Yolov8obb_kpt,旋转框+关键点检测,有向目标检测,判断目标正方向
在网友的建议之下,我尝试在v8obb的基础上写了一下有向旋转框检测算法。对于检测目标正方向这个问题我的思考是。
只需要给目标的正方向一个显著的关键点即可(如车的车头位置,船的船头位置),有了关键点,通过旋转框的中心点发出一条经过关键点的射线,那么这条射线的方向即可表示目标的正方向。
跟着这个思路,我们就可以着手开始做了,v8里有关键点检测,不过关键点检测是基于常规的矩形框进行的,只需要在网络中额外增加一个预测关键点的分支即可,同理旋转框_关键点检测也只需要在旋转头部分额外增加一个预测关键点的分支即可,其他东西全部copy。
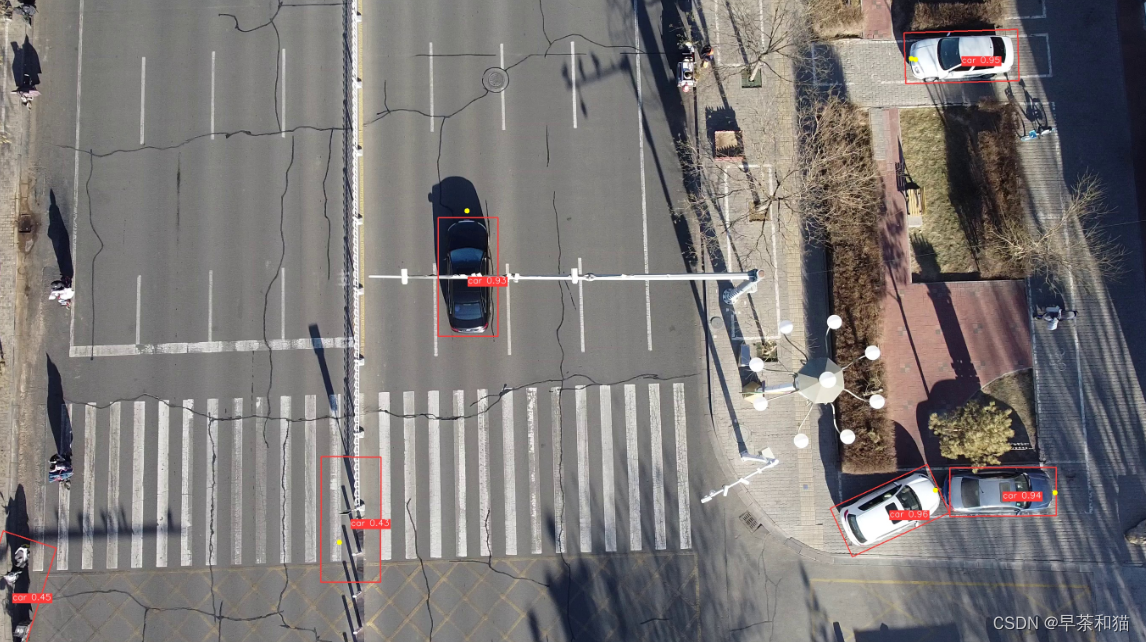
测试图
一、 数据标注和处理
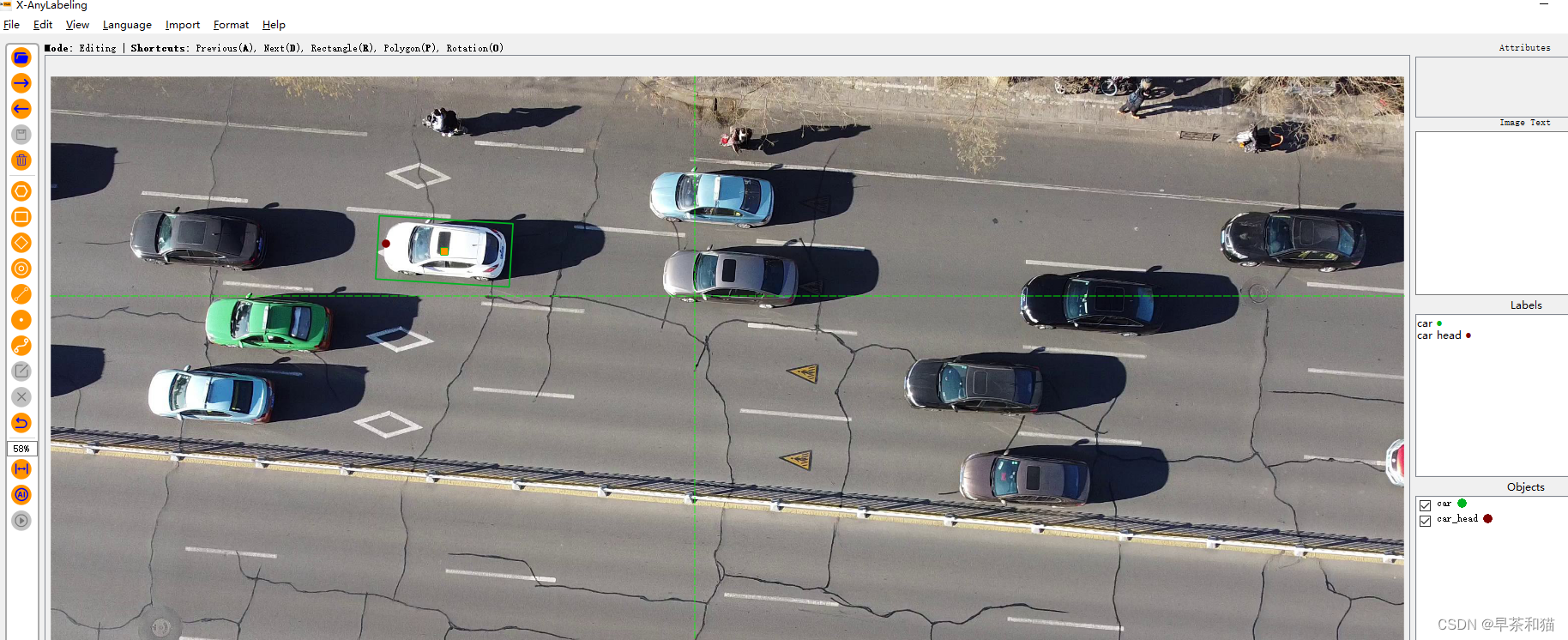
标注软件:X-AnyLabeling,可查阅博客进行安装使用
标注旋转框和关键点,生成json文件。
对于生成的json文件,需要将其转化为yolo可训练格式。转化脚本如下:
import json
import os
import numpy as np
# 转换成四点坐标
def rotatePoint(xc, yc, xp, yp, theta):
xoff = xp - xc;
yoff = yp - yc;
cosTheta = math.cos(theta)
sinTheta = math.sin(theta)
pResx = cosTheta * xoff + sinTheta * yoff
pResy = - sinTheta * xoff + cosTheta * yoff
return str(int(xc + pResx)), str(int(yc + pResy))
def check_points_in_rotated_boxes(points, boxes):
"""Check whether point is in rotated boxes
Args:
points (tensor): (1, L, 2) anchor points
boxes (tensor): [B, N, 5] gt_bboxes
eps (float): default 1e-9
Returns:
is_in_box (tensor): (B, N, L)
"""
print('boxes',boxes)
a = np.array(boxes[0])
b = np.array(boxes[1])
c = np.array(boxes[2])
d = np.array(boxes[3])
ab = b - a
ad = d - a
