1.softmax定义
把输入映射为0-1之间的实数,并且归一化保证和为1。max非黑即白,soft,输出是每个分类被取到的概率。
定义:
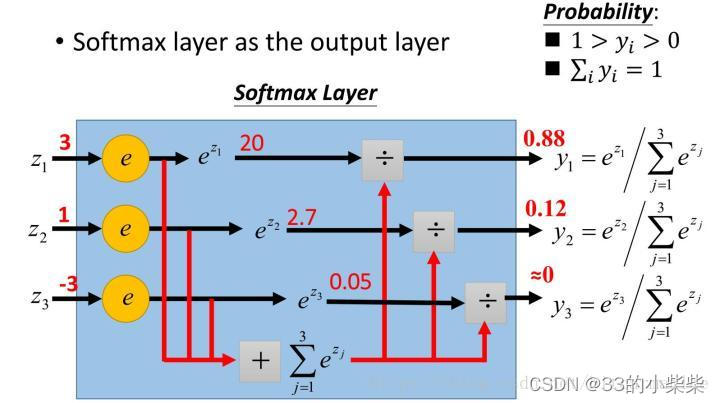
该元素的softmax值就是该元素的指数和所有元素指数和的比值
定义的原因:
1.softmax设计的初衷是希望特征对概率的影响是乘性的。
2.多类目标分类问题的目标函数常常选为cross-entropy。
2.softmax求导
回顾交叉熵损失函数cross entropy
神经网络最后一层的计算方式如下:
1.网络的最后一层得到每个类别的scores。
2.score与sigmoid函数或者softmax函数计算得到概率输出
3.类别概率与真实类别的one-hot形式进行交叉熵计算。
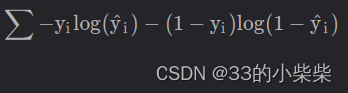
yi表示类别是1,^yi表示预测类别为1的概率。
在多分类问题中,经常使用交叉熵作为损失函数与softmax配合使用

softmax函数

对LOSS求导=yi-1得到损失函数
所以,只需要正向求出yi,将结果-1就是反向更新的梯度。
3.如何实现一个高效的softmax CUDA kernel
Kernel:GPU的基本计算任务描述单元。每个Kernel都会根据配置参数在GPU上由非常多个线程并行执行,GPU计算高效就是因为同时可以由i数千个core(thread)同时执行
GPU的线程在逻辑上分为Thread/Block/Grid三级,硬件上分为core/warp两级
GPU内存分为Global memory/Shared memory/Local memory三级
GPU最主要提供的是两种资源:计算资源和显存带宽资源,优化目标是尽可能充分利用显存带宽资源
4.如何评估一个CUDA Kernel是否充分利用了显存带宽资源?
充分利用指的是Kernel的有效显存读写带宽达到了设备显存带宽的上限,其中设备显存带宽可以通过执行cuda中的bandwidthTest得到。Kernel的有效显存带宽通过Kernel读写数据量和Kernel执行时间进行评估:
当前Kernel的有效显存带宽 = 读写数据量/执行时间
Naive的softmax实现:未经优化的softmax Kernel的最高理论带宽。一个基础的softmax计算中,分别调用几个基础的CUDA Kernel function来完成整体的计算:
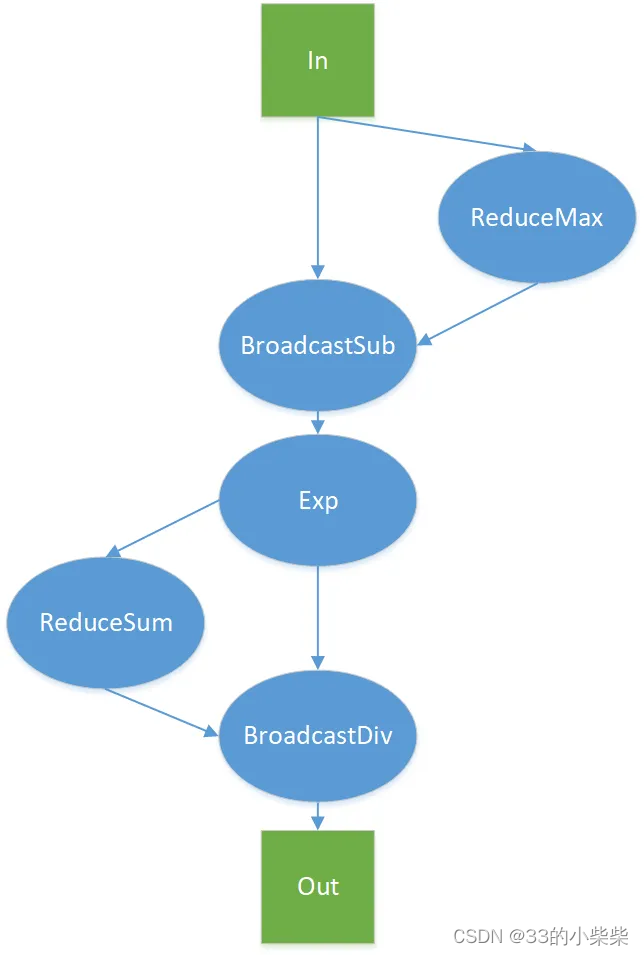
假设输入的数据大小为D,shape=(num_rows,num_cols),即D=num_rows * num_cols,最naive 的操作会多次访问Global memory,其中:
- ReduceMax = D+num_rows(read为D,write为num_rows)
- BroadcaseSub = 2*D + num_rows(read为D+num_rows, write为D)
- Exp = 2*D(read/write均为D)
- ReduceSum=D+num_rows(read为D,write为num_rows)
- BroadcastDive = 2*D+num_rows(read为D+num_rows,write为D)
总共需要8*D+4*num_rows的访存开销。num_rows相比于D可以忽略,则Navie版本的softmax CUDA kernel需要访问至少8倍数据的显存,即:
NaiveSoftmaxKernel有效显存带宽<理论带宽/8
对于3090显卡,其理论带宽上限为936GB/S,Navie版本的Softmax CUDA Kernel利用显存带宽的上界就是936/8=117GB/S。
softmax的shape=(49152,num_cols),其中49152=32*12*128,BERT-base网络中的attention Tensor的前三维,固定前三维,最后一维动态变化
5.OneFlow深度优化Softmax CUDA Kernel的技巧
Softmax函数的输入形状:(num_rows,num_cols),num_cols的变化,会对有效带宽产生影响;没有一种通用的优化方法可以实现在所有的num_cols的情况下都是传输最优的。所以,在OneFlow中采用分段函数优化SoftmaxKernel:对于不同num_cols范围,选择不同的实现,以在所有情况下都能达到较高的有效带宽。
oneFlow中分三种实现,分段对softmax进行优化:
(1)一个Warp处理一行的计算,适用于num_cols<=1024情况
硬件上并行执行的32个线程称为一个warp,同一个warp的32个thread执行同一条指令。warp是GPU调度执行的基本单元。
(2)一个Block处理一行的计算,借助Shared Memory保存中间的结果数据,适用于需要的Shared Memory资源满足Kernel Launch的可启动条件的情况,在本测试环境中是1024<num_cols<=4096
(3)一个Block处理一行的计算,不使用Shared Memory,重复读输入X,适用于不支持(1)(2)的情况。
实现1:每个Warp处理一行元素
每个Warp处理一行元素,行Reduce需要做Warp内的Reduce操作,这里实现WarpAllReduce完成Warp内各线程间的求Global Max和Global Sum操作,WarpAllReduce是利用Warp级别原语__shfl_xor_sync实现的,代码如下。
