揭秘OpenCV:探寻视觉世界的轮廓之谜
1. 介绍
1.1 什么是轮廓检测?
轮廓检测是计算机视觉领域的重要技术,它可以识别和描述图像中的形状和边界。在数字图像处理中,轮廓是由图像中强度变化明显的区域所形成的边界线。轮廓检测利用这些边界线来标识和测量对象的形状和结构。它在许多实际应用中起着至关重要的作用,包括目标识别、物体跟踪、图像增强等。
1.2 OpenCV 中的轮廓检测应用
OpenCV是一个开源的计算机视觉库,提供了丰富而强大的图像处理和计算机视觉算法。在OpenCV中,轮廓检测是一项基础而重要的功能,它被广泛应用于图像分析、目标检测、图像识别等领域。通过OpenCV的轮廓检测功能,可以对图像中的边缘信息进行提取和分析,从而实现对目标对象的轮廓识别和描述。这对于实现自动化的图像处理和分析任务至关重要。
通过OpenCV的轮廓检测功能,可以实现诸如形状识别、对象边界提取、轮廓匹配等应用。在实际工程中,轮廓检测在工业质检、医学影像分析、无人机航拍、智能交通等领域都有着广泛的应用前景。同时,基于OpenCV的轮廓检测可以结合其他计算机视觉技术,如图像分割、特征提取等,进一步提高图像处理和分析的准确性和效率。
通过整合OpenCV的轮廓检测功能,可以实现更加智能化的图像处理系统,并为诸如智能安防、工业机器人、智能交通等领域带来更多创新应用。在未来,随着计算机视觉技术的不断发展和完善,OpenCV的轮廓检测将在更多领域发挥关键作用,推动图像处理和计算机视觉技术与各行业的深度融合。
2. 准备工作
2.1 安装 OpenCV
在进行轮廓检测之前,首先需要安装 OpenCV ,这是一个用于计算机视觉的开源库,提供了各种图像处理和分析工具。你可以通过以下步骤安装 OpenCV:
Windows 用户:
- 使用 pip 安装:
pip install opencv-python
macOS 用户:
- 使用 Homebrew 安装:
brew install opencv
Linux 用户:
- 使用包管理器安装:
sudo apt-get install python-opencv
安装完成后,你可以验证安装是否成功,例如在 Python 中运行以下代码:
import cv2
print(cv2.__version__)
2.2 加载图像
在进行轮廓检测之前,我们需要加载一张待处理的图像。你可以使用 OpenCV 提供的函数 cv2.imread() 来加载图像文件,例如:
import cv2
# 读取图像
image = cv2.imread('image.jpg')
2.3 图像处理(转换图像颜色空间)
在进行轮廓检测之前,通常需要对图像进行预处理,其中一个常见的操作是转换图像的颜色空间。OpenCV 提供了一个方便的函数 cv2.cvtColor() 来进行颜色空间转换,例如将图像从 BGR 转换到灰度:
import cv2
# 将图像转换为灰度
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
2.4 表格描述
在图像处理过程中,我们可能需要对一些参数或者阈值进行调整,这时可以使用表格来描述这些参数的数值范围或者调整后的效果。下面是一个示例表格,用于描述图像处理过程中使用的阈值参数及其效果:
| 参数 | 数值范围 | 效果描述 |
|---|---|---|
| 阈值1 | 0-255 | 控制效果1 |
| 阈值2 | 0-100 | 控制效果2 |
通过以上几个步骤的准备工作,我们可以为后续的轮廓检测做好充分的准备。
3. 轮廓检测的基础知识
3.1 边缘检测算子
在进行轮廓检测之前,首先需要进行边缘检测,以便从图像中提取出目标物体的边界信息。边缘检测算子是实现这一目标的关键工具。常用的边缘检测算子包括:
-
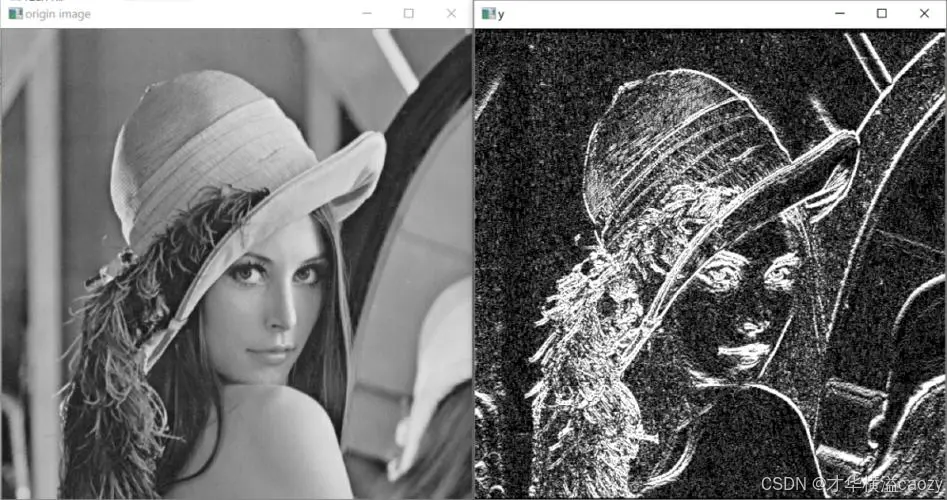
Sobel算子:用于在图像中检测边缘的一种基本算子,可以分别检测水平和垂直方向的边缘。
import cv2 import numpy as np img = cv2.imread('image.jpg', 0) edges_x = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=3) edges_y = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=3) edges = cv2.magnitude(edges_x, edges_y) -
Canny边缘检测:结合了多步骤的算法,包括高斯滤波、计算梯度、非最大抑制和双阈值化处理,得到高质量的边缘。