# [B, N, L, 2]
ap = points - a
# [B, N, L]
norm_ab = np.sum(ab * ab)
# [B, N, L]
norm_ad = np.sum(ad * ad)
# [B, N, L] dot product
ap_dot_ab = np.sum(ap * ab)
# [B, N, L] dot product
ap_dot_ad = np.sum(ap * ad)
# [B, N, L] <A, B> = |A|*|B|*cos(theta)
is_in_box = (ap_dot_ab >= 0) & (ap_dot_ab <= norm_ab) & (ap_dot_ad >= 0) & (
ap_dot_ad <= norm_ad)
return is_in_box
rotate_obj_cls_list=['car']
rotate_kpt_cls_list=['car_head']
#融合yolov8obb和yolov8-pose的标注格式生成标签txt文件,在yolov8obb的每个目标后添加该目标类的关键点,本脚本只添加唯一关键点以此来确定目标的朝向,如车头,船头等
#如果要检测旋转框内多个关键点,需要按关键点的顺序对应摆放,或者根据类别来判断。
def convert_coco_to_yolov8obb(annotations_dir, txt_output_dir):
files = os.listdir(annotations_dir)
print('files',files)
for file in files:
print('file', file)
file_name=file.split('.')[0]
output = txt_output_dir +'\\'+ file_name + '.txt'
txt_file = open(output, 'w')
with open(annotations_dir+'\\'+file, 'r') as f:
data = json.load(f)
if not os.path.exists(txt_output_dir):
os.makedirs(txt_output_dir)
print('data',data)
#把json里面所有的旋转框的关键点单独存放
rotate_list=[]
kpt_list=[]
for i in range(len(data['shapes'])):
for j in range(len(rotate_obj_cls_list)):
if data['shapes'][i]['label'] == rotate_obj_cls_list[j]:
