前言
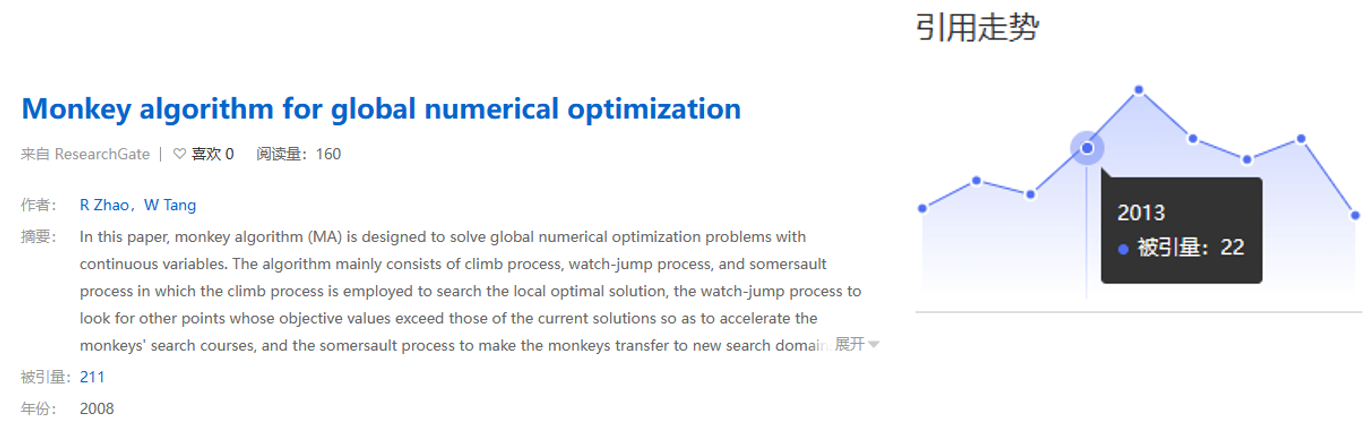
- 猴群 (Monkey Algorithm,MA)算法。由 Ruiqing 和 Wansheng 等于 2008 年提出。
- 主要模仿了猴群爬山过程的行为。
截止到 2023 年,算法引用趋势
1. 猴群相关的生物群行为
猴群爬山的行为模式
- 攀爬过程:猴子通过攀爬达到一个山顶
- 瞭望过程:如果爬到山顶则向四周瞭望以寻找更高的山峰
- 跳跃过程:找到了更高的山峰则跳跃过去继续攀登
- 空翻过程:为了发现更高的山峰猴子需要空翻到更远的地方
2. 算法仿生设计
2.1 概述
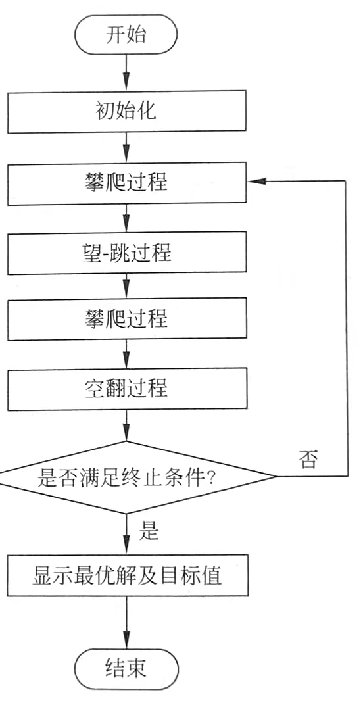
根据猴群的爬山行为表现,MA 的过程也分为三种过程:攀爬过程,望-跳过程和空翻过程。
- 首先将猴群的位置进行初始化。
- 攀爬:每只猴子都找到一个山顶。
- 望-跳:猴子瞭望四周,寻找是否有比当前更高的点,有则跳过去。
- 空翻:猴子望一个支点的方向进行空翻,以到达新的搜索区域。
- 对上述每个步骤进行迭代,并且对整个过程进行迭代。
2.2 攀爬过程
1.猴子个体 i i i 首先探查依据伪梯度方向从点 X i = ( X i , 1 , X i , 2 , X i , 3 , … , X i , d ) X_i = ( X_i,1,X_i,2,X_i,3,…,X_i,d) Xi=(Xi,1,Xi,2,Xi,3,…,Xi,d) 前进一步到达的位置 P i P_i Pi
-
随机产生序列向量 Δ X i : \Delta X_i: ΔXi:
Δ X i = ( Δ X i , 1 , Δ X i , 2 , . . . , Δ X i , D i ) \Delta X_i=(\Delta X_{i,1}, \Delta X_{i,2},..., \Delta X_{i,Di}) ΔXi=(ΔXi,1,ΔXi,2,...,ΔXi,Di) -
计算伪梯度:
f i , d ( X i , d ) = ( f ( X i , d + Δ X i , d ) − ( f ( X i , d − Δ X i , d ) 2 Δ X i , d f_{i, d}(X_{i, d}) = \frac{(f(X_{i,d} + \Delta X_{i,d}) - (f(X_{i,d} - \Delta X_{i,d})}{2\Delta X_{i,d}} fi,d(Xi,d)=2ΔXi,d(f(Xi,d+ΔXi,d)−(f(Xi,d−ΔXi,d) -
更新位置信息:
P ′ i , d = X ′ i , d + a ∗ s i g n ( f i , d ( X i , d ) ) P{'}_{i,d} = X{'}_{i,d} + a * sign(f_{i, d}(X_{i, d})) P′i,d=X′i,d+a∗sign(fi,d(Xi,d))
2.若 P i P_i Pi 超出 X X X 的取值范围: [ X l d , X u d ] [X_ld ,X_ud] [Xld,Xud],则 P i P_i Pi 取边界值。
