图像缩放算法
1.最近邻插值图像缩放算法详解
最近邻插值(Nearest Neighbor Interpolation)是一种简单且直观的图像缩放算法。它通过选择离目标像素最近的原始像素的颜色值来确定目标像素的颜色值。尽管这种方法计算速度快,但由于未考虑周围像素的颜色信息,图像在放大时可能会出现明显的锯齿效应。
算法步骤
- 计算缩放比例:确定新图像和原始图像的宽高比例。
- 遍历新图像像素:逐个计算新图像中每个像素的位置。
- 确定最近邻像素:对于新图像中的每个像素,找到对应的原始图像中的最近邻像素。
- 赋值:将原始图像中最近邻像素的颜色值赋给新图像中的像素。
Python 实现
以下是最近邻插值图像缩放算法的Python实现代码:
import numpy as np
from PIL import Image
def nearest_neighbor_interpolation(image, new_width, new_height):
original_width, original_height = image.size # 获取原始图像的宽度和高度
new_image = Image.new("RGB", (new_width, new_height)) # 创建一个新的图像对象
pixel_map = new_image.load() # 获取新图像的像素映射
# 遍历新图像的每个像素
for i in range(new_width):
for j in range(new_height):
# 计算在原始图像中对应的像素位置
x = int(i * original_width / new_width)
y = int(j * original_height / new_height)
# 获取原始图像中对应像素的颜色值,并赋值给新图像的当前像素
pixel_map[i, j] = image.getpixel((x, y))
return new_image
# 示例用法
if __name__ == "__main__":
image = Image.open('example.jpg') # 打开原始图像
new_width, new_height = 800, 600 # 定义新图像的宽度和高度
new_image = nearest_neighbor_interpolation(image, new_width, new_height) # 调用最近邻插值函数
new_image.show() # 显示新图像
new_image.save('resized_example.jpg') # 保存新图像
详细解释
-
读取图像和创建新图像:
image = Image.open('example.jpg') new_image = Image.new("RGB", (new_width, new_height)) -
遍历新图像的每个像素:
for i in range(new_width): for j in range(new_height): -
计算对应的原始图像像素位置:
x = int(i * original_width / new_width) y = int(j * original_height / new_height) -
获取原始图像像素的颜色并赋值给新图像:
pixel_map[i, j] = image.getpixel((x, y))
优缺点
优点:
- 简单快速:算法简单,计算速度快,适合实时处理。
- 实现容易:代码简单易懂,适合入门学习图像处理。
缺点:
- 锯齿效应:在图像放大时容易出现锯齿效应,图像质量不高。
- 细节丢失:在图像缩小时可能会丢失一些细节。
尽管最近邻插值在某些应用场景中足够使用,但在需要更高质量图像的场景中,通常会选择更加复杂的插值方法,如双线性插值或双三次插值。
2.双线性插值图像缩放算法详解
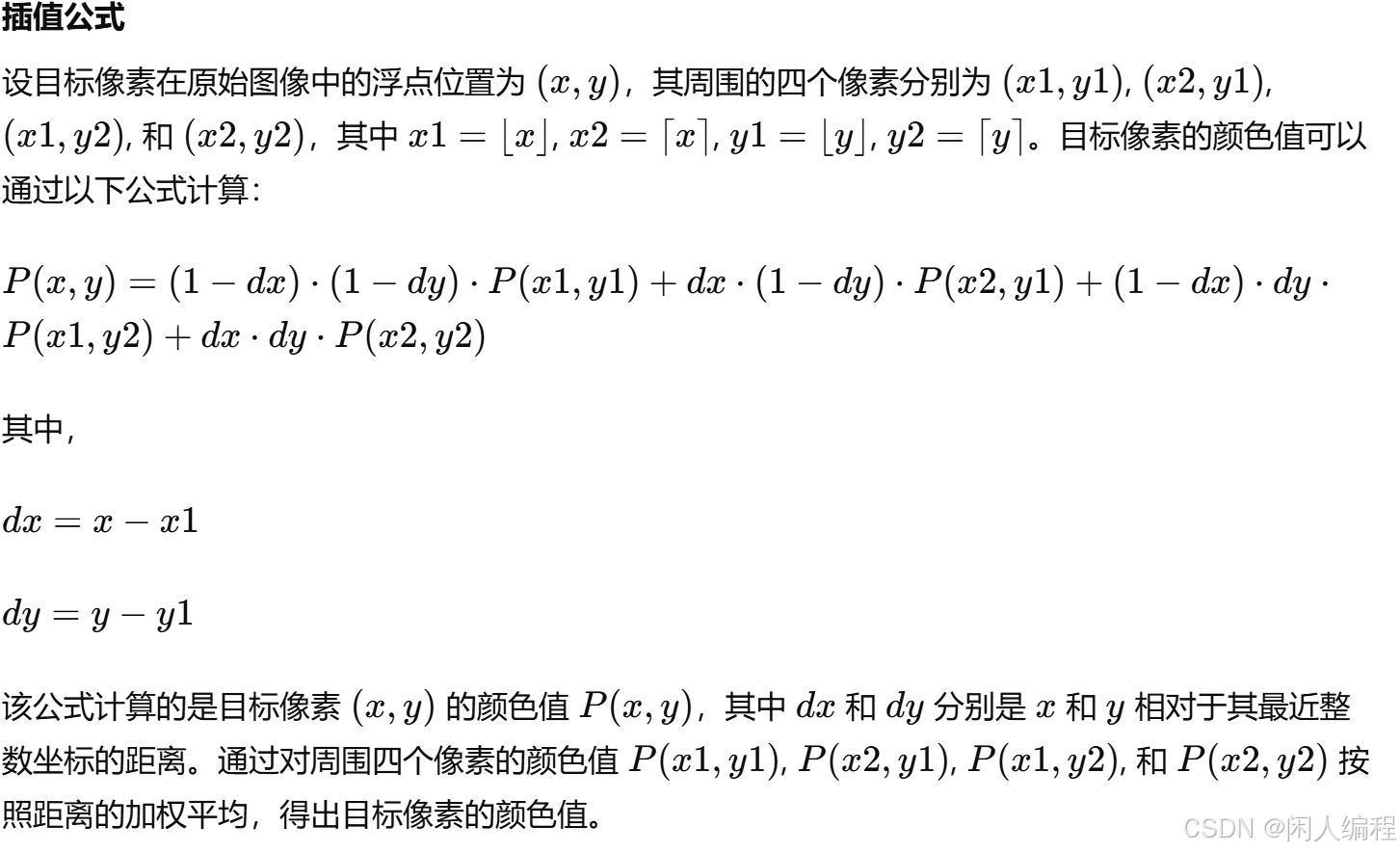
双线性插值(Bilinear Interpolation)是一种常用的图像缩放算法。它通过考虑目标像素周围四个像素的颜色值,使用双线性插值公式计算出目标像素的颜色值。相较于最近邻插值,双线性插值能生成更平滑的图像效果。
算法步骤
- 计算缩放比例:确定新图像和原始图像的宽高比例。
- 遍历新图像像素:逐个计算新图像中每个像素的位置。
- 确定邻近像素:找到目标像素在原始图像中的对应位置,确定其周围的四个像素。
- 双线性插值计算:使用双线性插值公式计算目标像素的颜色值。
Python 实现
以下是双线性插值图像缩放算法的Python实现代码:
import numpy as np
from PIL import Image
def bilinear_interpolation(image, new_width, new_height):
original_width, original_height = image.size # 获取原始图像的宽度和高度
new_image = Image.new("RGB", (new_width, new_height)) # 创建一个新的图像对象
pixel_map = new_image.load() # 获取新图像的像素映射
for i in range(new_width):