//声明一个模板函数WarpReduce,接受他的两个模板函数:
//1.ReductionOp:一个模板参数,表示一个接受单个类型参数的模板,该模板应产生一个可调用的对象,用于定义如何归约两个值。
//2.T:要归约的数据类型
template<template<typename> typename ReductionOp, typename T>
//声明一个内联设备函数WarpReduce,该函数在GPU上执行,并接受一个类型为T的val,返回类型为T
__inline__device__ T WarpAllReduce(T val) {
//初始化mask为warp的一半,oxffffffff用于指定那些线程参与同步,全部参与
//当mask>0时,循环继续。这个循环用于在不同层次上将warp中的值进行归约
//利用__shfl_xor_sync将当前线程值与warp中基于当前mask的其他线程的值进行交换
//ReductionOp<T>()(val, ...)调用归约操作来合并当前线程的值和shuffle得到的值
//mask/=2:mask减半,准备进行下一轮的shuffle和归约操作
for (int mask = kWarpSize / 2; mask > 0; mask / = 2) {
val = ReductionOP<T>()(val, __shfl_xor_sync(oxffffffff, val,mask));
}
//返回归约后的值
return val;
}主体循环逻辑,首先根据num_cols信息算出每个线程要处理的cols_per_thread,每个线程分配cols_per_thread大小的寄存器,将输入x读到寄存器中,后续计算均从寄存器中读取。
理论上来说,每个warp处理一行元素的速度是最快的,但是由于需要使用寄存器将输入x缓存起来,而寄存器资源是有限的,并且在num_col>1024情况下,使用shared memory 方法已经足够快乐,因此仅在num_cols<=1024时采用Warp的实现。
//pack_size:每个线程处理的数据包大小
//cols_per_thread:每个线程处理的列数
//padding:是否使用填充(输入矩阵是否已经被填充到warpSize的倍数)
template<typename T, int pack_size, int cols_per_thread, bool padding>
__global__ void SoftmaxWarpImpl(const int64_t rows, const int64_t cols, const T* x, T* y) {
//确保每个线程处理的列数时每个线程处理的数据包的大小的倍数
static_assert(cols_per_thread % pack_size == 0, "");
//每个线程处理的包大小
constexpr int num_packs = cols_per_thread / pack_size;
//列数不超过每个warp处理的列数
assert(cols <= cols_per_thread * kWarpSize);
//为每个线程分配一个缓冲区存储数据
using ComputeType = typename GetComputeType<T>::type;
ComputeType buf[cols_per_thread];
//计算全局warp的id
const int global_warp_id = blockIdx.x * blockDim.y + threadIdx.y;
//计算全局warp的数量
const int num_global_warp = gridDim.x * blockDim.y;
//线程id
const int lane_id = threadIdx.x;
//遍历行
for (int64_t row = global_warp_id; row < rows; row += num_global_warp) {
//计算当前行在输入输出的偏移量
const int64_t row_offset = row * cols;
//计算当前行在输入输出的指针
const T* row_x = x + row_offset;
T* row_y = y + row_offset;
//计算当前行最大的线程数量
ComputeType thread_max = -Inf<ComputeType>();
#pragma unroll//表示展开循环
//循环处理每个包
for (int pack_id = 0; pack_id < num_packs; ++pack_id) {
//计算当前线程处理的列索引
const int col = (pack_id * kWarpSize + lane_id) * pack_size;
//如果不使用填充或者列在有效范围内
if (!padding || col < cols) {
//将输入数据加入到缓冲区
MultiFetch<T, ComputeType, pack_size>()(buf + pack_id * pack_size, row_x + col);
#pragma unroll
//找出线程中的最大值
for (int i = 0; i < pack_size; ++i) {
thread_max = max(thread_max, buf[pack_id * pack_size + i]);
}
} else {
//否则,设为负无穷,初始化buf数组中的一部分将其设为无穷大,确保softmax计算中0或者非常小的数字不会被忽略
