内容来自马昌凤编著的《最优化方法及其Matlab程序设计》,文章仅为个人的学习笔记,感兴趣的朋友详见原书。
罚函数法的基本思想:根据约束条件的特点,将其转化为某种惩罚函数加到目标函数中去,从而将约束优化问题转化为一系列的无约束优化问题来求解。
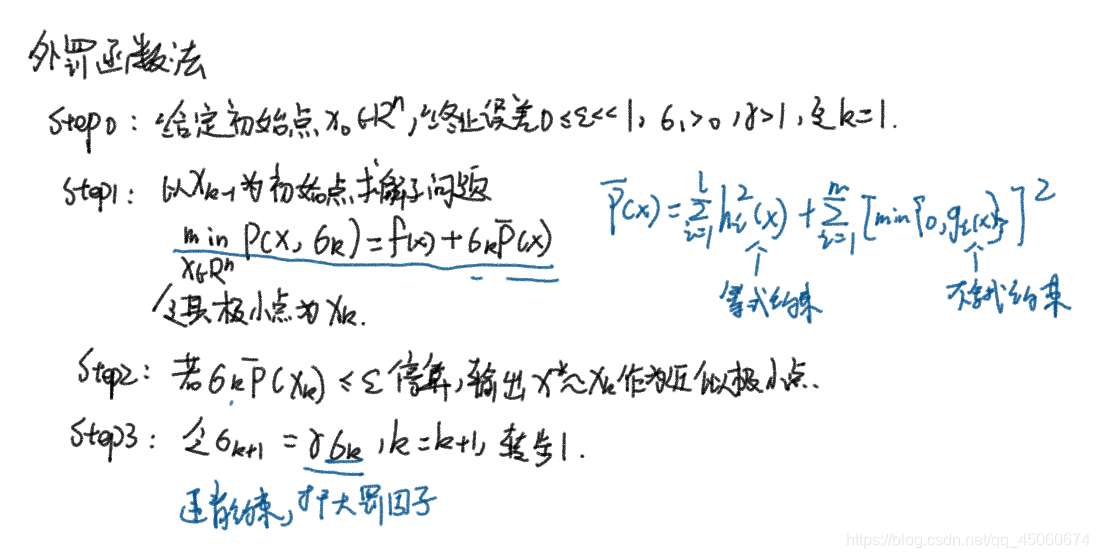
1.外罚函数法
算法
