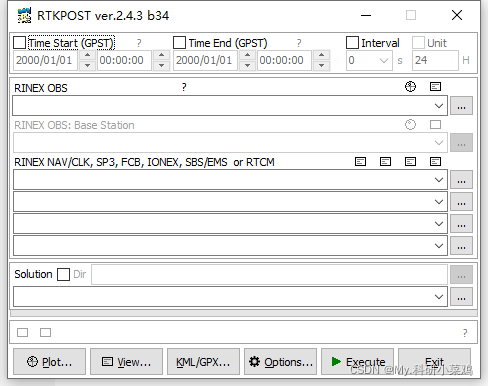
起始时间,移动站数据,基准站数据(距离基准站较近)。
基准站时间较长时可以使用gfzrnx进行GNSS数据的编辑转换和数据质量检测等工作
接收机可以实时接收但只能接收跟踪到的卫星的导航电文。下载的是后处理的一天以后才能得到的广播星历。
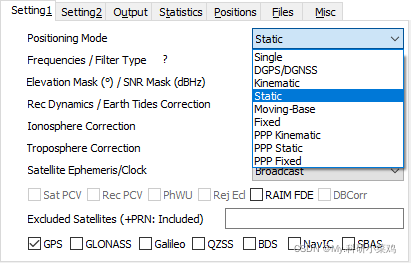
参数设置
伪距单点定位
伪距差分
动态载波相对定位
静态载波差分(得到毫米精度的相对位置关系)(如果只分析数据质量也可以假设,流动站为静态)
移动站基准站都有一定的移动性,在解算相对位置以后,解算天线姿态
fix约束坐标解算一些参数
下边是ppp动态静态和坐标约束的对流层等参数解算。
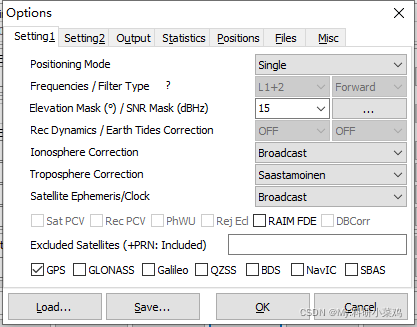
频率选择、前向解算/后向解算/前后向解算
高度角限制,可以从卫星可见性进行判断。
单频电离层改正只能用
接收机动态,ON表示输出加速度和速度
电离层改正
单频只能OFF或者广播星历模型BROAD
双频可以选择电离层组合LC
对流层改正
卫星星历、卫星钟差改正。(较近可以忽略)