3.计算该猴子个体在 P i P_i Pi 位置上的目标函数值 F ( P i ) F(P_i ) F(Pi) 。若 F ( P i ) < F ( X i ) F(P_i )< F(X_i ) F(Pi)<F(Xi) ,则 X i X_i Xi 替换为 P i P_i Pi ,否则不变。
4.重复执行这些操作步骤,直到达到最大攀爬次数 T m a x T_{max} Tmax 或者目标函数值没有什么变化。

2.3 望-跳过程
- 猴子个体
i
i
i 从当前所在位置点
X
i
=
(
X
i
,
1
,
X
i
,
2
,
X
i
,
3
,
…
,
X
i
,
d
)
X_i = ( X_i,1,X_i,2,X_i,3,…,X_i,d)
Xi=(Xi,1,Xi,2,Xi,3,…,Xi,d) 向四周望去,视线的落脚点位置为
P
i
P_i
Pi ,其中,
P
i
,
d
P_{i,d}
Pi,d 的值为:
P i , d = r a n d ( 0 , 1 ) ∗ ( X i , d − φ X i , d + φ ) P_{i,d} = rand(0,1)∗(X_{i,d} − φX_{i,d} + φ) Pi,d=rand(0,1)∗(Xi,d−φXi,d+φ)
其中 φ φ φ 为视野宽度,即猴子从所在点出发向外能观望的最远的距离。 - 若 P i P_i Pi 超出 X X X 的取值范围: [ X l d , X u d ] [X_{ld} ,X_{ud}] [Xld,Xud],则 P i P_i Pi 取边界值。
- 若 P i ∈ [ X l d , X u d ] P_i∈[X_{ld} ,X_{ud}] Pi∈[Xld,Xud],计算目标函数值 F ( P i ) F(P_i ) F(Pi) 。若 F ( P i ) < F ( X i ) F(P_i )< F(X_i ) F(Pi)<F(Xi) ,则猴子 跳至点 P i P_i Pi ,更新位置信息。
- 否则不跳, 重复望跳行为

- 猴子个体以空翻半径
μ
μ
μ 的长度进行空翻行为,其中
μ
μ
μ 在空翻区域
[
b
,
c
]
[b,c]
[b,c] 内取任意值:
μ = r a n d ( 0 , 1 ) ∗ [ b , c ] μ = rand(0,1)∗[b,c] μ=rand(0,1)∗[b,c] - 空翻的支点为群体的重心
X
=
(
X
1
,
X
2
,
…
,
X
D
i
)
X=(X_1,X_2 ,…,X_{Di} )
X=(X1,X2,…,XDi) , 则 空 翻 后 得 到 的 位 置 点 为
P
i
P_i
Pi ,其中
P i , d = X i , d + μ ∗ ( X i , d – X i , d ) P_{i,d} = X_{i,d} + μ∗(X_{i,d} – X_{i,d}) Pi,d=Xi,d+μ∗(Xi,d–Xi,d) - 若 P i P_i Pi 超出 X X X 的取值范围: [ X l d , X u d ] [X_{ld} ,X_{ud}] [Xld,Xud] ,则 P i P_i Pi 取边界值。
- 若空翻落点 P i ∈ [ X l d , X u d ] P_i ∈[X_{ld} ,X_{ud}] Pi∈[Xld,Xud] ,计算目标函数值 F ( P i ) F(P_i ) F(Pi) 。