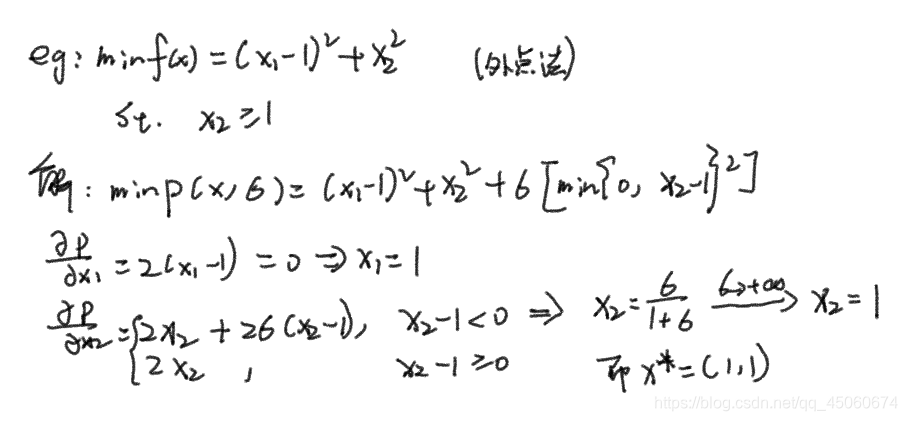
示例
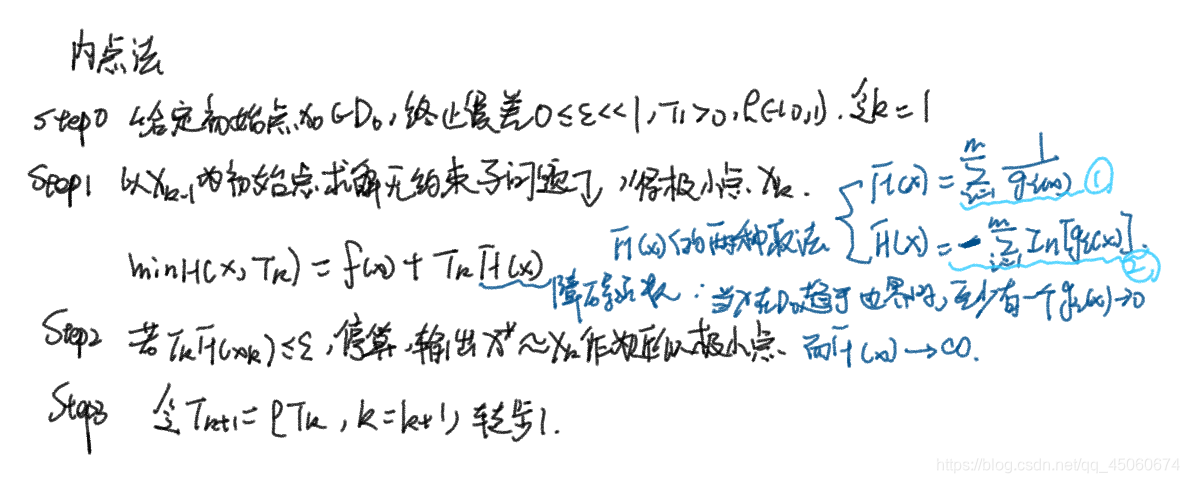
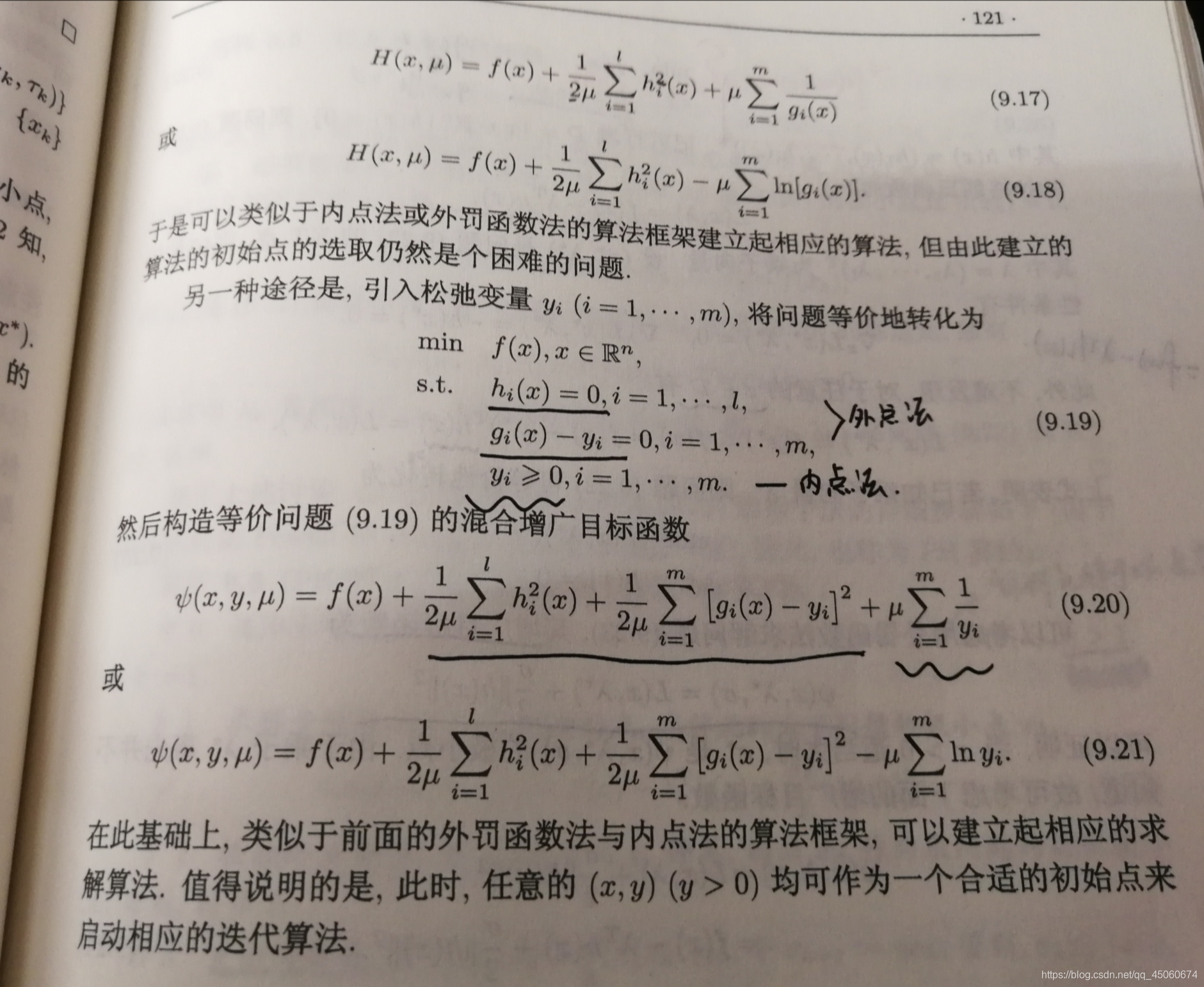
2.内点法
内点法仅适用于不等式约束的优化问题
m
i
n
f
(
x
)
,
x
∈
R
n
min f(x), x∈R^n
minf(x),x∈Rn
s
.
