。
挑战:
- Mean-Shift的计算复杂度较高,尤其在处理大规模图像时,由于每个像素点都需与其邻域进行密度估计,计算成本较高。
- 分割结果依赖于核带宽大小的选择,带宽过大或过小都会影响分割效果。因此,带宽的合理设定对分割精度至关重要。
- 在高维特征空间应用时,Mean-Shift对维度增加较为敏感,适应性和效率可能受到影响。
总结
Mean-Shift作为一种无参数的图像分割方法,通过基于密度的迭代移动,能够自适应地识别图像中的密度峰值区域,实现有效的分割。其无需预设簇数量、对复杂图像具备鲁棒性等优点,使其在多种图像分割任务中表现良好。然而,计算复杂度和带宽选择的限制对其应用提出了较高要求。在实践中,可以通过优化算法实现和合理的带宽设定,来平衡分割精度与计算代价,发挥Mean-Shift在复杂场景中的潜力。
3. K-means与Mean-Shift的对比
| 方法 | 优点 | 缺点 |
|---|---|---|
| K-means | 1. 计算简单,速度较快 2. 易于理解和实现 | 1. 需要预设簇的数量
K
K
K 2. 对初始质心敏感,容易陷入局部最优解 |
| Mean-Shift | 1. 不需要预设簇数量 2. 能处理复杂形状的簇 | 1. 计算复杂度较高 2. 对带宽参数敏感 |
4. 结论
K-means 和 Mean-Shift 都是应用广泛的图像分割算法,各自具有独特的优势和适用场景。K-means 通过结合颜色和空间信息,实现了高效、快速的图像分割,适合簇数已知且分布均匀的图像。但由于其需要预设簇数量 K K K,在复杂、不规则场景中可能存在局限性。
相比之下,Mean-Shift 算法不需要预设簇数,而是通过检测 局部密度峰值 进行分割,适合处理复杂形状和密度分布不均的区域。然而,Mean-Shift 的计算复杂度较高,对大规模图像的处理时间较长,对带宽参数的选择也较为敏感。
深入理解 K-means 和 Mean-Shift 的数学原理和操作过程,有助于在不同的图像分割任务中更好地选择和应用最适合的算法。选择合适的方法,能够提高图像分割的效率和准确性,满足各类计算机视觉应用的需求。