- 若 F ( P i ) < F ( X i ) F(P_i)< F(X_i) F(Pi)<F(Xi) , 则空翻成功,更新位置信息。否则,不空翻,继续上述操作。

3. 算法流程
- 猴群位置
X
i
X_i
Xi 初始化。设置种群中个体总数
S
N
SN
SN,变量数目
D
i
D_i
Di,攀爬步长
a
a
a ,视野宽度
φ
φ
φ ,空翻区域
[
b
,
c
]
[b,c]
[b,c],最大攀爬次数
T
m
a
x
T_{max}
Tmax 以及最大迭代数
K
m
a
x
K_{max}
Kmax 。 位置点
X
i
=
(
X
i
,
1
,
X
i
,
2
,
X
i
,
3
,
…
,
X
i
,
d
)
X_i = ( X_{i,1},X_{i,2},X_{i,3},…,X_{i,d})
Xi=(Xi,1,Xi,2,Xi,3,…,Xi,d) 的初始化公式为:
X i , d = r a n d ( 0 , 1 ) ∗ ( X u , d − X i , d ) + X i , d X_{i,d} = rand(0,1)∗(X_{u,d} − X_{i,d})+ X_{i,d} Xi,d=rand(0,1)∗(Xu,d−Xi,d)+Xi,d - 第 i i i 只猴子个体从当前位置出发,执行攀爬行为,更新位置信息。
- 执行望跳行为,更新位置信息。
- 执行空翻行为,更新位置信息。
- 判断是否满足结束条件(到达求解精度)或者是否到达最大迭代次数 K m a x K_{max} Kmax 。若满足,则终止算法。否则,返回 2。
- 输出全局最优解及它相应的位置信息。
4. 算法特点
- MA 能够有效地求解高维的、非线性不可微的函数优化问题。
- 调控参数少,结构简单易操作,CPU消耗低等特点。
- 算法本身的“空翻”特点,使得它在算法收敛后期易跳出局部最优。
- 观跳行为和空翻行为存在很多的随机性,这中间的过程可能会耗费较多的时间
- 虽然猴群算法特有的空翻行为能帮助它很好地跳出局部最优值,但是空翻行为也存在极大的随机性,导致求解精度不佳。
5. 算法相关改进
-
解决离散变量组合问题时可能存在失效的问题,将猴群个体的位置信息运用整数编码方法,改进了算法的初始化方式
-
在攀爬行为中引进了“好动算法”,通过细微随机地调整猴子位置信息中的若干变量,进行精细的目标搜寻
-
对攀爬行为中依靠伪梯度计算前进的缺陷,重新定义攀爬行为
-
在算法后期观望行为中运用循环次数递增机制,提高了算法的求解效率
-
在猴群算法的攀爬、 观跳行为中引入混沌特征
-
将病毒算法和猴群算法相融合
-
将病毒算法和鱼群算法较强的局部寻优能力结合
-
对于算法本身的思想、原理、参数设置以及种群多样性的研究,仍停留在实验探索阶段,并未有更深入的分析与讨论。关于算法收敛性的分析与证明的研究还未出现。对猴群算法的改进技术主要集中于增加参数、与其它算法混合等方面,对于算法框架、迭代进化方式等的改进的研究较少。
Reference
Zhao, Ruiqing & Tang, Wansheng. (2008). Monkey algorithm for global numerical optimization. Journal of Uncertain Systems. 2. 165-176.