#pragma unroll
for (int i = 0; i < pack_size; ++i) { buf[pack_id * pack_size + i] = -Inf<ComputeType>(); }
}
}
//计算warp(一组并行的线程)的最大值,MaxOp定义了如何比较和选择最大值的操作或函数对象
const ComputeType warp_max = WarpAllReduce<MaxOp, ComputeType>(thread_max);
ComputeType thread_sum = 0;
#pragma unroll
//计算softmax并求和,为了计算稳定性,从每个值中减去warp最大值然后取指数
for (int i = 0; i < cols_per_thread; ++i) {
buf[i] = exp(buf[i] - warp_max);
thread_sum += buf[i];
}
//计算warp内的和,计算warp内所有线程的和
const ComputeType warp_sum = WarpAllReduce<SumOp, ComputeType>(thread_sum);
#pragma unroll
//归一化,使和为1,呈概率分布形式
for (int i = 0; i < cols_per_thread; ++i) { buf[i] = buf[i] / warp_sum; }
#pragma unroll
//将结果存回数组或者原始矩阵
for (int i = 0; i < num_packs; ++i) {
const int col = (i * kWarpSize + lane_id) * pack_size;
if (!padding || col < cols) {
MultiStore<ComputeType, T, pack_size>()(row_y + col, buf + i * pack_size);
}
}
}
}实现2:一个Block处理一行元素
一个Block处理一行元素,行Reduce需要做Block内的Reduce操作,需要做Block内线程同步,利用BlockAllReduce完成Warp内各线程间的求Global Max和Global Sum操作。BlockAllReduce时借助Cub的BlockReduce方法实现的
//ReductionOp:模板参数,T:用于归约操作的数据类型,block_size:CUDA块大小
template<template<typename> typename ReductionOp, typename T, int block_size>
__inline__ __device__ T BlockAllReduce(T val) {
typedef cub::BlockReduce<T, block_size> BlockReduce;
//声明共享内存变量,用于在块内的归约操作中存储中间结果
__shared__ typename BlockReduce::TempStorage temp_storage;
//声明 共享内存变量result_broadcast,用于在块内广播归约操作的结果
__shared__ T result_broadcast;
//执行归约操作
T result = BlockReduce(temp_storage).Reduce(val, ReductionOp<T>());
if (threadIdx.x == 0) { result_broadcast = result; }
//线程同步
__syncthreads();
return result_broadcast;
}主体循环逻辑,根据num_cols算出需要的Shared Memory大小作为Launch Kernel参数,借助Shared Memory保存输入,后续计算直接从Shared Memory读取。
由于SM内的Shared Memory资源同样有限,因此当num_cols超过一定范围,kernel启动时申请Shared Memory超过最大限制,就会出现无法启动的问题,因此,仅在调用cudaOccupancyMaxActiveBlocksPerMultiprocessor返回值大于0时采用Shared Memory方案。
此外,由于block内线程要做同步,当SM中正在调度执行一个Block到达同步点时,SM内可执行Warp逐渐减少,若同时执行的Block只有一个,则SM中可同时执行的Warp会在此时逐渐降为0,会导致计算资源空闲,造成浪费,若此时同时有其他Block在执行,则在一个Block到达同步点时仍然有其他Block可以执行。当block_size越小时,SM可以同时调度的Block越多,因此在这种情况下block_size越小越好。但是当在调大block_size,SM能同时调度的Block数不变的情况下,block_size越大越好,越大就有越好的并行度。因此代码中在选择block_size时,对不同block_size都计算了cudaOccupancyMaxActiveBlocksPerMultiprocessor,若结果相同,使用较大的block_size。
template<typename T, int pack_size, int block_size>
__global__ void SoftmaxBlockSMemImpl(const int64_t rows, const int64_t cols, const T* x, T* y) {
using ComputeType = typename GetComputeType<T>::type;