距离较远就需要精密星历和精密的钟差改正。因此采用广播星历
完好性检验,算法不够稳健,在卫星质量不好的时候会有一个较好的结果,因此不勾选。
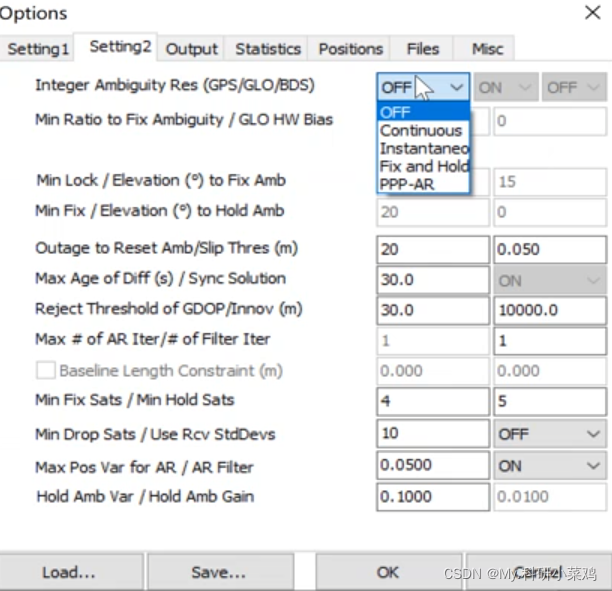
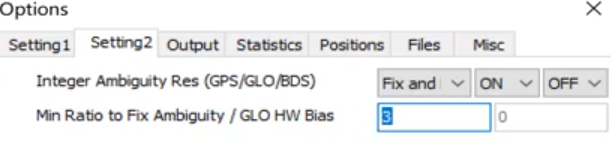
模糊度固定
模糊值固定模式,fix and hold 保存上个历元的模糊值,然后进行修正。
模糊值固定的指标一般选择3就可以了。
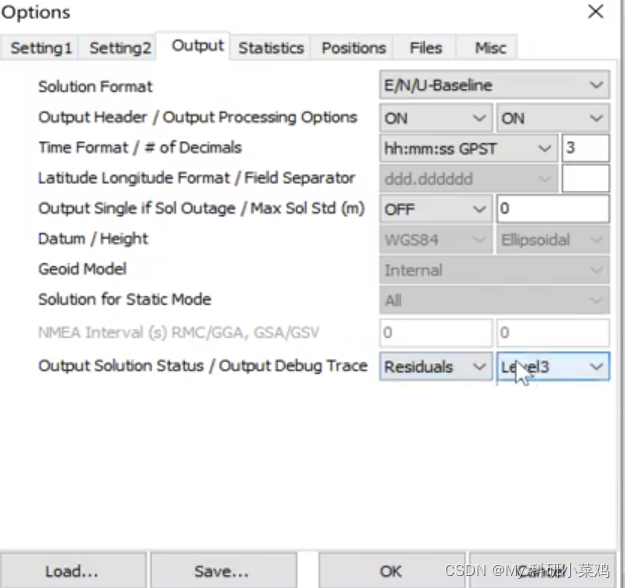
输出数据格式
是否输出头文件
时间格式
最后是是否输出中间参数值(便于调代码)
level输出文件的大小
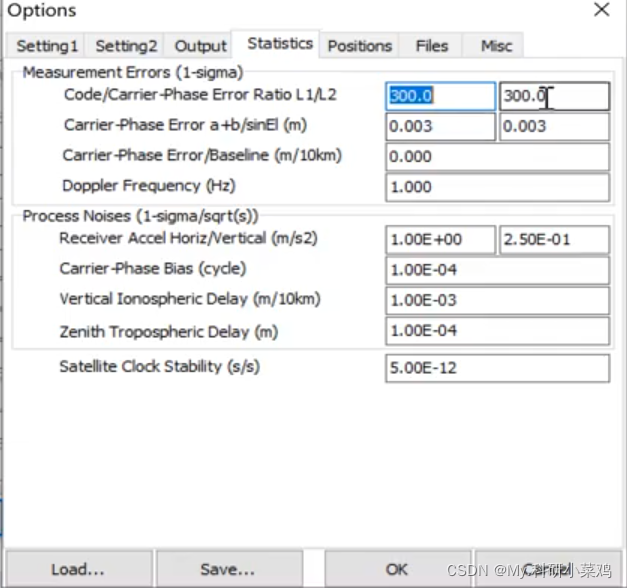
随机模型,主要是伪距载波的噪声定权。

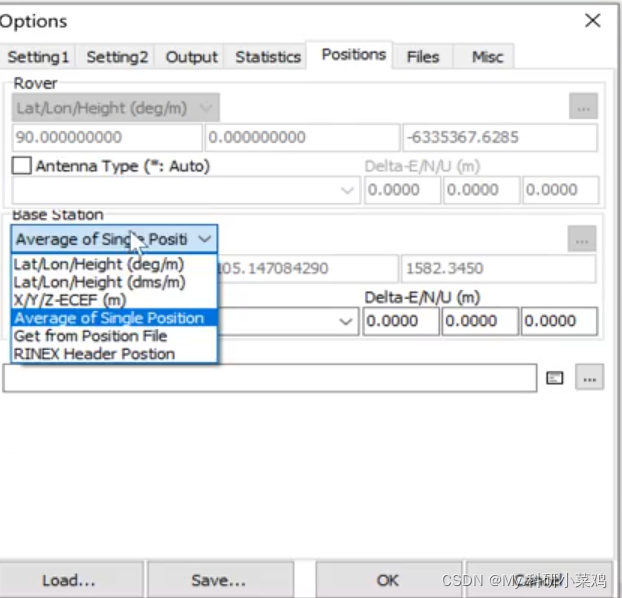
基准站的坐标如何得到。
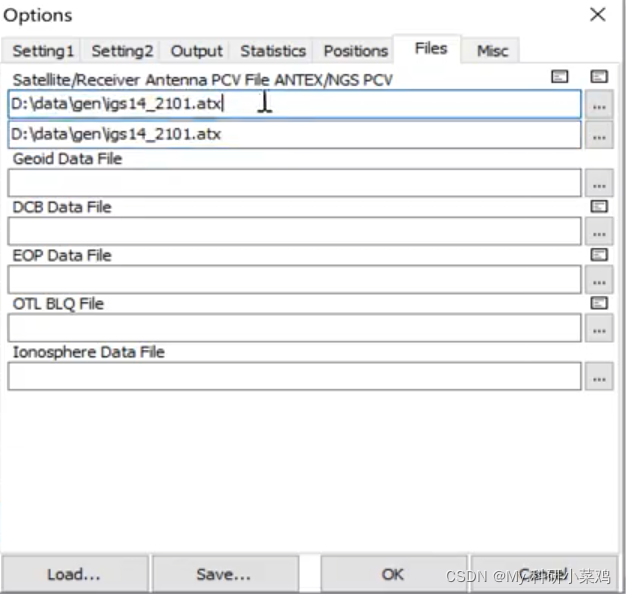
下边是天线类型
天线文件主要是ppp相对定位也会用到。
处理,Q等于1说明模糊度已经固定了。
