yolov8-pose关键点检测
可参考官方文档的细节说明
https://docs.ultralytics.com/tasks/pose/#train
https://docs.ultralytics.com/modes/predict/
https://docs.ultralytics.com/datasets/pose/coco8-pose/#dataset-yaml
人体关键点的评估指标
https://zhuanlan.zhihu.com/p/646159957
一、数据集制作
参考:
https://blog.csdn.net/WYKB_Mr_Q/article/details/132035597
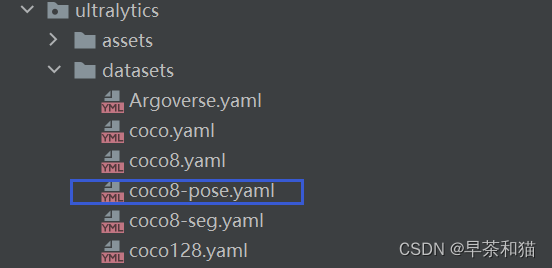
官网代码中提供了pose关键点检测的示例数据集,名为 coco8-pose.yaml, 我们可以根据里面的网址,将数据集下载下来,看一看具体的标注格式要求。
coco8-pose.yaml文件
# Ultralytics YOLO 🚀, AGPL-3.0 license
# COCO8-pose dataset (first 8 images from COCO train2017) by Ultralytics
# Example usage: yolo train data=coco8-pose.yaml
# parent
# ├── ultralytics
# └── datasets
# └── coco8-pose ← downloads here (1 MB)
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: ../datasets/coco8-pose # dataset root dir
train: images/train # train images (relative to 'path') 4 images
val: images/val # val images (relative to 'path') 4 images
test: # test images (optional)
# Keypoints
kpt_shape: [17, 3] # number of keypoints, number of dims (2 for x,y or 3 for x,y,visible)
flip_idx: [0, 2, 1, 4, 3, 6, 5, 8, 7, 10, 9, 12, 11, 14, 13, 16, 15]
# 修改你的检测类别
names:
0: person
# Download script/URL (optional)
download: https://ultralytics.com/assets/coco8-pose.zip
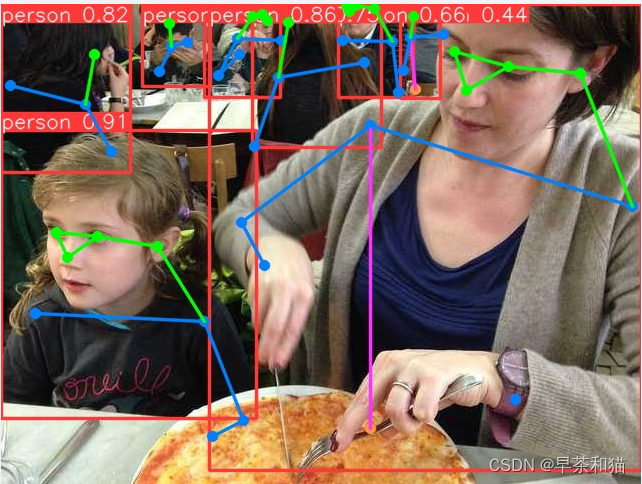
coco8-pose的数据标注格式和标注图片如下所示。我们先来看下标注格式,这个文件是 .txt 结尾的文件,并且里面共有56个数据。
第一个数据是0,表示该目标的类别,为person;接下来的四个数据,表示矩形框的坐标;后面还有51个数据,为17*3, 表示17个关键点的坐标及是否可见。
其中 0.00000 表示没有显露出不可见,1.00000 表示被遮挡不可见,2.00000 表示可见。由于这个图片的下半身不可见,所以标注数据中后面几个点的坐标数据和标签都为 0.00000.

所以你的数据集存放格式为
your dataset
---images
---train
---1.jpg
---2.jpg
...
---val
---6.jpg
---7.jpg
...
---labels
---train
---1.txt
---2.txt
...
---val
---6.txt
---7.txt
...
