kinect SDK的编译要求cmake3.9以上,
Ubuntu16.04的操作与Ubuntu18.04一样。另外,也可以采用官方的apt安装方式,自己编译可以在源码中编写自己需要的东西。
1.下载官方SDK
git clone -b v1.2.0 https://github.com/microsoft/Azure-Kinect-Sensor-SDK.git
2.下载libdepthengine.so.2.0文件
到这个网站中下载libk4a1.2里的deb文件:https://packages.microsoft.com/ubuntu/18.04/prod/pool/main/libk/libk4a1.2/
解压缩deb文件,获得libdepthengine.so.2.0,然后把libdepthengine.so.2.0复制到/usr/lib/x86_64-linux-gnu/文件夹中
Ctrl+alt+t终端按照如下输入:
sudo cp -r 要复制的文件的路径 复制的目标文件夹
sudo cp -r /xxx/xxx/桌面/a /xxx/xxx/xxx3.下载依赖项目
sudo ./scripts/bootstrap-ubuntu.sh

4.编译之前需要修改两个文件
不然cmake会失败
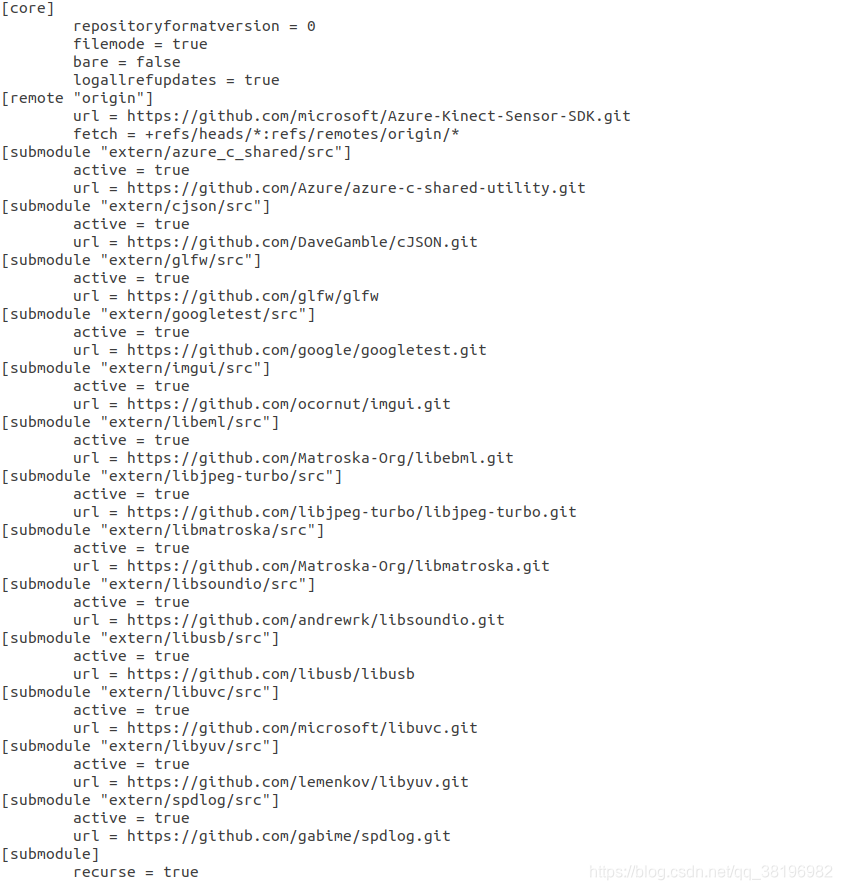
1)打开/Azure-Kinect-Sensor-SDK目录下的.gitmodules文件,将其中所有的url改为github上的,此处一般只需要修改extern/libyuv/src对应的url,最终的结果如下:

2)打开/Azure-Kinect-Sensor-SDK/.git文件夹下的config文件,将其中所有的url改为github上的,此处一般只需要修改extern/libyuv/src对应的url,最终的结果如下:
5.编译
可先在终端输入cmake --version查看版本,要保证cmake版本3.9以上
1)mkdir build
2)cd build
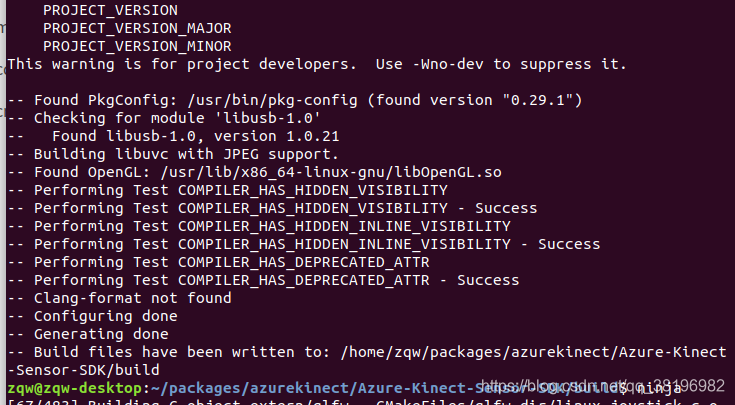
3)cmake .. -GNinja
cmake开始之后可能会提示一些失败,不用管,耐心等待即可
这一步可能需要很长时间,且每次可能只会成功克隆几个,需要不停的重复cmake .. -GNinja,若始终失败,可找打其对应得网址克隆下来,然后直接放到相应的文件夹。
如:正克隆到extern/libyuv/src,始终无法成功,可以去其对应得网址https://github.com/lemenkov/libyuv.git下载
然后在extern/libyuv下新建src文件夹,将下载的文件放到该文件夹下。
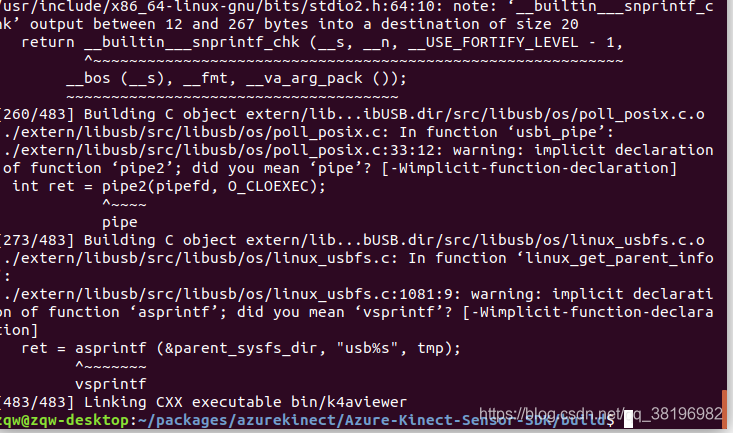
4)ninja
5.打开k4aviewer
继续输入sudo ./bin/k4aviewer,并连接kinect
without root
要想不用root也可以直接使用设备,需要进行如下操作:
进入Azure Kinect sdk 源码根目录中 scripts 文件夹,复制99-k4a.rules文件至/etc/udev/rules.d/
sudo cp scripts/99-k4a.rules /etc/udev/rules.d/.