解算结果文件
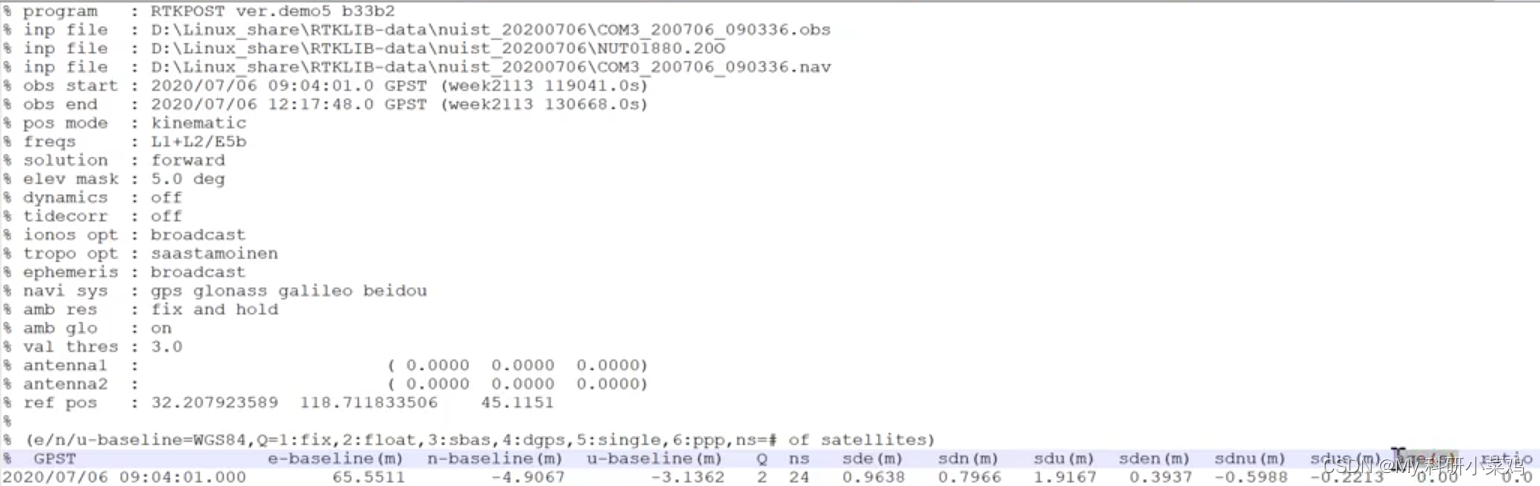
头文件
使用的程序
输入文件:流动站文件、基准站文件、星历文件
起始时间
结束时间
处理模型:动态
频率
解算方式:前向
高度角
接收机是否输出加速度和速度
电离层、对流层改正模型
星历类型:广播星历
选择的卫星系统
模糊度解算方法
模糊度固定评定指标》3
参考的基准站位置
正文
84坐标系下的基线长度
Q=1表示固定解
2:浮点解 3.增强解算4.差分GPS5.单点定位6.ppp
数据中
第一个表示时间 enu坐标系的基线长度、中误差、age表示基准站和流动站的时间差、ratio模糊度固定的参数,设定的是3大于三越大越好
结果
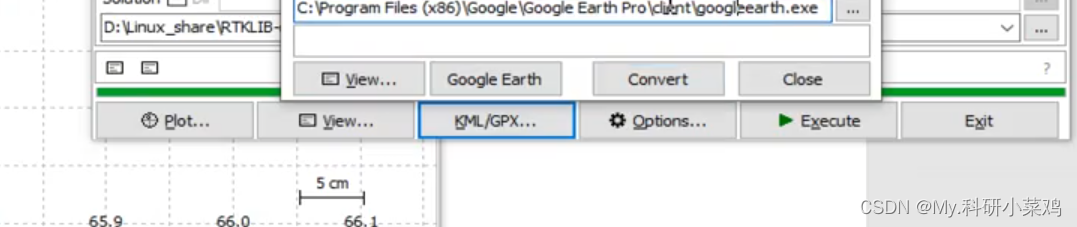
plot图像形式展示
view:查看原始数据
Kml:谷歌地图查看,转换成谷歌格式然后再谷歌地图打开。

解算出现的问题:
调试过程,解算完成后,plot查看定位结果,锁定出线问题的卫星时刻,查看卫星数量图、racial(是否参与解算)、天空图(高度角是否太低)、通过出问题时间从初始观测文件查看对应的卫星。