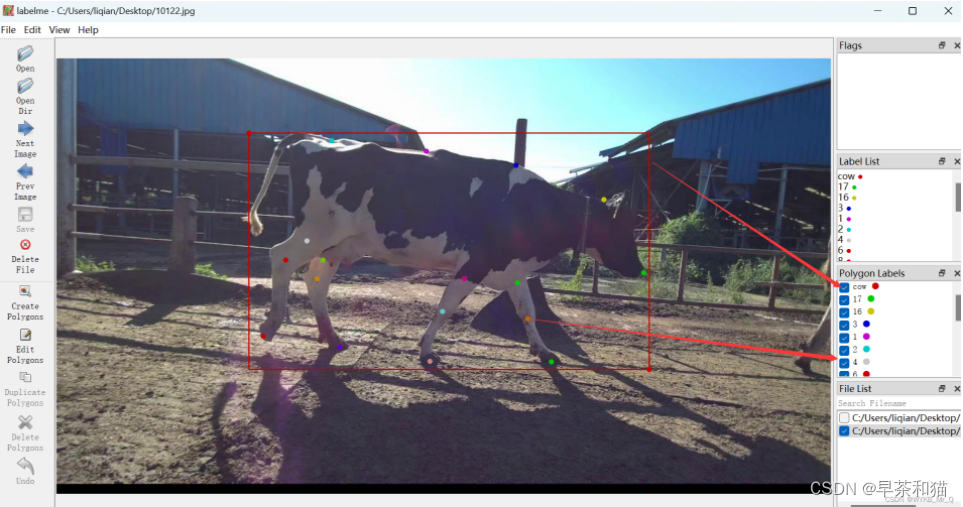
示例,使用 “labelme” 软件对奶牛的关键点进行标注
在标注时,我们首先要注意几点:
第一,标注关键点时,要先使用矩形框框出目标,再标注关键点;
第二,关键点不用固定的顺序,但每张图像都要保持一致。换句话说1号点是鼻子时,所有的图像1号点都应当是鼻子;
第三,被遮挡的点也应当标记出来;
第四,由于labelme无法标注关键点是否可见,默认为1.00000,这里我们不做处理,后续将其全部更改为2.00000,即可。
图像中,矩形框设置lable,为你自己的数据类型,接下来的点可以直接标注1,2,3 …比较方便。如果这里你想到,还有骨架呢,点和点之间的连线,那不用着急,这里不需要标注点和点的连线。那个连线只是可视化部分,为了方便观察绘制的。咱们这里主要就是预测关键点,其他的不用管即可。

通过标注关键点和矩形框,我们得到了符合 labelme 输出结果的 .json 文件,然后我们需要将其转化为 .txt 文件。这里我们分两步走,先将lableme输出结果转化为coco格式,再将其转化为yolo格式。
lableme转coco格式
以下是转化为coco格式的代码。我们需要将数据集提前划分为训练集和测试集,然后处理两次就可以了。以训练集为例,先将labelme标注的 .json 文件放入json文件夹中,新建一个 coco 文件夹,用来存放输出结果。
在以下代码中,我们需要更改第209行-212行的内容,将default=“cow”中的cow改成你自己的类别,第212行的17改为你自己标注的关键点数量。
import os
import sys
import glob
import json
import argparse
import numpy as np
from tqdm import tqdm
from labelme import utils
class Labelme2coco_keypoints():
def __init__(self, args):
"""
Lableme 关键点数据集转 COCO 数据集的构造函数:
Args
args:命令行输入的参数
- class_name 根类名字
"""
self.classname_to_id = {args.class_name: 1}
self.images = []
self.annotations = []
self.categories = []
self.ann_id = 0
self.img_id = 0
def save_coco_json(self, instance, save_path):
json.dump(instance, open(save_path, 'w', encoding='utf-8'), ensure_ascii=False, indent=1)
def read_jsonfile(self, path):
with open(path, "r", encoding='utf-8') as f:
return json.load(f)
def _get_box(self, points):
min_x = min_y = np.inf
max_x = max_y = 0
for x, y in points:
min_x = min(min_x, x)
min_y = min(min_y, y)
max_x = max(max_x, x)
max_y = max(max_y, y)
return [min_x, min_y, max_x - min_x, max_y - min_y]
def _get_keypoints(self, points, keypoints, num_keypoints):
"""
解析 labelme 的原始数据, 生成 coco 标注的 关键点对象
例如:
"keypoints": [
67.06149888292556, # x 的值
122.5043507571318, # y 的值
1, # 相当于 Z 值,如果是2D关键点 0:不可见 1:表示可见。
82.42582269256718,
109.95672933232304,
1,
...,
],
"""
if points[0] == 0 and points[1] == 0:
visable = 0
else:
visable = 1
num_keypoints += 1
keypoints.extend([points[0], points[1], visable])
return keypoints, num_keypoints
def _image(self, obj, path):
"""
解析 labelme 的 obj 对象,生成 coco 的 image 对象
生成包括:id,file_name,height,width 4个属性
示例:
{
"file_name": "training/rgb/00031426.jpg",
"height": 224,
"width": 224,
"id": 31426
}
"""
image = {}
img_x = utils.img_b64_to_arr(obj['imageData']) # 获得原始 labelme 标签的 imageData 属性,并通过 labelme 的工具方法转成 array
image['height'], image['width'] = img_x.shape[:-1] # 获得图片的宽高
# self.img_id = int(os.path.basename(path).split(".json")[0])
self.img_id = self.img_id + 1
image['id'] = self.img_id
image['file_name'] = os.path.basename(path).replace(".json", ".jpg")
return image
def _annotation(self, bboxes_list, keypoints_list, json_path):
"""
生成coco标注
Args:
bboxes_list: 矩形标注框
keypoints_list: 关键点
json_path:json文件路径
"""
if len(keypoints_list) != args.join_num * len(bboxes_list):
