目录
2.1 /camera 坐标系 相对于 / base_link坐标系 :xyz偏移量(0.3 0.0 0.5),偏移角度均为0
2.2/camera 坐标系 相对于 /base_link的坐标系zyx轴的角度偏移
2.2.1camera坐标系 绕base_link坐标系的z轴旋转90°(逆时针旋转为正)
2.2.2 /camera坐标系 绕 /base_link坐标系的y轴旋转90°
2.2.3 /camera坐标系 绕 /base_link坐标系的x轴旋转90°
1.右手定则
右手定则:例如绕z轴转30°,即绕z轴逆时针转30°。
右手拇指与z轴正方向同向,右手卷住方向(四指弯曲方向)是正方向。
x,y轴同理。
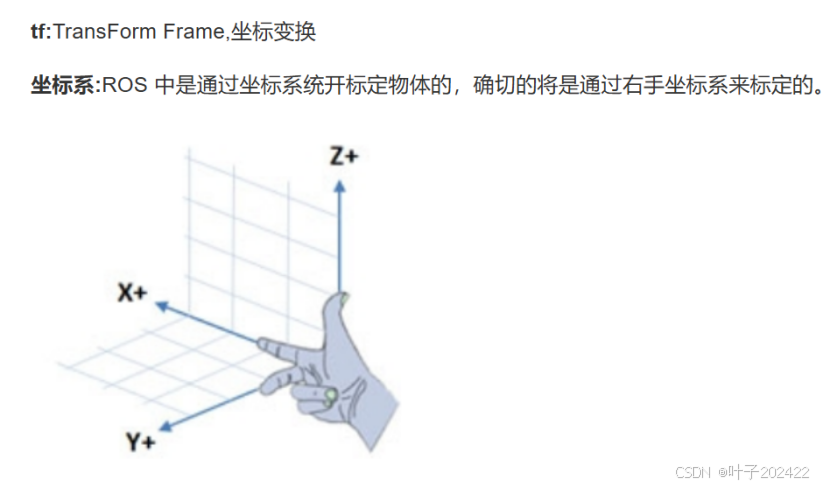
图1
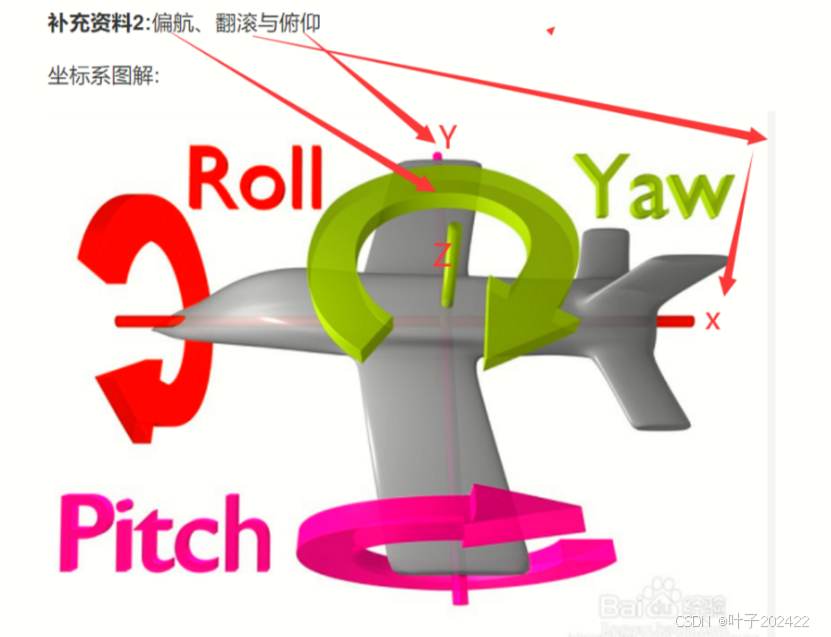
图2
2.rosrun tf2_ros static_transform_publisher x偏移量 y偏移量 z偏移量 z偏航角度 y俯仰角度 x翻滚角度(弧度制) 父级坐标系 子级坐标系(见书5.1.2)
R