grounding_dino
论文
Grounding DINO: Marrying DINO with Grounded Pre-Training for Open-Set Object Detection
论文链接
模型结构
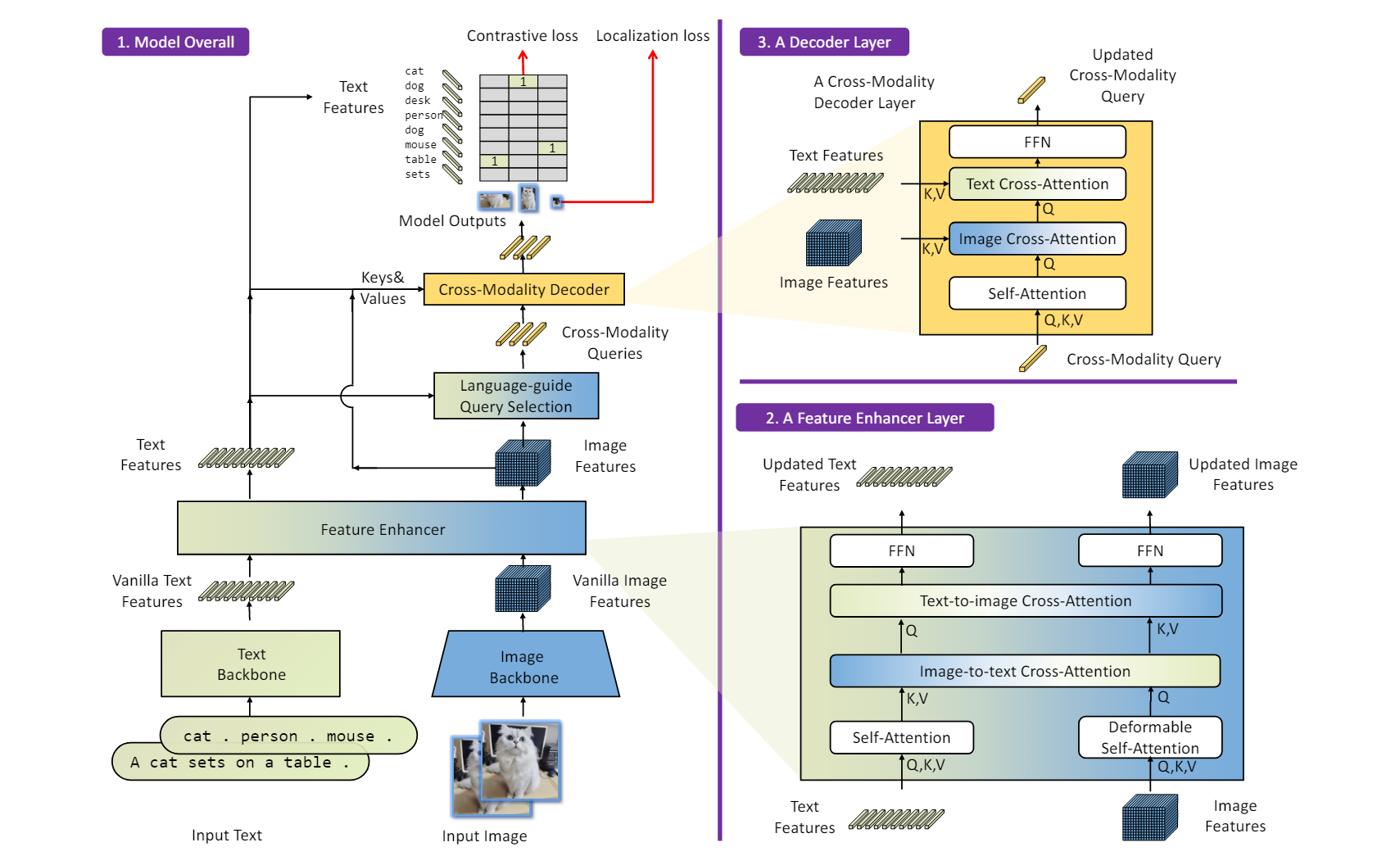
论文提出了一种名为Grounding DINO的开放集目标检测器。它将基于Transformer的DINO检测器与预训练相结合,能够通过人类输入如类别名称或指代表达式来检测任意对象.
- feature enhancer:text feature使用 self-attention, image features使用deformabel self-attention来减少计算量。
- query初始化:feature enhancer输出的text features与image features,计算相似度,并求最大值后排序。
- Cross-Modality Decoder:用第2步提取query做为输入,依次与image features,text features进行跨模态注意力计算,最终,获得更新后的decode输出。
算法原理
闭集检测器通常具有三个重要模块:特征提取的主干、用于特征增强的颈部和用于区域细化(或框预测)的头部
闭集检测器可以通过学习语言感知的区域嵌入来泛化以检测新对象,从而使每个区域可以在语言感知的语义空间中被分类为新类别。实现这一目标的关键是在颈部和/或头部输出处使用区域输出和语言特征之间的对比损失。

环境配置
Docker(方法一)
docker pull image.sourcefind.cn:5000/dcu/admin/base/pytorch:2.1.0-centos7.6-dtk24.04-py310
docker run -it -v /path/your_code_data/:/path/your_code_data/ -v /opt/hyhal/:/opt/hyhal/:ro --shm-size=80G --privileged=true --device=/dev/kfd --device=/dev/dri/ --group-add video --name docker_name imageID bash
cd /your_code_path/grounding_dino_mmcv
pip install mmdet -i https://mirrors.aliyun.com/pypi/simple/
pip install -r requirements/multimodal.txt -i https://mirrors.aliyun.com/pypi/simple/
export HF_ENDPOINT=https://hf-mirror.com
Dockerfile(方法二)
cd ./docker
docker build --no-cache -t mmdet:last .