print('you loss {} keypoint(s) with file {}'.format(args.join_num * len(bboxes_list) - len(keypoints_list), json_path))
print('Please check !!!')
sys.exit()
i = 0
for object in bboxes_list:
annotation = {}
keypoints = []
num_keypoints = 0
label = object['label']
bbox = object['points']
annotation['id'] = self.ann_id
annotation['image_id'] = self.img_id
annotation['category_id'] = int(self.classname_to_id[label])
annotation['iscrowd'] = 0
annotation['area'] = 1.0
annotation['segmentation'] = [np.asarray(bbox).flatten().tolist()]
annotation['bbox'] = self._get_box(bbox)
for keypoint in keypoints_list[i * args.join_num: (i + 1) * args.join_num]:
point = keypoint['points']
annotation['keypoints'], num_keypoints = self._get_keypoints(point[0], keypoints, num_keypoints)
annotation['num_keypoints'] = num_keypoints
i += 1
self.ann_id += 1
self.annotations.append(annotation)
def _init_categories(self):
"""
初始化 COCO 的 标注类别
例如:
"categories": [
{
"supercategory": "hand",
"id": 1,
"name": "hand",
"keypoints": [
"wrist",
"thumb1",
"thumb2",
...,
],
"skeleton": [
]
}
]
"""
for name, id in self.classname_to_id.items():
category = {}
category['supercategory'] = name
category['id'] = id
category['name'] = name
# 17 个关键点数据
category['keypoint'] = [str(i + 1) for i in range(args.join_num)]
self.categories.append(category)
def to_coco(self, json_path_list):
"""
Labelme 原始标签转换成 coco 数据集格式,生成的包括标签和图像
Args:
json_path_list:原始数据集的目录
"""
self._init_categories()
for json_path in tqdm(json_path_list):
obj = self.read_jsonfile(json_path) # 解析一个标注文件
self.images.append(self._image(obj, json_path)) # 解析图片
shapes = obj['shapes'] # 读取 labelme shape 标注
bboxes_list, keypoints_list = [], []
for shape in shapes:
if shape['shape_type'] == 'rectangle': # bboxs
bboxes_list.append(shape) # keypoints
elif shape['shape_type'] == 'point':
keypoints_list.append(shape)
self._annotation(bboxes_list, keypoints_list, json_path)
keypoints = {}
keypoints['info'] = {'description': 'Lableme Dataset', 'version': 1.0, 'year': 2021}
keypoints['license'] = ['BUAA']
keypoints['images'] = self.images
keypoints['annotations'] = self.annotations
keypoints['categories'] = self.categories
return keypoints
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument("--class_name", default="cow", help="class name", type=str)
parser.add_argument("--input", default="./json", help="json file path (labelme)", type=str)
parser.add_argument("--output", default="./coco", help="output file path (coco format)", type=str)
parser.add_argument("--join_num", default=17, help="number of join", type=int)
# parser.add_argument("--ratio", help="train and test split ratio", type=float, default=0.5)
args = parser.parse_args()
labelme_path = args.input
saved_coco_path = args.output
json_list_path = glob.glob(labelme_path + "/*.json")
print('{} for json files'.format(len(json_list_path)))
print('Start transform please wait ...')