edges = cv2.Canny(img, threshold1, threshold2)
3.2 阈值化处理
在得到边缘图像后,通常需要进行阈值化处理,将灰度图像转换为二值图像,以便进一步分析和处理。阈值化处理通过设定一个阈值来将像素分为目标和背景两类。
ret, thresh = cv2.threshold(edges, threshold_value, max_value, cv2.THRESH_BINARY)
ret是找到的阈值;thresh是输出的二值图像。
3.3 轮廓检测函数
一旦得到了二值图像,就可以使用OpenCV提供的轮廓检测函数来识别图像中的对象轮廓。常用的函数包括:
-
cv2.findContours:用于在二值图像中查找轮廓。
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)contours是一个列表,每个元素都是一个轮廓,每个轮廓是一个Numpy数组。hierarchy可以用来表示轮廓的层级关系。
-
绘制轮廓:可以使用
cv2.drawContours函数将轮廓画在原始图像上。img_contours = cv2.drawContours(img.copy(), contours, -1, (0, 255, 0), 2)
在进行轮廓检测时,需要注意选择适当的边缘检测算子和阈值化方法,以及理解轮廓检测函数的参数和输出。通过这些基础知识,可以有效地在图像处理和计算机视觉应用中实现目标检测和识别任务。
以上是关于轮廓检测基础知识的详细介绍,包括了边缘检测算子的使用、阈值化处理的步骤以及OpenCV中常用的轮廓检测函数及其应用示例。
4. 轮廓特征
在图像处理和计算机视觉中,轮廓特征是对检测到的物体轮廓进行详细分析和描述的重要部分。通过使用OpenCV库,我们可以提取和计算出多种有用的轮廓特征,这些特征对于对象识别、形状分析以及机器视觉任务具有重要意义。
4.1 边界矩形
边界矩形是一个简单而常用的轮廓特征,它能够帮助我们快速了解物体的大致尺寸和位置。OpenCV提供了函数来计算包围轮廓的最小矩形,即边界矩形。边界矩形可以分为两种类型:外接矩形和最小面积矩形。
外接矩形可以通过以下代码获取:
import cv2
import numpy as np
# 假设contours是已经检测到的轮廓
x, y, w, h = cv2.boundingRect(contours)
最小面积矩形则需要使用 cv2.minAreaRect() 函数来计算,该函数返回一个带有信息的Box2D结构体。
4.2 圆形度
圆形度是一个用来描述轮廓形状接近圆形程度的特征。在实际应用中,圆形度可以帮助区分和识别不同形状的物体。圆形度通常定义为轮廓的面积与其周长的比值的倒数。
圆形度可以使用以下公式计算:
[ Roundness = \frac{4 \cdot \pi \cdot Area}{Perimeter^2} ]
其中,Area是轮廓的面积,Perimeter是轮廓的周长。在OpenCV中,可以通过以下代码计算圆形度:
area = cv2.contourArea(contour)
perimeter = cv2.arcLength(contour, True)
roundness = (4 * np.pi * area) / (perimeter * perimeter)
4.3 凸包
凸包是将轮廓点包围在内部的最小凸多边形。在某些情况下,我们可能需要识别物体的凸形状以进行后续处理或分析。OpenCV提供了函数来查找和绘制凸包,例如 cv2.convexHull()。
hull = cv2.convexHull(contour)
cv2.drawContours(image, [hull], -1, (0, 255, 0), 2)
4.4 轮廓的形状匹配
轮廓的形状匹配是一种比较两个轮廓形状相似程度的方法。形状匹配可以通过计算轮廓的Hu矩来实现,Hu矩是一组与平移、旋转和缩放无关的轮廓描述符。在OpenCV中,可以使用 cv2.matchShapes() 函数来计算两个轮廓之间的形状匹配度。
match = cv2.matchShapes(contour1, contour2, cv2.CONTOURS_MATCH_I1, 0.0)
5. 轮廓的高级技巧
在实际应用中,只会对图像进行简单的轮廓检测可能不足够,因此本篇博客将介绍一些轮廓的高级技巧,以帮助读者更好地理解和利用OpenCV中轮廓相关的函数。我们将重点介绍以下四个方面:
5.1 轮廓的分层