rotate_list.append([data['shapes'][i]['points'],data['shapes'][i]['label'],j])
if data['shapes'][i]['label'] in rotate_kpt_cls_list:
kpt_list.append(data['shapes'][i]['points'])
#再匹配对应的关键点所属的旋转框并保存
for i in range(len(rotate_list)):
for j in range(len(kpt_list)):
if check_points_in_rotated_boxes(kpt_list[j],rotate_list[i][0])==True:
x0 = int(rotate_list[i][0][0][0])
y0 = int(rotate_list[i][0][0][1])
x1 = int(rotate_list[i][0][1][0])
y1 = int(rotate_list[i][0][1][1])
x2 = int(rotate_list[i][0][2][0])
y2 = int(rotate_list[i][0][2][1])
x3 = int(rotate_list[i][0][3][0])
y3 = int(rotate_list[i][0][3][1])
cls = rotate_list[i][1]
id = rotate_list[i][2]
kpt0 = int(kpt_list[j][0][0])
kpt1 = int(kpt_list[j][0][1])
txt_file.write("{} {} {} {} {} {} {} {} {} {} {} {} 2\n".format(x0, y0, x1, y1, x2, y2, x3, y3, cls, id,kpt0,kpt1))
print(check_points_in_rotated_boxes(kpt_list[j],rotate_list[i][0]))
if __name__ == '__main__':
annotations_dir = r"D:\BaiduNetdiskDownload\uav\labels"
txt_output_dir = r"D:\BaiduNetdiskDownload\uav\txt"
convert_coco_to_yolov8obb(annotations_dir, txt_output_dir)
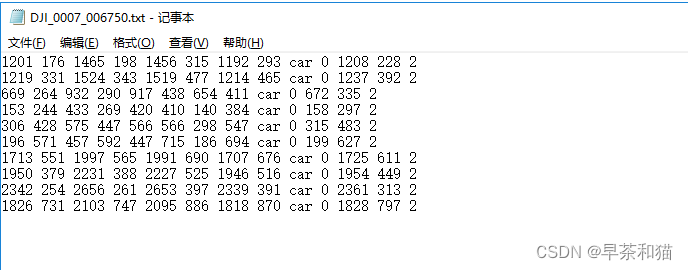
生成后的脚本如下:
前8个坐标为旋转框四个角点坐标,类别名称,类别id,关键点,是否可见(2)
目前并不考虑截断等其他情况,所以关键点全部设置为可见。