l2c_json = Labelme2coco_keypoints(args) # 构造数据集生成类
# 生成coco类型数据
keypoints = l2c_json.to_coco(json_list_path)
l2c_json.save_coco_json(keypoints, os.path.join(saved_coco_path, "keypoints.json"))
coco格式转yolo格式
以下是转化为yolo格式的代码。我们需要新建一个 txt 文件夹,用来存放输出结果。如果上面你的数据存放位置和我的一样,那就不用修改代码,如果有差异,就更改第12行-第17行的输入数据和输出位置即可。
# COCO 格式的数据集转化为 YOLO 格式的数据集
# --json_path 输入的json文件路径
# --save_path 保存的文件夹名字,默认为当前目录下的labels。
import os
import json
from tqdm import tqdm
import argparse
parser = argparse.ArgumentParser()
# 这里根据自己的json文件位置,换成自己的就行
parser.add_argument('--json_path',
default='coco/keypoints.json', type=str,
help="input: coco format(json)")
# 这里设置.txt文件保存位置
parser.add_argument('--save_path', default='txt', type=str,
help="specify where to save the output dir of labels")
arg = parser.parse_args()
def convert(size, box):
dw = 1. / (size[0])
dh = 1. / (size[1])
x = box[0] + box[2] / 2.0
y = box[1] + box[3] / 2.0
w = box[2]
h = box[3]
x = round(x * dw, 6)
w = round(w * dw, 6)
y = round(y * dh, 6)
h = round(h * dh, 6)
return (x, y, w, h)
if __name__ == '__main__':
json_file = arg.json_path # COCO Object Instance 类型的标注
ana_txt_save_path = arg.save_path # 保存的路径
data = json.load(open(json_file, 'r'))
if not os.path.exists(ana_txt_save_path):
os.makedirs(ana_txt_save_path)
id_map = {} # coco数据集的id不连续!重新映射一下再输出!
with open(os.path.join(ana_txt_save_path, 'classes.txt'), 'w') as f:
# 写入classes.txt
for i, category in enumerate(data['categories']):
f.write(category['name']+"\n")
id_map[category['id']] = i
# print(id_map)
# 这里需要根据自己的需要,更改写入图像相对路径的文件位置。
# list_file = open(os.path.join(ana_txt_save_path, 'train2017.txt'), 'w')
for img in tqdm(data['images']):
filename = img["file_name"]
img_width = img["width"]
img_height = img["height"]
img_id = img["id"]
head, tail = os.path.splitext(filename)
ana_txt_name = head + ".txt" # 对应的txt名字,与jpg一致
f_txt = open(os.path.join(ana_txt_save_path, ana_txt_name), 'w')
for ann in data['annotations']:
if ann['image_id'] == img_id:
box = convert((img_width, img_height), ann["bbox"])
f_txt.write("%s %s %s %s %s" % (id_map[ann["category_id"]], box[0], box[1], box[2], box[3]))
counter=0
for i in range(len(ann["keypoints"])):
if ann["keypoints"][i] == 2 or ann["keypoints"][i] == 1 or ann["keypoints"][i] == 0:
f_txt.write(" %s " % format(ann["keypoints"][i] + 1,'6f'))
counter=0
else:
if counter==0:
f_txt.write(" %s " % round((ann["keypoints"][i] / img_width),6))
else:
f_txt.write(" %s " % round((ann["keypoints"][i] / img_height),6))
counter+=1
f_txt.write("\n")
f_txt.close()
划分数据集
from sklearn.model_selection import train_test_split
import os
import shutil
import cv2
from pathlib import Path
def split_train_val(train_path_set,val_path_set):
total_files=[]
for filename in os.listdir(train_path_set):
total_files.append(filename)
#test_size为训练集和测试集的比例