轮廓的分层是指在一个轮廓内可能存在内部轮廓,因此可以将这些轮廓进行层次结构的分类。使用OpenCV中的函数cv2.findContours()可以得到轮廓的层次结构信息,它返回一个包含所有轮廓及其层次关系的列表。其中,每个轮廓信息都由四个数值组成,表示轮廓在列表中的索引、顶层轮廓、下一层轮廓和子轮廓。如果某个轮廓没有子轮廓或者顶层轮廓,相应的数值将为-1。
以下是一个查找和绘制分层轮廓的代码示例:
import cv2
import numpy as np
img = cv2.imread('image.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
color = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
contour_img = cv2.drawContours(color, contours, -1, (0, 255, 0), 2)
cv2.imshow('Contours', contour_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
使用函数cv2.findContours()查找轮廓及其层次关系。其中cv2.RETR_TREE表示查找轮廓的层次信息,cv2.CHAIN_APPROX_SIMPLE表示仅存储轮廓的端点信息。最后使用函数cv2.drawContours()将得到的分层轮廓绘制出来,在屏幕上显示。
5.2 极值点
对于一个封闭的轮廓,极值点是指轮廓上的凸起点和凹陷点。OpenCV提供了cv2.convexHull()函数来计算轮廓的凸包,使用cv2.convexityDefects()函数计算轮廓的凸性缺陷,这些凸性缺陷就是轮廓上的凹陷点。
以下是一个计算并标出极值点的代码示例:
import cv2
import numpy as np
img = cv2.imread('image.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
color = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
hull = cv2.convexHull(contours[0], returnPoints=False)
defects = cv2.convexityDefects(contours[0], hull)
for i in range(defects.shape[0]):
start, end, far, _ = defects[i, 0]
start = tuple(contours[0][start][0])
end = tuple(contours[0][end][0])
far = tuple(contours[0][far][0])
cv2.line(color, start, end, (0, 255, 0), 2)
cv2.circle(color, far, 5, (0, 0, 255), -1)
cv2.imshow('Contour with defects', color)
cv2.waitKey(0)
cv2.destroyAllWindows()
首先查找轮廓及其层次结构,用cv2.cvtColor()函数将图像转为灰度,用cv2.threshold()函数进行二值化处理。然后计算轮廓的凸包和凸性缺陷,得到所有凸性缺陷的起点、终点和极端点坐标,最后使用cv2.line()函数画出缺陷的起点和终点,使用cv2.circle()函数画出凹陷点。
5.3 轮廓的拟合
在某些应用中,我们可能需要将轮廓的形状拟合成一个更加简单的形状。OpenCV提供了cv2.fitEllipse()(拟合椭圆)和cv2.approxPolyDP()(逼近多边形)两个函数来实现轮廓的拟合。
以下是一个利用拟合椭圆和逼近多边形的代码示例:
import cv2
import numpy as np
img = cv2.imread('image.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
color = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
ellipse = cv2.fitEllipse(contours[0])
approx = cv2.approxPolyDP(contours[0], 0.01 * cv2.arcLength(contours[0], True), True)
cv2.ellipse(color, ellipse, (0, 255, 0), 2)
cv2.drawContours(color, [approx], -1, (0, 0, 255), 2)