//共享内存定义
extern __shared__ __align__(sizeof(ComputeType)) unsigned char shared_buf[];
auto* buf = reinterpret_cast<ComputeType*>(shared_buf);
//获取当前线程id
const int tid = threadIdx.x;
assert(cols % pack_size == 0);
const int num_packs = cols / pack_size;
//外层循环用来迭代每一行。由于每一个线程块可能处理多行数据,使用blockidx.x确定当前线程块处理的起始行
for (int64_t row = blockIdx.x; row < rows; row += gridDim.x) {
//计算当前行的偏移量,并初始化输入和输出指针。初始化一个变量来跟踪线程的最大值
const int64_t row_offset = row * cols;
const T* row_x = x + row_offset;
T* row_y = y + row_offset;
ComputeType thread_max = -Inf<ComputeType>();
//数据包加载和最大值查找
for (int pack_id = tid; pack_id < num_packs; pack_id += block_size) {
ComputeType pack[pack_size];
MultiFetch<T, ComputeType, pack_size>()(pack, row_x + pack_id * pack_size);
#pragma unroll
for (int i = 0; i < pack_size; ++i) {
buf[i * num_packs + pack_id] = pack[i];
thread_max = max(thread_max, pack[i]);
}
}
//使用块内归约操作找到整个块的最大值和总和
const ComputeType row_max = BlockAllReduce<MaxOp, ComputeType, block_size>(thread_max);
ComputeType thread_sum = 0;
for (int col = tid; col < cols; col += block_size) {
const ComputeType exp_x = exp(buf[col] - row_max);
buf[col] = exp_x;
thread_sum += exp_x;
}
const ComputeType row_sum = BlockAllReduce<SumOp, ComputeType, block_size>(thread_sum);
//计算softmax值并存储
for (int pack_id = tid; pack_id < num_packs; pack_id += block_size) {
ComputeType pack[pack_size];
#pragma unroll
for (int i = 0; i < pack_size; ++i) {
pack[i] = buf[i * num_packs + pack_id] / row_sum;
thread_max = max(thread_max, pack[i]);
}
MultiStore<ComputeType, T, pack_size>()(row_y + pack_id * pack_size, pack);
}
}
}实现3:一个Block处理一行的元素,不是用Shared Memory
重复读输入x和实现2一样,仍然是一个Block处理一行元素,不同的是,不再用Shared Memory缓存x,而是在每次计算时重新读输入x,这种实现没有最大num_cols的限制,可以支持任意大小。
此外需要注意的是,在这种实现中,block_size应该设越大越好,block_size越大,SM中能同时并执行的Block数就越少,对cache的需求就越少,就有更多机会命中Cache,多次读x不会多次访问Global Memory,因此在实际测试中,在能利用Cache情况下,有效带宽不会因为读3次x而降低几倍。
//定义一个CUDA核函数模板,接受三个模板参数:数据类型T,数据包大小pack_size,线程块大小
template<typename T, int pack_size, int block_size>
__global__ void SoftmaxBlockUncachedImpl(const int64_t rows, const int64_t cols, const T* x, T* y) {
//使用computeType模板元函数来确定用于计算的数据类型
using ComputeType = typename GetComputeType<T>::type;
//获取当前线程ID
const int tid = threadIdx.x;
//断言:确保列数是数据包大小的整数倍
assert(cols % pack_size == 0);
//计算数据包数量
const int num_packs = cols / pack_size;
//外层循环 迭代每一行
for (int64_t row = blockIdx.x; row < rows; row += gridDim.x) {