train_files, val_files = train_test_split(total_files, test_size=0.1, random_state=42)
save_dir=Path(val_path_set)
if save_dir.is_dir():
for j in range(len(val_files)):
val_path1 = train_path_set + '\\' + val_files[j]
shutil.move(val_path1, val_path_set)
else:
os.makedirs(save_dir)
for j in range(len(val_files)):
val_path1 = train_path_set + '\\' + val_files[j]
shutil.move(val_path1, val_path_set)
if __name__ == '__main__':
train_path = r'D:\Dataset\uav\uav0000308_01380' # 图片路径
val_path = r'D:\Dataset\uav\val' # 划分测试集存放路径
split_train_val(train_path,val_path)
# for set in os.listdir(train_path):
# train_path_set=train_path+'\\'+set
# val_path_set=val_path+'\\'+set
# split_train_val(train_path_set, val_path_set)
print("划分完成!")
根据已经划分好的labels或者图片,移动对应的图片或者labels
from sklearn.model_selection import train_test_split
import os
import shutil
#move json
val_xml_path=r'\coco_kpt_format\txt\val'
img_path=r'\coco_kpt_format\images\train'
move_path=r'\coco_kpt_format\images\val'
for filename in os.listdir(img_path):
for filename2 in os.listdir(val_xml_path):
img_list=filename.split('.')
xml_list=filename2.split('.')
if len(img_list)>2:
img_name=''
xml_name=''
for i in range(len(img_list)-1):
img_name=img_name+img_list[i]
for i in range(len(xml_list)-1):
xml_name=xml_name+xml_list[i]
if img_name==xml_name:
shutil.move(img_path + '\\' + filename, move_path
else:
if filename.split('.')[0]==filename2.split('.')[0]:
shutil.move(img_path + '\\' + filename, move_path)
二、训练
可直接通过yaml文件从头开始训练
yolo pose train data=coco8-pose.yaml model=yolov8n-pose.yaml epochs=100 imgsz=640
也可通过官方提供的预训练模型进行训练
yolo pose train data=coco8-pose.yaml model=yolov8n-pose.pt epochs=100 imgsz=640
三、预测图片
yolo pose predict model=path/to/best.pt source='images/bus.jpg' # predict with custom model
四、导出图片
yolo export model=path/to/best.pt format=onnx # export custom trained model
五、代码分析
yolov8的关键点检测是一个top-bottom的模式,先检测到目标框再预测目标框内的关键点。
我们来总结一下v8关键点的做法,非常的简单。
假设你的输入的batch是8。
在这个batch上一共有14个正样本检测框。
每个检测框里有n个你要预测的关键点。
你的正负样本匹配策咯中topk设置为了10。
1,通过v8检测的正负样本匹配策咯后,获取到mask从检测框的预测分支【8,8400,4】的特征图上得到【140,4】的输出。
2,关键点的预测分支为【8,8400,n,3】,n即为每个框内需要预测的n个关键点。
3,根据第一步获取到的正样本mask,我们可以提取到【140,n,3】的输出,即每个正样本预测框内对应的n个关键点。
4,再将gt关键点【14,n,3】每一个复制10遍对应预测的【140,n,3】,计算直接回归的oks关键点loss。
1、loss计算
feats, pred_kpts = preds if isinstance(preds[0], list) else preds[1]
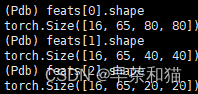
feats中包括以下内容
batch=16,65=64(边框)+1(类别),(80,80),(40,40),(20,20)为特征图大小
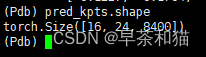
pred_kpts 包括以下内容
batch=16,24=8x3(8为此次预测的关键点数量,根据你所预测的数量变化;3为每个关键点包含的内容,即坐标x,y和是否可见visualable)
交换两个维度的位置
pred_kpts = pred_kpts.permute(0, 2, 1).contiguous()
对预测关键点进行编码

pred_kpts = self.kpts_decode(anchor_points, pred_kpts.view(batch_size, -1, *self.kpt_shape)) # (b, h*w, 17, 3)
将所有的点的状态置为2,即可见点。

def kpts_decode(self, anchor_points, pred_kpts):
"""Decodes predicted keypoints to image coordinates."""