docker run -it -v /path/your_code_data/:/path/your_code_data/ -v /opt/hyhal/:/opt/hyhal/:ro --shm-size=80G --privileged=true --device=/dev/kfd --device=/dev/dri/ --group-add video --name docker_name imageID bash
cd /your_code_path/grounding_dino_mmcv
pip install mmdet -i https://mirrors.aliyun.com/pypi/simple/
pip install -r requirements/multimodal.txt -i https://mirrors.aliyun.com/pypi/simple/
export HF_ENDPOINT=https://hf-mirror.com
Anaconda(方法三)
1、关于本项目DCU显卡所需的特殊深度学习库可从光合开发者社区下载安装: https://developer.hpccube.com/tool/
DTK软件栈: dtk24.04
python: python3.10
torch: 2.1
mmcv: 2.0.1
Tips:以上dtk软件栈、python、torch、mmcv等DCU相关工具版本需要严格一一对应
2、其他非特殊库直接按照requirements.txt安装
cd /your_code_path/grounding_dino_mmcv
pip install mmdet -i https://mirrors.aliyun.com/pypi/simple/
pip install -r requirements/multimodal.txt -i https://mirrors.aliyun.com/pypi/simple/
export HF_ENDPOINT=https://hf-mirror.com
数据集
COCO2017(在网络良好的情况下,如果没有下载数据集,程序会默认在线下载数据集)
训练数据快速下载中心:SCNet AIDatasets ,项目中的训练数据下载地址COCO2017
数据集的目录结构如下:
├── images
│ ├── train2017
│ ├── val2017
│ ├── test2017
├── labels
│ ├── train2017
│ ├── val2017
├── annotations
│ ├── instances_val2017.json
├── LICENSE
├── README.txt
├── test-dev2017.txt
├── train2017.txt
├── val2017.txt
我们通过了mini数据集,供验证训练使用,如需正式使用,请下载完整COCO数据集或使用定制化数据集。
cd /your_code_path/grounding_dino_mmcv
cd datasets/
unzip coco_mini.zip
训练
- 数据集放置位置默认为当前目录下 datasets/
- 如需要变更数据集目录 请修改 coco_detection.py下的 data_root
单机四卡
cd /your_code_path/grounding_dino_mmcv
bash ./train_multi.sh
单机单卡
cd /your_code_path/grounding_dino_mmcv
bash ./train.sh
推理
- 可使用官方模型权重进行推理,也可使用自己训练模型权重进行推理
- 这里以官方模型推理举例[下载地址:groundingdino_swint_ogc_mmdet-822d7e9d.pth]
- 官方推理需要下载nltk的nltk_data中的 tokenizers/punkt和taggers/averaged_perceptron_tagger
- 可在http://www.nltk.org/nltk_data/ 下载并放于/root/nltk_data下
- nltk数据如下所示
├── nltk_data
│ ├── taggers
│ ├── averaged_perceptron_tagger
│ ├──averaged_perceptron_tagger.pickle
│ ├── tokenizers
│ ├──punkt
│ ├──czech.pickle
│ ├──anish.pickle
│ ├──dutch.pickle
│ ├── ......
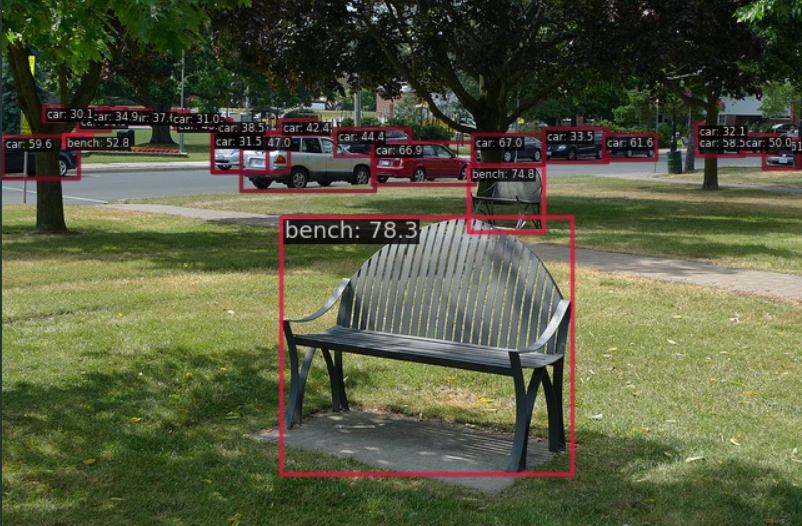
# 官方推理代码
python demo/image_demo.py \
demo/demo.jpg \
configs/grounding_dino/grounding_dino_swin-t_pretrain_obj365_goldg_cap4m.py \
--weights groundingdino_swint_ogc_mmdet-822d7e9d.pth \
--texts 'bench . car .'
result
精度
| 模型名称 | Backbone | Style | amp混精 | Box [email protected] |
|---|---|---|---|---|
| Mask R-CNN | R50 | Scratch | on | 48.3 |
应用场景
算法类别
目标检测
热点应用行业
金融,交通,教育