自动驾驶实战系列(一)——构建点云地图的关键技术 | 攻城狮の家作为系列的第一篇,主要讲解室外构建点云地图的常用方法,以及基本原理和实现。主要是一个基于NDT的激光里程计,然后配合IMU/Odom/Gps等传感器提供的初值,完成地图构建,这部分仅供学习,最后给出一个实用性较强的开源激光SLAM供直接使用。 http://xchu.net/2019/10/11/31ndt-map/
http://xchu.net/2019/10/11/31ndt-map/
1. 参数
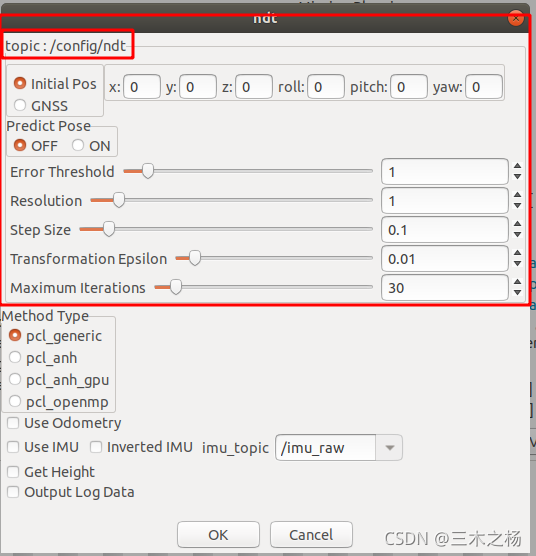
ndt.setTransformationEpsilon(trans_eps); // 两次变换之间允许的最大值,用于判断是否收敛,作为迭代计算完成的阈值; =0.01
ndt.setStepSize(step_size); //牛顿法优化的最大步长 0.1
ndt.setResolution(ndt_res); //ndt cell的分辨率,我设定的是2.0,一般0.1-1,太大导致精度下降,太小导致内存撑爆
ndt.setMaximumIterations(max_iter); //ndt的最大迭代次数 这里我设置的是30
ndt.setInputSource(filtered_scan_ptr); // 输入source点云