for j in range(new_height):
# 计算在原始图像中对应的浮点像素位置
x = i * (original_width - 1) / new_width
y = j * (original_height - 1) / new_height
# 计算相邻四个像素的位置
x1 = int(x)
x2 = min(x1 + 1, original_width - 1)
y1 = int(y)
y2 = min(y1 + 1, original_height - 1)
# 计算插值权重
dx = x - x1
dy = y - y1
# 获取相邻四个像素的颜色值
p1 = np.array(image.getpixel((x1, y1)))
p2 = np.array(image.getpixel((x2, y1)))
p3 = np.array(image.getpixel((x1, y2)))
p4 = np.array(image.getpixel((x2, y2)))
# 计算目标像素的颜色值
pixel_value = (1 - dx) * (1 - dy) * p1 + dx * (1 - dy) * p2 + (1 - dx) * dy * p3 + dx * dy * p4
pixel_map[i, j] = tuple(pixel_value.astype(int))
return new_image
# 示例用法
if __name__ == "__main__":
image = Image.open('example.jpg') # 打开原始图像
new_width, new_height = 800, 600 # 定义新图像的宽度和高度
new_image = bilinear_interpolation(image, new_width, new_height) # 调用双线性插值函数
new_image.show() # 显示新图像
new_image.save('resized_example.jpg') # 保存新图像
详细解释
-
读取图像和创建新图像:
image = Image.open('example.jpg') new_image = Image.new("RGB", (new_width, new_height)) -
遍历新图像的每个像素:
for i in range(new_width): for j in range(new_height): -
计算对应的原始图像浮点位置:
x = i * (original_width - 1) / new_width y = j * (original_height - 1) / new_height -
确定相邻四个像素的位置:
x1 = int(x) x2 = min(x1 + 1, original_width - 1) y1 = int(y) y2 = min(y1 + 1, original_height - 1) -
计算插值权重:
dx = x - x1 dy = y - y1 -
获取相邻四个像素的颜色值:
p1 = np.array(image.getpixel((x1, y1))) p2 = np.array(image.getpixel((x2, y1))) p3 = np.array(image.getpixel((x1, y2))) p4 = np.array(image.getpixel((x2, y2))) -
计算目标像素的颜色值:
pixel_value = (1 - dx) * (1 - dy) * p1 + dx * (1 - dy) * p2 + (1 - dx) * dy * p3 + dx * dy * p4 pixel_map[i, j] = tuple(pixel_value.astype(int))
优缺点
优点:
- 平滑效果好:生成的图像更加平滑,减少了锯齿效应。
- 适用广泛:在各种图像处理应用中广泛使用,平衡了计算复杂度和图像质量。
缺点:
- 计算复杂度较高:相比最近邻插值,计算量更大,处理速度较慢。
- 细节保留一般:在某些情况下,细节保留效果不如双三次插值。
双线性插值是图像缩放中常用的方法之一,适合需要平滑效果但计算资源有限的应用场景。
3.双三次插值图像缩放算法详解
双三次插值(Bicubic Interpolation)是一种高级的图像缩放算法。它通过考虑目标像素周围16个像素的颜色值,使用双三次插值公式计算出目标像素的颜色值。相较于双线性插值,双三次插值能生成更平滑、更细腻的图像效果。
算法步骤
- 计算缩放比例:确定新图像和原始图像的宽高比例。
- 遍历新图像像素:逐个计算新图像中每个像素的位置。
- 确定邻近像素:找到目标像素在原始图像中的对应位置,确定其周围的16个像素。
- 双三次插值计算:使用双三次插值公式计算目标像素的颜色值。
Python 实现
以下是双三次插值图像缩放算法的Python实现代码:
import numpy as np
from PIL import Image
def cubic_weight(t, a=-0.5):
"""计算三次插值核函数的权重"""
t = np.abs(t)
if t <= 1:
return (a + 2) * t**3 - (a + 3) * t**2 + 1
elif t <= 2:
return a * t**3 - 5 * a * t**2 + 8 * a * t - 4 * a
else:
return 0
def bicubic_interpolation(image, new_width, new_height):
original_width, original_height = image.size
new_image = Image.new("RGB", (new_width, new_height))
pixel_map = new_image.load()
image_array = np.array(image)
for i in range(new_width):
for j in range(new_height):
# 计算在原始图像中对应的浮点像素位置
x = i * (original_width - 1) / new_width
y = j * (original_height - 1) / new_height
x1 = int(np.floor(x))
y1 = int(np.floor(y))
# 初始化颜色值
r, g, b = 0, 0, 0
# 双三次插值计算
for m in range(-1, 3):
for n in range(-1, 3):
xm = min(max(x1 + m, 0), original_width - 1)
yn = min(max(y1 + n, 0), original_height - 1)
weight = cubic_weight(x - xm) * cubic_weight(y - yn)
pixel = image_array[yn, xm]
r += pixel[0] * weight
g += pixel[1] * weight
b += pixel[2] * weight
# 赋值给新图像的像素
pixel_map[i, j] = (int(r), int(g), int(b))
return new_image
# 示例用法
if __name__ == "__main__":
image = Image.open('example.jpg') # 打开原始图像
new_width, new_height = 800, 600 # 定义新图像的宽度和高度
new_image = bicubic_interpolation(image, new_width, new_height) # 调用双三次插值函数
new_image.show() # 显示新图像
new_image.save('resized_example.jpg') # 保存新图像
详细解释
-
三次插值核函数:
def cubic_weight(t, a=-0.5): """计算三次插值核函数的权重""" t = np.abs(t) if t <= 1: return (a + 2) * t**3 - (a + 3) * t**2 + 1 elif t <= 2: return a * t**3 - 5 * a * t**2 + 8 * a * t - 4 * a else: return 0 -
读取图像和创建新图像:
image = Image.open('example.jpg') new_image = Image.new("RGB", (new_width, new_height)) -
遍历新图像的每个像素:
for i in range(new_width): for j in range(new_height): -
计算对应的原始图像浮点位置:
x = i * (original_width - 1) / new_width y = j * (original_height - 1) / new_height x1 = int(np.floor(x)) y1 = int(np.floor(y)) -
双三次插值计算:
# 初始化颜色值 r, g, b = 0, 0, 0 # 双三次插值计算 for m in range(-1, 3): for n in range(-1, 3): xm = min(max(x1 + m, 0), original_width - 1) yn = min(max(y1 + n, 0), original_height - 1) weight = cubic_weight(x - xm) * cubic_weight(y - yn) pixel = image_array[yn, xm] r += pixel[0] * weight g += pixel[1] * weight b += pixel[2] * weight -
赋值给新图像的像素:
pixel_map[i, j] = (int(r), int(g), int(b))
优缺点
优点:
- 高质量:生成的图像更加平滑,细节更丰富。
- 适用广泛:在需要高质量图像处理的应用中广泛使用。
缺点:
- 计算复杂度高:相比双线性插值,计算量更大,处理速度较慢。
- 实现复杂:代码复杂度高,不适合实时处理。

双三次插值是图像缩放中高质量的方法之一,适合需要高质量图像处理的应用场景。