提示:转载请注明出处,若本文无意侵犯到您的合法权益,请及时与作者联系。
一、表格式存储与值函数近似
1、维度灾难
在之前的学习中,我们学习的都是传统的强化学习方式,这些方法应用有限,特别是以Q-Learning为代表的表格式算法在处理问题时会存在瓶颈。表格式存储Q值实际上是一种穷举思想,适合于数量较小的离散的数据,但是当我们状态空间十分巨大且连续时,这种表格式存储就变得不合时宜。
这种就是强化学习发展过程中存在的“维度灾难”问题。
2、值函数近似
一种解决这类问题的方法就是价值函数近似(Value Function Approximation),简单来讲就是使用函数映射来代替表格式存储。
通过函数表示,我们就可以处理一个高维度的s,因为最后最后都会通过矩阵运算降维输出为单值的Q。如果我们就用函数w来统一表示函数f的参数,那么就有:
进行值函数近似模拟的关键就是找到这样的函数模拟工具
线性关系可以用常见的线性函数模拟,非线性关系可以使用神经网络来模拟。
使用神经网络来模拟值函数,就是将目前的深度学习技术与强化学习技术结合起来,成为了现在又焕发新生命力的深度强化学习领域。
这一类的代表研究就是Google Deep mind 团队推出的DQN算法,代表应用就是火爆一时的AlphaGo。
二、DQN是什么
DQN全称叫做Deep Q Network,是Google Deep mind 团队提出的一种融合了神经网络和 Q learning 的强化学习方法。
DQN算法的提出对于强化学习是一个里程碑式的发展,它解决了将神经网络用于传统强化学习的难点:
神经网络基于独立同分布数据的统计方法,而强化学习产生的数据样本是序列相关的,不是独立分布,学习的策略往往不够稳定。
DQN算法则使用了记忆回放机制(Memory Replay)来解决这个问题,这个机制也是深度强化学习领域一个非常重要的技巧。
三、Memory Replay的步骤
记忆回放机制(Memory Replay)是DQN算法中的一个核心机制,具体操作步骤如下:
一、初始化阶段:
初始化一块大小为N的内存空间D
初始化一个有着随机参数
的动作-状态模拟函数Q(神经网络eval_net)
初始化一个有着随机参数
的动作状态函数
(神经网络target_net)
二、在每步的学习阶段:
1、Agent以
-greedy选择一个动作a
2、获得Env反馈的立即回报、后继状态
3、将观测值、动作、立即回报、后继观测值组成的transition集合存储到D中,当达到空间最大值之后替换原来的采样样本。
(以下步骤可以以一个固定的频率来进行,不一定需要在每一步中)
4、从D中随机采样一个批量(Batch)的样本
5、计算这些样本的Q现实值:如果下一个步是终止步就直接等于立即回报,否则使用Bellman方程计算
6、使用(
7、每隔C步学习就将Q参数复制给
对应的DQN算法如下:
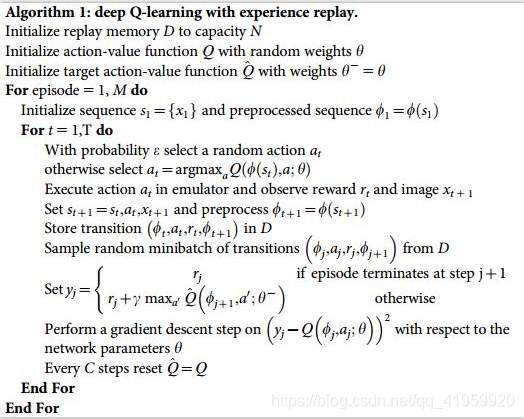
具体的代码示例可以参考我的博客莫烦Python代码实践(四)——DQN基础算法工程化解析
在这篇博客中使用DQN算法来解决走迷宫的案例,使用的是TensorFlow搭建的双层FNN神经网络。