y = pred_kpts.clone()
y[..., :2] *= 2.0
y[..., 0] += anchor_points[:, [0]] - 0.5
y[..., 1] += anchor_points[:, [1]] - 0.5
return y
获取该batch中gt关键点并缩放到原图大小。
keypoints = batch['keypoints'].to(self.device).float().clone()
keypoints[..., 0] *= imgsz[1]
keypoints[..., 1] *= imgsz[0]
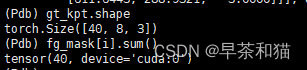
挑选正样本的目标框中的gt关键点并映射到特征图大小。
gt_kpt = keypoints[batch_idx.view(-1) == i][idx] # (n, 51)
gt_kpt[..., 0] /= stride_tensor[fg_mask[i]]
gt_kpt[..., 1] /= stride_tensor[fg_mask[i]]
计算gt框的面积
area = xyxy2xywh(target_bboxes[i][fg_mask[i]])[:, 2:].prod(1, keepdim=True)
从特征图上获取对应gt框的预测关键点
pred_kpt = pred_kpts[i][fg_mask[i]]
计算点的位置loss和得分值loss


loss[1] += self.keypoint_loss(pred_kpt, gt_kpt, kpt_mask, area) # pose loss
# kpt_score loss
if pred_kpt.shape[-1] == 3:
loss[2] += self.bce_pose(pred_kpt[..., 2], kpt_mask.float()) # keypoint obj loss
回归位置loss用的是yolo-pose的oks loss,非heatmap的方法而是直接回归。
class KeypointLoss(nn.Module):
def __init__(self, sigmas) -> None:
super().__init__()
self.sigmas = sigmas
def forward(self, pred_kpts, gt_kpts, kpt_mask, area):
"""Calculates keypoint loss factor and Euclidean distance loss for predicted and actual keypoints."""
d = (pred_kpts[..., 0] - gt_kpts[..., 0]) ** 2 + (pred_kpts[..., 1] - gt_kpts[..., 1]) ** 2
kpt_loss_factor = (torch.sum(kpt_mask != 0) + torch.sum(kpt_mask == 0)) / (torch.sum(kpt_mask != 0) + 1e-9)
# e = d / (2 * (area * self.sigmas) ** 2 + 1e-9) # from formula
e = d / (2 * self.sigmas) ** 2 / (area + 1e-9) / 2 # from cocoeval
return kpt_loss_factor * ((1 - torch.exp(-e)) * kpt_mask).mean()
对应于每个边界框,我们存储整个姿态信息。针对每一个单独的关键点计算OKS,并累加到最终的OKS损失或者关键点IoU,即:


# Criterion class for computing training losses
class v8PoseLoss(v8DetectionLoss):
def __init__(self, model): # model must be de-paralleled
super().__init__(model)
self.kpt_shape = model.model[-1].kpt_shape
self.bce_pose = nn.BCEWithLogitsLoss()
is_pose = self.kpt_shape == [17, 3]
nkpt = self.kpt_shape[0] # number of keypoints
sigmas = torch.from_numpy(OKS_SIGMA).to(self.device) if is_pose else torch.ones(nkpt, device=self.device) / nkpt
self.keypoint_loss = KeypointLoss(sigmas=sigmas)
def __call__(self, preds, batch):
"""Calculate the total loss and detach it."""