//计算当前行的偏移量
const int64_t row_offset = row * cols;
//指向当前行的输入和输出数据的指针
const T* row_x = x + row_offset;
T* row_y = y + row_offset;
//初始化线程最大值为负无穷大
ComputeType thread_max = -Inf<ComputeType>();
//内层循环:加载数据包并找到整个线程块的最大值
for (int pack_id = tid; pack_id < num_packs; pack_id += block_size) {
ComputeType pack[pack_size];
MultiFetch<T, ComputeType, pack_size>()(pack, row_x + pack_id * pack_size);
//展开循环,找到当前线程的最大值
#pragma unroll
for (int i = 0; i < pack_size; ++i) { thread_max = max(thread_max, pack[i]); }
}
//使用blockallreduce模板函数找到整个线程块的最大值
const ComputeType row_max = BlockAllReduce<MaxOp, ComputeType, block_size>(thread_max);
ComputeType thread_sum = 0;
//再次遍历数据包,计算每个数据包的指数和
for (int pack_id = tid; pack_id < num_packs; pack_id += block_size) {
ComputeType pack[pack_size];
MultiFetch<T, ComputeType, pack_size>()(pack, row_x + pack_id * pack_size);
//展开循环,计算指数和
#pragma unroll
for (int i = 0; i < pack_size; ++i) { thread_sum += exp(pack[i] - row_max); }
}
//使用blockallreduce模板函数找到整个线程块的和
const ComputeType row_sum = BlockAllReduce<SumOp, ComputeType, block_size>(thread_sum);
for (int pack_id = tid; pack_id < num_packs; pack_id += block_size) {
ComputeType pack[pack_size];
MultiFetch<T, ComputeType, pack_size>()(pack, row_x + pack_id * pack_size);
//展开循环,计算softmax值
#pragma unroll
for (int i = 0; i < pack_size; ++i) { pack[i] = exp(pack[i] - row_max) / row_sum; }
//使用multistore模板函数将结果存储到全局内存中
MultiStore<ComputeType, T, pack_size>()(row_y + pack_id * pack_size, pack);
}
}
}6.公共优化技巧
1.将Half类型pack成Half2进行存取,在不改变延迟情况下提高指令吞吐,类似CUDA template for element-wise kernels 的优化
2.Shared Memory中的 Bank Conflicts
CUDA将Shared Memory按照4字节或8字节大小划分到32个bank中,对于Volta架构是4字节,以4字节为例,0-128bytes地址分别在bank0-31中,128-256也分别在bank0-31中。
当一个Warp内的不同线程访问同一个bank 的不同地址,就会出现Bank Conflicts。当发生bank冲突时,线程间只能顺序访问,增加延迟,
若一个Warp内每个线程读4个字节,顺序访问,则不会有Bank Conflicts,若一个Warp内每个线程读8个字节,则Warp内0号线程访问的地址在第0和第1个bank,1号线程访问的地址在第2和第3个bank,以此类推,16号线程访问地址又在第0和第1个bank内,和0号线程访问了同一个bank的不同地址,此时即产生了bank冲突
在实现2中,给Shared memory赋值过程中,若采用下面方法,当pack_size=2,每个线程写连续两个4byte地址,就会产生bank conflicts
#pragma unroll
for(int j = 0; j < pack_size; ++j) {
buf[pack_id * pack_size * j] = pack[j];
thread_max = max(thread_max, pack[j]);
}因此,在实现(2)中,对Shared memory采用了新的内存布局,避免了同一个Warp访问相同bank的不同地址,避免了Bank Conflicts。
#pragma unroll
for(int j = 0; j < pack_size; ++j) {
buf[num_packs * j + pack_id] = pack[j];
thread_max = max(thread_max, pack[j]);
}