t
.
g
i
(
x
)
≥
0
,
i
=
1
,
.
.
.
,
m
s.t. g_i(x)≥0, i=1,...,m
s.t.gi(x)≥0,i=1,...,m
基本思想:保持每一个迭代点 x k x_k xk都是可行域 D D D的内点,可行域的边界被筑起一道很高的“围墙”作为障碍,当迭代点靠近边界时,增广目标函数值骤然增大,以示“惩罚”,并阻止迭代点穿越边界。
算法
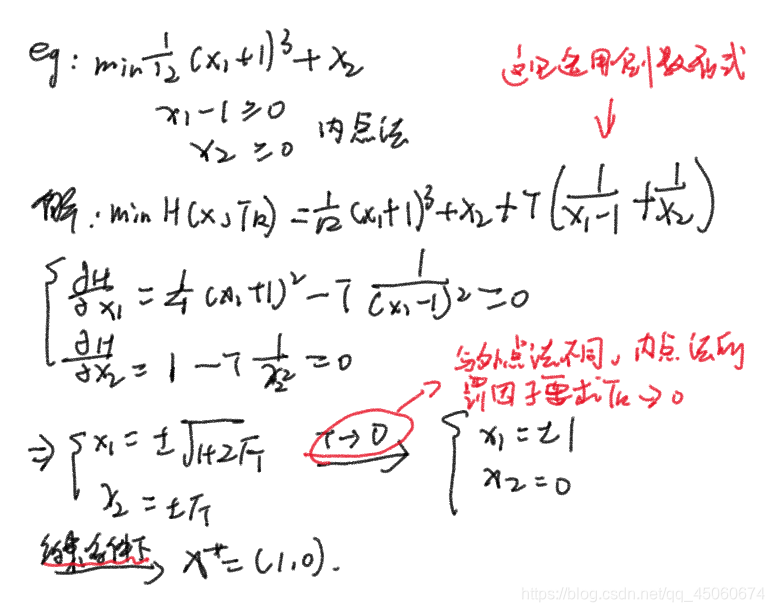
示例
故对一般约束问题的内点法,等式约束利用“外罚函数”的思想,而不等式约束则利用“障碍函数”的思想构造出混合增广目标函数。
3.乘子法
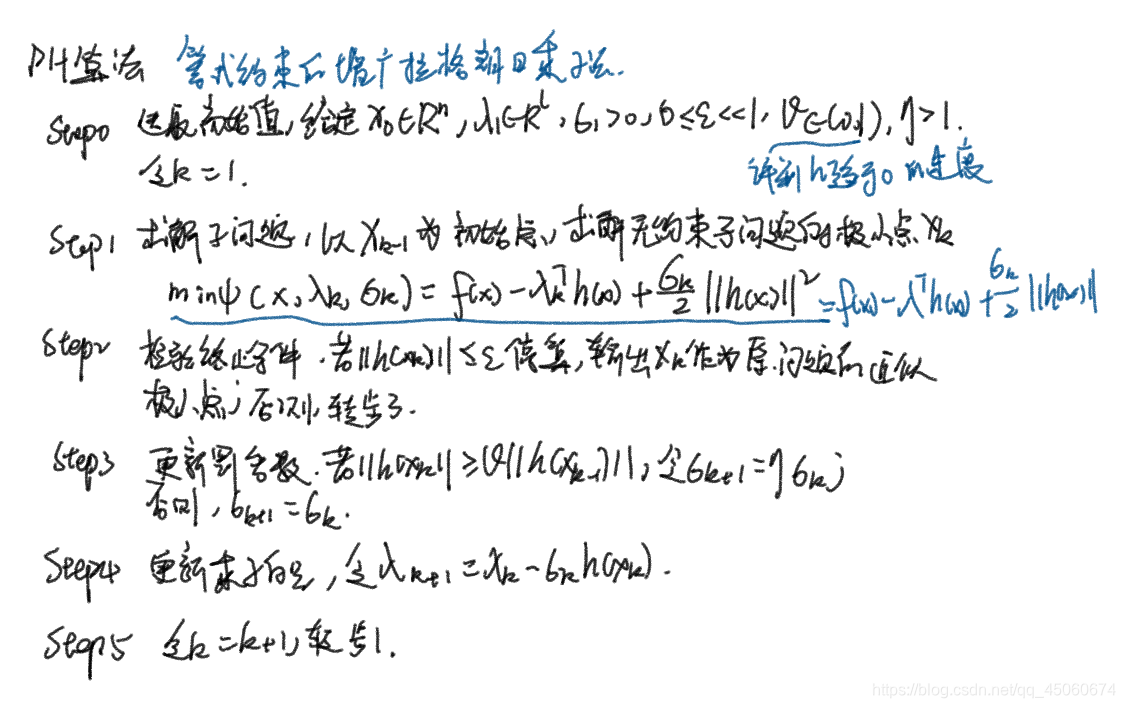
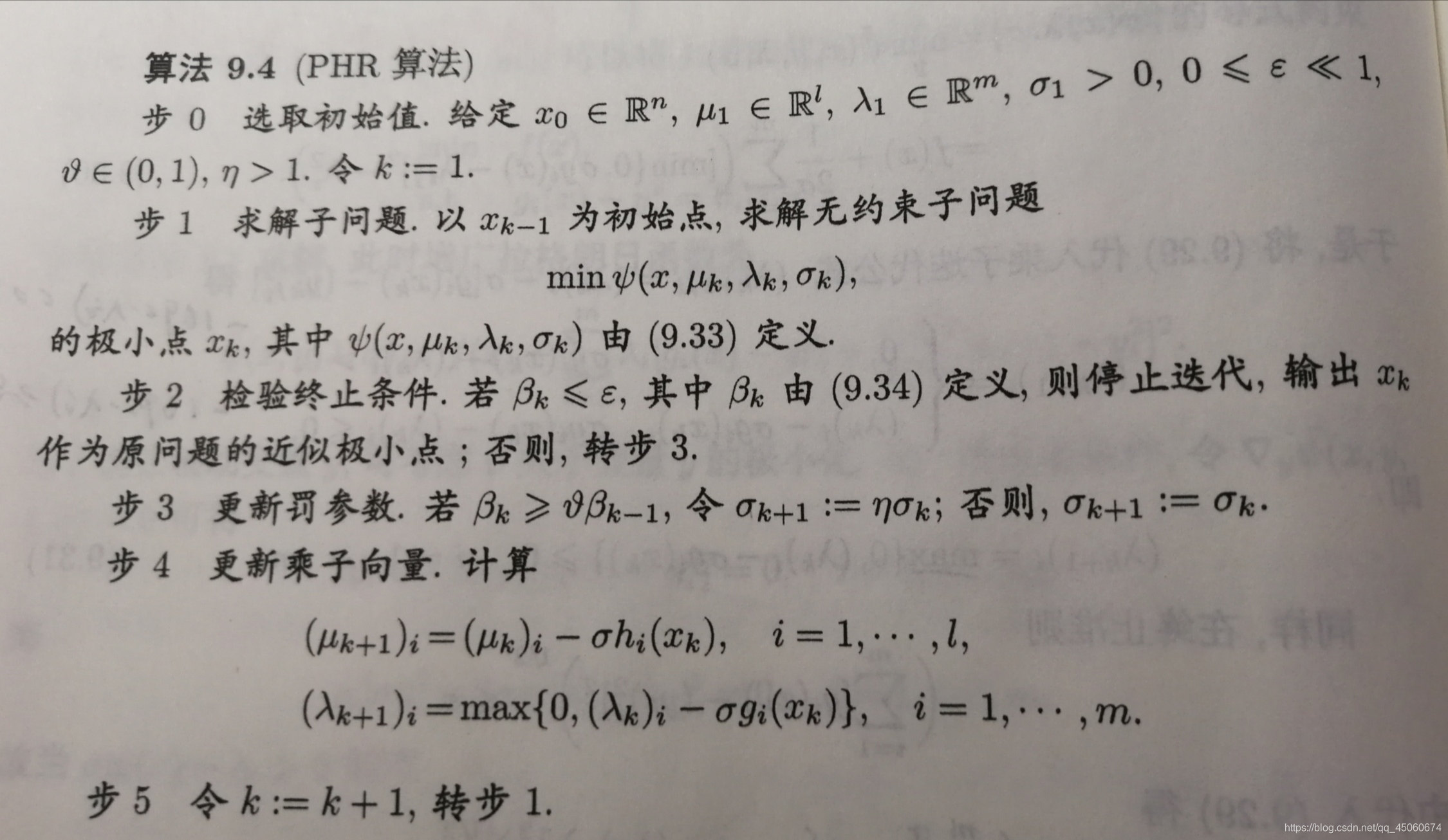
基本思想:从原问题的拉格朗日函数出发,再加上适当的罚函数,从而将原问题转化为求解一系列的无约束优化子问题
等式约束问题的乘子法
不等式约束问题的乘子法
为等式约束的推广,即先引进辅助变量把不等式约束化为等式约束,再利用最优性条件消去辅助变量。

程序
增广拉格朗日函数
function psi=mpsi(x,fun,hf,gf,dfun,dhf,dgf,mu,lambda,sigma)
f=feval(fun,x); he=feval(hf,x); gi=feval(gf,x);
l=length(he); m=length(gi);
psi=f; s1=0.0;
for(i=1:l)
psi=psi-he(i)*mu(i);
s1=s1+he(i)^2;
end
psi=psi+0.5*sigma*s1;
s2=0.0;
for(i=1:m)
s3=max(0.0, lambda(i) - sigma*gi(i));