#初始化loss,包括box, cls, dfl, kpt_location, kpt_visibility
loss = torch.zeros(5, device=self.device)
#feats返回检测的三个特征图
feats, pred_kpts = preds if isinstance(preds[0], list) else preds[1]
pred_distri, pred_scores = torch.cat([xi.view(feats[0].shape[0], self.no, -1) for xi in feats], 2).split(
(self.reg_max * 4, self.nc), 1)
# b, grids, ..
pred_scores = pred_scores.permute(0, 2, 1).contiguous()
pred_distri = pred_distri.permute(0, 2, 1).contiguous()
pred_kpts = pred_kpts.permute(0, 2, 1).contiguous()
dtype = pred_scores.dtype
imgsz = torch.tensor(feats[0].shape[2:], device=self.device, dtype=dtype) * self.stride[0] # image size (h,w)
anchor_points, stride_tensor = make_anchors(feats, self.stride, 0.5)
# targets
batch_size = pred_scores.shape[0]
batch_idx = batch['batch_idx'].view(-1, 1)
targets = torch.cat((batch_idx, batch['cls'].view(-1, 1), batch['bboxes']), 1)
targets = self.preprocess(targets.to(self.device), batch_size, scale_tensor=imgsz[[1, 0, 1, 0]])
gt_labels, gt_bboxes = targets.split((1, 4), 2) # cls, xyxy
mask_gt = gt_bboxes.sum(2, keepdim=True).gt_(0)
# pboxes
pred_bboxes = self.bbox_decode(anchor_points, pred_distri) # xyxy, (b, h*w, 4)
pred_kpts = self.kpts_decode(anchor_points, pred_kpts.view(batch_size, -1, *self.kpt_shape)) # (b, h*w, 17, 3)
_, target_bboxes, target_scores, fg_mask, target_gt_idx = self.assigner(
pred_scores.detach().sigmoid(), (pred_bboxes.detach() * stride_tensor).type(gt_bboxes.dtype),
anchor_points * stride_tensor, gt_labels, gt_bboxes, mask_gt)
target_scores_sum = max(target_scores.sum(), 1)
# cls loss
# loss[1] = self.varifocal_loss(pred_scores, target_scores, target_labels) / target_scores_sum # VFL way
loss[3] = self.bce(pred_scores, target_scores.to(dtype)).sum() / target_scores_sum # BCE
# bbox loss
if fg_mask.sum():
target_bboxes /= stride_tensor
loss[0], loss[4] = self.bbox_loss(pred_distri, pred_bboxes, anchor_points, target_bboxes, target_scores,
target_scores_sum, fg_mask)
keypoints = batch['keypoints'].to(self.device).float().clone()
keypoints[..., 0] *= imgsz[1]
keypoints[..., 1] *= imgsz[0]
for i in range(batch_size):
if fg_mask[i].sum():
idx = target_gt_idx[i][fg_mask[i]]
gt_kpt = keypoints[batch_idx.view(-1) == i][idx] # (n, 51)
gt_kpt[..., 0] /= stride_tensor[fg_mask[i]]
gt_kpt[..., 1] /= stride_tensor[fg_mask[i]]
area = xyxy2xywh(target_bboxes[i][fg_mask[i]])[:, 2:].prod(1, keepdim=True)
pred_kpt = pred_kpts[i][fg_mask[i]]
kpt_mask = gt_kpt[..., 2] != 0
loss[1] += self.keypoint_loss(pred_kpt, gt_kpt, kpt_mask, area) # pose loss
# kpt_score loss
if pred_kpt.shape[-1] == 3:
loss[2] += self.bce_pose(pred_kpt[..., 2], kpt_mask.float()) # keypoint obj loss
loss[0] *= self.hyp.box # box gain
loss[1] *= self.hyp.pose / batch_size # pose gain
loss[2] *= self.hyp.kobj / batch_size # kobj gain
loss[3] *= self.hyp.cls # cls gain
loss[4] *= self.hyp.dfl # dfl gain
return loss.sum() * batch_size, loss.detach() # loss(box, cls, dfl)