cv2.imshow('Fitted contour', color)
cv2.waitKey(0)
cv2.destroyAllWindows()
首先查找轮廓及其层次结构,用cv2.cvtColor()函数将图像转为灰度,用cv2.threshold()函数进行二值化处理。然后使用cv2.fitEllipse()来计算该轮廓的最小外接椭圆,使用cv2.approxPolyDP()来逼近多边形。最后分别用cv2.ellipse()和cv2.drawContours()函数将拟合的椭圆和多边形绘制在屏幕上。
5.4 轮廓的绘制
有时候需要绘制轮廓的边界线或者填充轮廓内部的区域,OpenCV提供了cv2.drawContours()和cv2.fillPoly()两个函数来分别绘制轮廓的边界线和填充轮廓内部区域。
以下是一个绘制轮廓边界线和填充轮廓内部区域的代码示例:
import cv2
import numpy as np
img = cv2.imread('image.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
color = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
cv2.drawContours(color, contours, -1, (0, 255, 0), 2)
mask = np.zeros(thresh.shape, np.uint8)
cv2.fillPoly(mask, contours, 255)
fill = cv2.bitwise_and(img, img, mask=mask)
cv2.imshow('Contours', color)
cv2.imshow('Filled contour', fill)
cv2.waitKey(0)
cv2.destroyAllWindows()
首先查找轮廓及其层次结构,用cv2.cvtColor()函数将图像转为灰度,用cv2.threshold()函数进行二值化处理。然后使用cv2.drawContours()将轮廓绘制在一个白色背景上,使用cv2.fillPoly()函数来将轮廓内部填充为白色,最后使用cv2.bitwise_and()函数和cv2.imshow()函数将得到的结果显示在屏幕上。
代码中的fill变量是利用按位与运算实现的结果,其中mask表示非零部分作为掩码,并且由于原图像是彩色的,因此按位与运算之后才能将轮廓内部区域填充为白色。
6. 实践案例
OpenCV是一个强大的计算机视觉库,提供了许多功能来处理图像和视频。其中一个重要的功能是轮廓检测,可以用于分离从复杂背景中区分的物体。在本实践案例中,将展示如何使用OpenCV轮廓检测来检测和分离单个物体,并用多边形绘制边缘。
6.1 检测和分离单个物体
首先,需要导入需要的模块和图片:
import cv2
import numpy as np
img = cv2.imread('image.jpg')
然后,需要将图像转换为灰度图像,并进行二值化:
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
在这里,将使用cv2.findContours()函数查找所有轮廓。该函数接受二值化图像和一些标志作为输入,并返回图像中的所有轮廓。这些轮廓存储在一个列表中。
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
接下来,需要选择要分离的轮廓。在这里,将仅选择第一个轮廓,并使用cv2.drawContours()函数将其绘制为蓝色:
cnt = contours[0]
cv2.drawContours(img, [cnt], 0, (255, 0, 0), 3)
最后,可以将图像和分离的物体保存起来:
cv2.imwrite('output.jpg', img)
cv2.imwrite('object.jpg', thresh)
以下是完整的代码:
import cv2
import numpy as np
img = cv2.imread('image.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
cnt = contours[0]
cv2.drawContours(img, [cnt], 0, (255, 0, 0), 3)
cv2.imwrite('output.jpg', img)
cv2.imwrite('object.jpg', thresh)
6.2 检测并绘制多边形