s2=s2+s3^2-lambda(i)^2;
end
psi=psi+s2/(2.0*sigma);
增广拉格朗日函数的梯度
function dpsi=dmpsi(x,fun,hf,gf,dfun,dhf,dgf,mu,lambda,sigma)
dpsi=feval(dfun,x);
he=feval(hf,x); gi=feval(gf,x);
dhe=feval(dhf,x); dgi=feval(dgf,x);
l=length(he); m=length(gi);
for(i=1:l)
dpsi=dpsi+(sigma*he(i)-mu(i))*dhe(:,i);
end
for(i=1:m)
dpsi=dpsi+(sigma*gi(i)-lambda(i))*dgi(:,i);
end
乘子法程序
function [x,mu,lambda,output]=multphr(fun,hf,gf,dfun,dhf,dgf,x0)
% 功能: 用乘子法解一般约束问题: min f(x), s.t. h(x)=0, g(x)>=0
%输入: x0是初始点, fun, dfun分别是目标函数及其梯度;
% hf, dhf分别是等式约束(向量)函数及其Jacobi矩阵的转置;
% gf, dgf分别是不等式约束(向量)函数及其Jacobi矩阵的转置;
%输出: x是近似最优点,mu, lambda分别是相应于等式约束和不
% 等式约束的乘子向量;output是结构变量,输出近似极小值f, 迭
% 代次数
maxk=500; %最大迭代次数
sigma=2.0; %罚因子
eta=2.0; theta=0.8; %PHR算法中的实参数
k=0; ink=0; %k, ink分别是外迭代和内迭代次数
epsilon=1e-5; %终止误差值
