stm32 串口读取数据中断
- USART_IT_RXNE:读取到一个数据产生中断
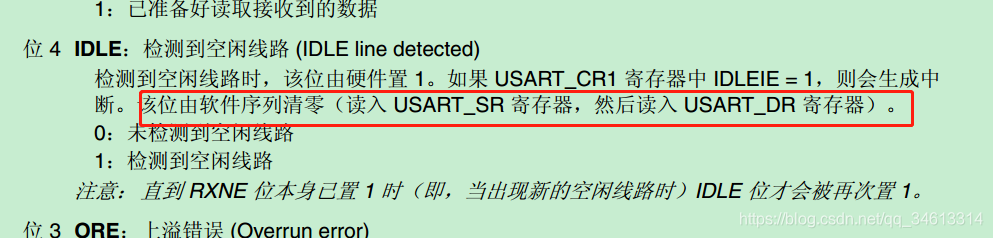
- USART_IT_IDLE:读取到一帧数据产生中断
以前串口读取一帧数据的方法:收到数据后重置定时器的值,等到定时器超时的时候就知道一帧数据读取完了,不过今天有了新的方法,我们可以从USART_IT_IDLE来判断是否读取完成了一帧数据。
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// 打开串口GPIO的时钟
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
// 打开串口外设的时钟
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
// 将USART Tx的GPIO配置为推挽复用模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将USART Rx的GPIO配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
// 配置 针数据字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(DEBUG_USARTx, &USART_InitStructure);
// 串口中断优先级配置
NVIC_Configuration();
// 使能串口接收中断
USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE);
USART_ITConfig(DEBUG_USARTx, USART_IT_IDLE, ENABLE);
// 使能串口
USART_Cmd(DEBUG_USARTx, ENABLE);
}
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
USART_ClearITPendingBit(USART1, USART_IT_RXNE); //只USART_ReceiveData也可以
gUart1.rbuf[gUart1.length++]=USART_ReceiveData(USART1);
}
else if(USART_GetITStatus(USART1, USART_IT_IDLE) != RESET)
{
USART1->SR;
USART1->DR;
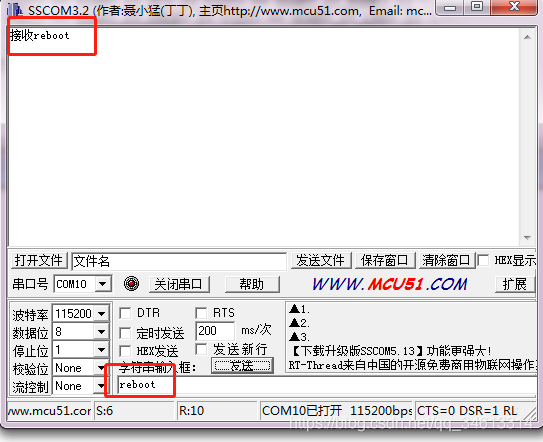
printf("接收%s",gUart1.rbuf);
gUart1.length=0;
}
}
- 特别要注意的是,USART_IT_IDLE标志位清零是读SR寄存器,然后读DR寄存器,用USART_ClearITPendingBit()或者直接对寄存器操作都是不行的