与上一节类似,首先需要导入需要的模块和图片,然后进行图像处理:
import cv2
import numpy as np
img = cv2.imread('image.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
然而,这一次需要使用逐步逼近多边形来近似轮廓,而非直接绘制轮廓:
for cnt in contours:
epsilon = 0.01 * cv2.arcLength(cnt, True)
approx = cv2.approxPolyDP(cnt, epsilon, True)
cv2.drawContours(img, [approx], 0, (0, 255, 0), 3)
在这里,使用cv2.approxPolyDP()函数来逐步逼近多边形,该函数接受精度参数,可用于控制逼近精度。较小的精度值将生成围绕轮廓的更紧密的多边形。每次逼近会返回一个逼近多边形的顶点数组。在这里,将绘制每个逼近多边形。
最后,可以将结果保存下来:
cv2.imwrite('output.jpg', img)
以下是完整的代码:
import cv2
import numpy as np
img = cv2.imread('image.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 150, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
for cnt in contours:
epsilon = 0.01 * cv2.arcLength(cnt, True)
approx = cv2.approxPolyDP(cnt, epsilon, True)
cv2.drawContours(img, [approx], 0, (0, 255, 0), 3)
cv2.imwrite('output.jpg', img)
以上就是使用OpenCV轮廓检测来检测和分离单个物体,并用多边形绘制边缘的实践案例。这些代码可以用作从图像中提取目标的基础,并在许多计算机视觉应用程序中使用。
7. 总结
7.1 轮廓检测的应用
OpenCV 中的轮廓检测在计算机视觉和图像处理领域有着广泛的应用。其中一些主要的应用包括:
-
目标检测与识别:轮廓检测可以用于在图像中识别和定位对象,从而实现目标检测和识别。通过寻找图像中的闭合轮廓,可以找到对象的外形信息,从而进行识别。
-
图像分割:轮廓检测可以帮助将图像分割为不同的区域或对象。这在医学图像分割、自动驾驶中的道路检测等领域有着重要的应用。
-
边缘检测:通过轮廓检测,可以实现图像中边缘信息的提取,有助于进行图像增强、特征提取等操作。
-
运动跟踪:利用轮廓检测可以实现目标在连续帧图像中的运动跟踪,这在视频监控、机器人视觉等领域都是至关重要的。
-
图像测量:通过轮廓检测,可以进行图像中对象的尺寸测量和形状分析,例如在工业自动化、产品质检等方面有着广泛的应用。
-
虚拟现实和增强现实:轮廓检测可用于实现虚拟现实和增强现实中的图像对象识别与交互,提供更丰富的用户体验。
7.2 Python 和 OpenCV 进行轮廓检测
要使用 Python 和 OpenCV 进行轮廓检测,首先需要导入 OpenCV 库,并加载待处理的图像。接下来,可以通过一系列图像处理和阈值化的操作,找到图像中的轮廓。具体步骤如下:
-
导入必要的库:首先需要导入所需的 Python 库,包括 OpenCV 和 NumPy 等。
-
读取图像:使用 OpenCV 读取待处理的图像文件。
-
图像预处理:对图像进行预处理操作,如灰度转换、高斯滤波等,以便更好地进行轮廓检测。
-
阈值化:通过设定阈值,将图像转换为二值图像,以便寻找图像中的轮廓。
-
寻找轮廓:利用 OpenCV 的轮廓查找函数寻找图像中的轮廓信息,获取每个轮廓的坐标点。
-
绘制轮廓:可以选择将找到的轮廓绘制在原始图像上,便于可视化和后续分析。
-
轮廓属性提取:可以计算轮廓的面积、周长等属性,用于进一步的分析和应用。
7.3 轮廓检测的关键步骤
轮廓检测的关键步骤包括:
-
图像预处理:包括灰度化、滤波、二值化等操作,以便更好地提取图像中的轮廓信息。
-
轮廓查找:利用 OpenCV 提供的函数在预处理后的图像中寻找轮廓,得到轮廓的坐标信息。
-
轮廓特征提取:获取每个轮廓的特征,如面积、周长、重心等,用于分析和识别。
-
轮廓绘制:可选操作,将找到的轮廓绘制在原始图像上,以便进行可视化展示。
通过上述关键步骤,可以有效地进行图像中的轮廓检测,并在计算机视觉和图像处理应用中得到广泛的应用。
以上是对 OpenCV 轮廓检测的总结,希望对你有所帮助。