x=x0; he=feval(hf,x); gi=feval(gf,x);
n=length(x); l=length(he); m=length(gi);
%选取乘子向量的初始值
mu=0.1*ones(l,1); lambda=0.1*ones(m,1);
btak=10; btaold=10; %用来检验终止条件的两个值
while(btak>epsilon & k<maxk)
%调用BFGS算法程序求解无约束子问题
[x,ival,ik]=bfgs('mpsi','dmpsi',x0,fun,hf,gf,dfun,dhf,dgf,mu,lambda,sigma);
ink=ink+ik;
he=feval(hf,x); gi=feval(gf,x);
btak=0.0;
for (i=1:l), btak=btak+he(i)^2; end
for i=1:m
temp=min(gi(i),lambda(i)/sigma);
btak=btak+temp^2;
end
btak=sqrt(btak);
if btak>epsilon
if(k>=2 & btak > theta*btaold)
sigma=eta*sigma;
end
%更新乘子向量
for (i=1:l), mu(i)=mu(i)-sigma*he(i); end
for (i=1:m)
lambda(i)=max(0.0,lambda(i)-sigma*gi(i));
end
end
k=k+1;
btaold=btak;
x0=x;
end
f=feval(fun,x);
output.fval=f;
output.iter=k;
output.inner_iter=ink;
output.bta=btak;
%xstar=[0.5*(sqrt(7)-1);0.25*(sqrt(7)+1)];
%err1=norm(x-xstar)